Embed Size (px)
Citation preview

134 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 44, NO. 1, JANUARY 2006
The Influence of Target Acceleration on VelocityEstimation in Dual-Channel SAR-GMTI
Jayanti J. Sharma, Christoph H. Gierull, Senior Member, IEEE, and Michael J. Collins, Senior Member, IEEE
Abstract—This paper investigates the effects of target accel-eration on estimating the velocity vector of a ground movingtarget from single-pass dual-channel synthetic aperture radardata. Although vehicles traveling on roads and highways routinelyexperience acceleration, the majority of estimation algorithmsassume a constant velocity scenario, which may result in erro-neous estimates of target velocity. It is shown that under mostconditions, acceleration has only minor effects on the estimationof across-track velocity using along-track interferometric phase.However, under the assumption of constant velocity, accelerationmay significantly bias the estimate of along-track velocity. Theinfluence of both along-track and across-track accelerationsis examined through simulations of an airborne geometry andexperimental data from Environment Canada’s airborne CV 580dual-channel synthetic aperture radar system.
Index Terms—Airborne radar, interferometry, matched filters,parameter estimation, synthetic aperture radar (SAR), velocitymeasurement.
I. INTRODUCTION
SYNTHETIC aperture radar (SAR) systems have become animportant tool for fine-resolution mapping and other remote
sensing operations [1]. In many civilian and military applica-tions of airborne and spaceborne SAR imaging, it is desirableto monitor ground traffic simultaneously [2], [3], giving rise tothe field of SAR-ground moving-target indication (GMTI).
The challenge of GMTI includes both the detection of targetsand the estimation of their velocities. Since there is usually littlea priori knowledge of target velocity, we generally start with astationary scene assumption. The topic of moving-target detec-tion in clutter has been extensively studied [3]–[9], and here it isassumed that moving targets have been detected using the dis-placed phase center antenna (DPCA) method, along-track inter-ferometric (ATI) phase, space-time adaptive processing (STAP),or some other metric.
The majority of SAR-GMTI detection algorithms makeuse of multiple apertures to provide an additional degree (ordegrees) of freedom with which unwanted clutter may be
Manuscript received September 15, 2004; revised April 21, 2005. This workwas supported in part by Defence Research and Development Canada—Ottawa,in part by the University of Calgary, in part by the National Science and Engi-neering Research Council, and in part by Alberta Learning.
J. J. Sharma was with the Department of Geomatics Engineering, Uni-versity of Calgary, Calgary, T2N 1N4 AB, Canada. She is now with theGerman Aerospace Center (DLR), 82234 Wessling, Germany (e-mail:[email protected]).
M. J. Collins is with the Department of Geomatics Engineering, Universityof Calgary, Calgary, T2N 1N4 AB, Canada (e-mail: [email protected]).
C. H. Gierull is with the Radar Systems Section, Defence R&D Canada-Ot-tawa (DRDC Ottawa), ON K1A 0Z4, Canada.
Digital Object Identifier 10.1109/TGRS.2005.859343
suppressed (e.g., [6] and [10]). Of particular interest is thesingle-pass dual-antenna case, since most operational andnear-future airborne and spaceborne GMTI systems are lim-ited to two channels for financial and practical reasons [11].Examples of such systems include Environment Canada’sConvair 580 airborne SAR, and the Canadian RADARSAT-2spaceborne sensor (scheduled for launch in 2006 [12]).
After detection of a moving target, it is often desirable toestimate its velocity in the along- and across-track directions.This information is useful for monitoring ground vehicles, repo-sitioning them to their true azimuth broadside location on theimage, and extrapolating a target’s future position. Algorithmsemploying ATI phase to determine across-track velocity [7],[13], [14] and the peak response among a bank of matched fil-ters to compute along-track velocity [11], [15] are widely usedin target velocity estimation. However, in the majority of GMTIliterature it is assumed that targets travel with constant velocity.One potential application of GMTI is monitoring vehicle trafficon roads and highways, where target acceleration is common-place and must be considered.
There has been very little published research examining theimpacts of target acceleration on GMTI directly. Although somepapers include one component of acceleration in the standardrange equations for completeness (e.g., [16] and [17]), there areno papers (to the authors’ knowledge) which examine the effectsof target acceleration on velocity estimation either theoreticallyor in experimental data.
This paper investigates the effects of along- and across-trackacceleration on velocity estimation for point targets indual-aperture SAR-GMTI data under a constant target velocityassumption. In Section II, the theoretical range-compressedand azimuth-compressed moving-target signals received by adual-channel airborne SAR are derived. Section III outlines theimpact of target acceleration on along-track velocity estimationwhen using a bank of matched filters, and Section IV describesacceleration’s influence on across-track velocity estimates fromthe ATI phase. Since the effects of acceleration on along- andacross-track velocity estimation are very different, they aregiven separate treatment. Within each section, the estimationalgorithm is described, followed by an analysis of the effectof each motion parameter on the resulting velocity estimatethrough the use of theory and simulation. Finally, the standardestimation algorithms are applied to experimental data col-lected by the airborne CV 580 SAR to estimate the velocityvector of controlled movers. These velocity estimates are com-pared to GPS velocities, and the similarities and discrepanciesbetween the values are discussed. A summary of the findingsare presented in the closing section.
0196-2892/$20.00 © 2006 IEEE

SHARMA et al.: INFLUENCE OF TARGET ACCELERATION ON VELOCITY ESTIMATION 135
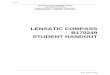
Fig. 1. Top-down view of antenna and accelerating target geometry for anairborne scenario.
II. MODEL OF THE RECEIVED ECHO
This section proposes a deterministic model for the echoesbackscattered from a moving point target and received by alinear antenna array with two elements. This model provides thebasis for determining the effects of acceleration on the receivedand processed signal data. The range- and azimuth-compressedsignals are derived for a SAR on an airborne platform only. Thespaceborne expressions are similar, but additional factors suchas Earth curvature and Earth rotation must be taken into account[18].
A. Radar–Target Geometry
A conventional range and azimuth coordinate system is as-sumed in which the azimuth direction is taken to be parallelto the motion of the radar, and range is perpendicular to themotion of the radar. The target and radar geometry for the air-borne case is illustrated in Fig. 1, where the x axis representsthe along-track direction and the y axis the across-track direc-tion (on the ground). The z axis (coming out of the page) is theelevation above the Earth’s surface. The radar transmitter on-board the aircraft moves with constant velocity along the xaxis, crossing the range or y axis at time 0 (broadside time).The radar is side-looking with a fixed pointing angle orthog-onal to the flight path and a fixed altitude . Radar pulses aretransmitted at regular intervals in time given by the pulse repe-tition frequency [(PRF), also given as ]. It is assumed thatthe sampling interval is small enough to warrant a signal rep-resentation in continuous time. A point target is assumed to beat position (0, , 0) at time 0 and to move with velocitycomponents and at broadside and acceleration compo-nents and (which may or may not be time-varying) alongthe x and y axes, respectively. The target’s height is assumed tobe zero over the entire observation period, and the target is as-sumed to be nonrotating. is the slant rangeat 0 and represents the range from the radar to thetarget at any time .
The equation for the range to an accelerating point target fromthe radar platform is given as
(1)
where and are the along- and across-track accelerationsat broadside, and the dots indicate time derivatives of the targetacceleration (higher order acceleration terms are assumed to benegligible). Equation (1) may be written as a third-order Taylorseries expansion about broadside time 0
(2)
where cubic terms on the order of have been dropped as-suming that and that for theground vehicles under consideration.
A dual-channel system is equipped with two antennae (de-noted as the fore and aft antennae, respectively) whose phasecenters are separated by distance . The distance from the radarplatform to the target is assumed to be large enough such thatthe far-field approximation may apply.
B. Model of the Range-Compressed Received Echo
It is assumed that at each second interval, a radarpulse is transmitted from the fore antenna, backscattered froma single ground point scatterer, received by each antenna, andprocessed by a typical chain of radio-frequency (RF) downcon-version, IF (intermediate frequency) bandpass filtering, rangecompression, and range migration compensation. The range-compressed target signal for the th receiving channel canbe expressed in terms of the range history through time usingthe following model [19]:
(3)
where is the magnitude of the th channel, is the di-rection cosine from the th antenna to the moving target on theground, is the range from the transmitting antennato the moving target and back to the th antenna, is the imagi-nary unit, is the wavenumber , and rect is a rectangularwindow centered at 0 of length (the synthetic aperturelength in units of time). The magnitude variable includesthe two-way antenna gain pattern, target reflectivity, and spher-ical propagation losses. It is assumed that the radar cross section(RCS) of the point target remains constant with viewing angleover the course of the synthetic aperture. Let the signal received

136 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 44, NO. 1, JANUARY 2006
at the fore antenna be denoted and the signal at the aft an-tenna be denoted . In order to process multiaperture data,one must determine the relation between the fore and aft rangesto the target through time.
Using trigonometry and further Taylor series expansions, theone-way distance to the target from the aft antenna maybe expressed as a function of such that
(4)
where from (1). A derivation of (4) is providedin the Appendix.
Several of the multiaperture GMTI techniques used for de-tection and parameter estimation (including DPCA and ATI) re-quire channel registration prior to further processing such thatthe two antenna phase centers are at the same spatial locationat different times. One can select a PRF in accordance withthe radar platform speed and physical separation distance ofthe antennae such that the antenna phase centers for consecu-tive pulses coincide. However, such restrictions on the PRF areunnecessary, and channel registration may be performed by in-terpolating the aft samples at nonsampled times [10], [20]. Thetwo-way range histories for the fore and aft antennae after thissampling operation are given in (32) and (36) of the Appendix.
Assuming that the radar transmits each pulse with the foreantenna and receives on both channels, the signals returned bythe fore and aft channels are given as
(5)
(6)
where and are given in (37) and (38), respectively.
C. Model of the Azimuth-Compressed Received Echo
Azimuth compression is achieved by constructing a referencefilter with a phase history matched to that of the received signal,and then cross-correlating this reference with the target signal[21]. Thus, for the th (either fore or aft) channel
(7)
where is the focused signal for the th channel, isthe received target signal (after range compression), is thereference signal, and denotes complex conjugation. Duration
is the maximum usable synthetic aperture time, often takenas the 3-dB azimuthal beamwidth. A division by is insertedinto (7) such that the focused signal is unitless.
If a target is stationary, then the target in both channels maybe focused using a stationary world matched filter (SWMF)
(8)
where represents the reference signal whose rangehistory is derived by setting all target velocities and accelera-tions to zero in (37), and removing the first term (which willsimply shift the phase of the reference filter a constant amount).
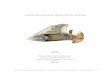
Fig. 2. Magnitude response (after azimuth compression) of simulated pointtargets focused using a stationary world matched filter versus azimuthaldistance. An azimuth of 0 m is broadside. (Top) Stationary target with highpeak power. (Bottom) Target with across-track acceleration a = 0.1 m/sand all other motion parameters set to zero. Note the severe azimuthal smearingof the response from the accelerating target, indicating a mismatched referencefilter.
Performing the cross-correlation in (7) and assuming that theantenna gain is removed such that the magnitude is no longer afunction of time and is identical in both channels (i.e.,
), then the focused stationary target image is given by
(9)
where the azimuth compression creates a focused peak at broad-side time 0.
This sharp peak from stationary targets contrasts with theazimuth-compressed response from a moving point target fo-cused using a stationary world matched filter. When processedusing conventional SAR-imaging techniques, the response froma moving target is highly dependent upon the target dynamics,such that the image becomes smeared in range from target rangewalk and shifted in azimuth due to across-track velocity, andsmeared in azimuth due to along-track velocity and across-trackacceleration [16].
Inserting from (5) into (7) gives an equation whichcannot be solved analytically because there is no closed-formexpression for the definite integral of and withrespect to . However, this integration may be performed numer-ically to demonstrate the decrease in peak power and smearingcaused by a mismatched reference filter. Fig. 2 shows the re-sponse from a stationary target, and one with motion parame-ters 0 0 0 0.1 0 m/s focused usinga SWMF. Note the sharp response from the stationary target andthe severe smearing after azimuth compression of the acceler-ating target. Radar parameters and an airborne geometry typicalof Environment Canada’s CV 580 SAR were used, with param-eters listed in Table I.

SHARMA et al.: INFLUENCE OF TARGET ACCELERATION ON VELOCITY ESTIMATION 137
TABLE IRADAR AND GEOMETRY PARAMETERS FOR AIRBORNE SAR
SIMULATIONS TYPICAL OF THE CV 580 VALUES
If it is assumed that and are zero such that the third-order term of the Taylor series expansion of the range equationis neglegibly small, and if the phase history of the target and ref-erence signals are matched, then the azimuth compression maybe evaluated in closed form. Let the reference filter be repre-sented as
(10)
Performing the cross-correlation from (7) and assuming that theantenna gain is removed such that the signal amplitude is nolonger a function of time, then the focused moving-target imagefor the fore channel is given by
(11)
where
(12)
The maximum of occurs when the argument of the sincfunction is zero, and thus the peak response of the focused targetappears at broadside time 0.
The closed-form focused response from the aft signal datamay also be computed if the reference filter from (10) is used,and it is assumed that and are zero such that the cubicterm may be dropped. The reference filter is matched perfectlyto the target dynamics, and upon correlation of signal with
, the compressed image is obtained
(13)
where
(14)
(15)
The sinc function in the focused aft channel data is similar tothat from the fore channel (11). Despite the added term in thesinc argument, the peak response of the aft channel is shiftedonly a few centimeters from that of the fore channel for typicalairborne scenarios.
III. ESTIMATION OF ALONG-TRACK VELOCITY
One method of estimating along-track velocity applies abank of reference filters to the target signal to determine whichfilter best focuses the data [11]. This technique determineswhich filter best fits the quadratic coefficient from the range(2) under a zero-acceleration assumption, although additionalinformation is required to separate along- and across-trackvelocity contributions to this coefficient [15]. One techniqueimplements filters initialized with various velocities and
0. The signal data are convolved with eachreference filter in turn, and the output is saved to a matrix, whichis then scanned to find the location of the maximum magnitudevalue. A two-dimensional (2-D) search over the synthetic aper-ture time s and over the along-track velocityrange of interest (e.g., m/s) is required. Thefilter maximizing the magnitude of the azimuth-compressedresponse corresponds to the best estimate of along-track ve-locity, denoted as . Oftentimes, the DPCA signal (formed bydifferencing the fore and registered aft channels) is compressedusing the filterbank rather than only the fore or aft channel inorder to avoid obtaining maxima due to clutter discretes (suchas buildings).
Analytically, the true velocity (when target across-trackvelocity and accelerations are zero) can be found by maximizingthe azimuth-compressed magnitude from (7) with respect toand time . In other words, one must determine the along-trackvelocity and time maximizing
(16)
where the reference filter for best focus is given by
(17)
However, (16) cannot be evaluated in closed form, and thus onemust one use a numerical solution by searching the 2-D variablespace for the maximum magnitude response.
The estimation of using a bank of reference filters fora target traveling with constant velocity has been examinedin [11]. One problem with the proposed matched filterbankalgorithm is that it assumes the quadratic coefficient in therange equation is due solely to contributions from along-trackradar–target motion (i.e., from and ). However, as seenin (2), the second-order component of the range equation alsocontains a term which will bias the estimationof in the presence of large velocities. However, biases

138 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 44, NO. 1, JANUARY 2006
due to nonzero are not overly severe for the range of targetvelocities seen in ground vehicles, and one may compensate forthe across-track component through an iterative solution. Onecan estimate using the filterbank approach, estimateusing the along-track interferometric phase (see Section IV),and then revise by taking the computed across-track ve-locity into account. This procedure can be repeated to convergeupon the true along-track velocity.
To evaluate the influence of target acceleration on the esti-mation of along-track velocity, several simulations were con-ducted. Unless otherwise stated, all simulations assume an air-borne geometry with parameters typical of the CV 580 system(given in Table I). In each case the filterbank and search methodwas applied to simulated signal data of a moving point target.Filterbank velocities varied from 30 to 30 m/s in steps of0.03 m/s.
A. Estimating in the Presence of
When a target possesses an across-track acceleration com-ponent, estimation of becomes challenging. Both and
determine the value of the second-order coefficient of therange equation (2), and their effects are difficult to separate. Un-compensated and both cause severe defocusing of thetarget in the azimuth-compressed response. If it is assumed thata target has constant velocity when it is actually accelerating,this acceleration will be mistaken for along-track velocity andthere may be a sizeable bias in the estimate of .
The magnitude of the bias can be examined by equating theassumed quadratic coefficient [from the reference filter of (17)]with the true quadratic coefficient [from (2)] to obtain
(18)
where the bias is .Assuming 0 in order to isolate the effects of , and
assuming an airborne geometry typical of the CV 580 system,(18) predicts a bias of 23.5 m/s for an acceleration of1 m/s and 0. Even a very slight acceleration of0.1 m/s introduces a bias of 2.5 m/s, as shown in the fil-terbank map of Fig. 3. Each row of the filterbank map cor-responds to the output after compression using one referencefilter. The DPCA signal was not used since it is negligible foran across-track velocity of zero, as in this scenario [14].
Across-track acceleration can thus introduce significant bi-ases when estimating if it is assumed that targets travel at aconstant velocity. However, even if one acknowledges the possi-bility of across-track acceleration, will be indistinguishablefrom ; they are both contained in the quadratic coefficient ofthe range equation and they cannot be estimated independentlyin the absence of a priori data (such as from inertial systemsonboard the target) or additional SAR channels.
Across-track acceleration combined with nonzeroacross-track velocity (as is generally the case in realisticmoving-target scenarios) introduces a small cubic componentinto the target range history according to (2). From the rangeequation it is theoretically possible to solve for (assuming
Fig. 3. Magnitude responses of a simulated point target with a = 0.1 m/s(and all other motion parameters set to zero) after compression with a bank ofreference filters initialized with various v . An azimuth of 0 m is broadside.Note that v̂ (estimated from the location of peak power) is biased by�2.5 m/s,since the true along-track velocity is zero.
0) by implementing a three-dimensional fil-terbank algorithm to determine the third-order coefficient.However, for the range of target velocities and accelerations ofinterest, the contribution of to this component is virtuallynegligible; it is and which are dominant in determiningthe cubic component.
B. Estimating in the Presence of
In the presence of an along-track acceleration component,the target signal has a significant cubic term as predicted in therange (2). When the filterbank method is applied to the data,it is attempted to match a quadratic reference filter to a cubicsignal. This results in an uncompensated third-order componentwhose impacts on the azimuth-compressed response include thefollowing:
• smearing of the target energy across multiple veloci-ties in the filterbank and multiple cells in azimuth, whichseverely decreases peak power;
• creation of two peaks (instead of one) (where, for in-stance, the peaks are shifted from zero in the stationarycase to 0.3 m/s for an 0.5 m/s and all other mo-tion parameters set to zero);
• slight shift in the azimuth focused position (e.g., the twopeaks focus at an azimuth 0.4 m away from broadside foran 0.5 m/s and all other motion parameters set tozero).
Some of these effects may be seen in a comparison betweenthe filterbank magnitude image of a stationary target, and atarget with 0.5 m/s (with all other motion parametersset to zero) in Fig. 4. The most striking effect is the decrease inpeak power of the target responses; the full target energy is nevercaptured by one filter since none of the (second-order) refer-ence filters represents the true (cubic) phase history of the targetthrough time. This uncompensated cubic term creates asym-metric sidelobes visible in Fig. 4 as fringes extending in the pos-itive azimuth direction. Also apparent in Fig. 4 is the smearingof target energy across multiple filters. Although difficult

SHARMA et al.: INFLUENCE OF TARGET ACCELERATION ON VELOCITY ESTIMATION 139
Fig. 4. Magnitude responses of a simulated point target with a = 0.5 m/s(and all other motion parameters set to zero) after compression with a bankof reference filters initialized with various v velocities. An azimuth of 0 m isbroadside. Note the decrease in peak power and smearing of target energy acrossmultiple v velocities in the accelerating case; although difficult to discern,there is also a small bias in estimated v̂ on the order of 0.3 m/s.
to discern in the figure, two peaks are observed in the filter-bank of the accelerating target. This is due to two reference fil-ters (with parabolic range histories) giving relatively large mag-nitude responses compared to the other matched filters. Sincethese quadratic functions do not have intercepts of 0, the targetis not focused exactly at broadside (i.e., at an azimuth of ).In Fig. 4 the peaks are slightly offset from broadside position byapproximately 0.4 m, although this shift is negligible when com-pared to the shift induced by an uncompensated across-track ve-locity component, which can be on the order of tens to hundredsof meters.
Uncompensated will introduce small biases into the esti-mation of velocity (on the order of 1 m/s for 1 m/sin this simulated geometry). However the most severe effect isa decrease in peak power which may make it difficult to find thelocation of peak power and thus to estimate , especially inthe presence of residual clutter and noise.
C. Estimating in the Presence of
Since both and appear in the cubic coefficient of therange (2), the effects of time-varying across-track accelerationon estimation are very similar to the impacts of along-trackacceleration . This was confirmed in simulations of the CV580 airborne geometry, where an of 0.03 m/s (and all othermotion parameters set to zero) introduces a bias of 0.3 m/s in
.
D. Estimating in the Presence of Clutter
In addition to simulations of deterministic target signals, sim-ulations were conducted to determine the influence of targetacceleration on along-track velocity estimation in the presenceof homogeneous clutter and additive noise. Correlated complexGaussian clutter was simulated with a coherence of 0.95, a rela-tively conservative value for land clutter observed from typical
Fig. 5. Magnitude responses of simulated point targets with (left)a = 0.1 m/s and (right) a = 0.5 m/s after DPCA clutter suppressionand compression with a bank of reference filters. The signals were generatedwith an SCR of 0 dB and a CNR of 30 dB. Clutter was simulated using acomplex normal distribution with a coherence of 0.95. Each target also has anacross-track broadside velocity v = 1 m/s to ensure that the DPCA signal isnonzero. Note the similarities to the filterbank maps of Figs. 3 and 4, althoughthe peak power has decreased considerably and the target responses have beenazimuthally shifted due to the nonzero across-track velocity.
airborne platforms [9]. The signal-to-clutter ratio (SCR) wasset to 0 dB before azimuth compression and the clutter-to-noiseratio (CNR) to 30 dB.
Two accelerating targets (one with 0.1 m/s , the otherwith 0.5 m/s ) were simulated in the clutter environmentdescribed above. Each target was also given an across-track ve-locity component 1 m/s such that the DPCA magnitudesignal was nonzero over the course of the observation interval[22]. Signals were generated for both the fore and aft chan-nels and subtracted to compute the DPCA clutter-suppressed re-sponse. As in previous simulations, a filterbank of 2000 matchedfilters with along-track velocities ranging from 30 to 30 m/s(spaced every 0.03 m/s) was used to focus the data.
The filterbank maps for the two accelerating targets are shownin Fig. 5. No stationary target signal is displayed since its filter-bank map contains no defined peak; for nonmoving targets theexpected value of the DPCA signal is nearly zero [22]. Note thedifferent axis scales of the two frames in Fig. 5. The responsesare similar to those obtained when simulating purely determin-istic signals in Figs. 3 and 4, although the peak magnitude hasdecreased considerably (compare color bars) and there is an az-imuthal shift of approximately 50 m in the target responses dueto the nonzero across-track velocity. Still, even in the presenceof clutter, additive noise, and a nonzero , across-track accel-eration results in a sharply focused although biased peak in thefilterbank map, whereas along-track acceleration creates severesmearing of the filterbank image, making it difficult to identify adistinct peak. Such accelerations thus have a significant impacton the estimation of along-track velocity .
E. Experimental Results for Estimation
To test along-track velocity estimation in experimental data,the filterbank method was applied to 22 target tracks extracted

140 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 44, NO. 1, JANUARY 2006
Fig. 6. Delta control target from the Petawawa 2000 data collection (DRDCOttawa).
from SAR data. The data were collected during an experimentconducted at Canadian Forces Base (CFB) Petawawa with theEnvironment Canada CV 580 C-Band SAR in November of2000. The CV 580 was equipped with two antennae separated inthe along-track direction, collecting dual-channel data for eightpasses. The experimental setup and further results are describedin [14].
Three controlled movers were involved in the data campaignattempting to maintain constant speeds at imaging time. Con-trol targets were equipped with GPS receivers collecting carrier-phase data (for precise position and velocity information) and atrihedral corner reflector was mounted to each target. Two ofthe controlled moving targets (denoted as “Delta” and “Juliet”)consisted of remotely controlled, engine-powered carts guidedby a rail system (see Fig. 6). A four-vehicle convoy was alsodeployed traveling along a straight segment of gravel road. Al-though the entire convoy was traveling at approximately thesame speed, the latter three targets were not used in the anal-ysis because they were not equipped with GPS receivers. Thepickup truck at the front of the convoy is hereafter referred toas the “Convoy” target. A detection and tracking algorithm inthe range-compressed domain (see [11]) using the DPCA tech-nique for clutter suppression was employed to extract and storethe track of each target through azimuth time.
A filterbank of 2000 matched filters with along-track veloc-ities ranging from 30 to 30 m/s (spaced every 0.03 m/s) wasused to focus the data. The range-compressed fore and aft targettracks were subtracted and then convolved with each matchedfilter to compute the azimuth-compressed DPCA filterbankmap. DPCA was used to suppress clutter, thus preventing anyclutter discretes from biasing the estimation of . All targetshad nonzero across-track velocity not equal to a blindvelocity, and thus all targets had nonzero DPCA magnitude.The location of the peak power response in the DPCA filterbank
TABLE IICOMPARISON OF ALONG-TRACK VELOCITIES (v ) ESTIMATED USING
THE FILTERBANK METHOD FROM DUAL-CHANNEL SAR DATA
map was used to find the filter most closely matched to the truealong-track velocity.
The along-track velocities estimated using the filterbankmethod for each target and their velocities as measured usingGPS are presented in Table II. The GPS velocities are projectedto have a worst case accuracy of 0.5 m/s [22]. Note that line2, pass 6 (abbreviated l2p6) only had data for the Convoytarget since the Juliet and Delta targets were stationary duringimaging time due to a miscommunication with the aircraft.
Taking the absolute value of the differences between the GPSvelocities and the estimated target velocities, a mean error of2.9 m/s was found in as estimated from the SAR data witha standard deviation of 2.6 m/s. A number of targets had signif-icant biases in their along-track velocity estimates when com-pared to the GPS values, with a maximum bias of 9.3 m/s. Theselarge biases may indicate the presence of possible along- andacross-track acceleration components.

SHARMA et al.: INFLUENCE OF TARGET ACCELERATION ON VELOCITY ESTIMATION 141
Fig. 7. DPCA filterbank magnitude map from one pass of the Convoy target(line 1, pass 5). The peak response occurs at v = 11.5 m/s, whereas the GPSvelocity is 5.7 m/s, indicating a severe bias in the v̂ estimate which may bedue to the presence of across-track acceleration a .
Fig. 8. DPCA filterbank magnitude map from one pass of the Juliet target(line 2, pass 2). In addition to a bias in the v̂ estimate, this target displaysasymmetric sidelobes to the left-hand side of the peak response and smearingof the target energy characteristic of an uncompensated cubic component in thefocusing operation.
An example of a biased estimate from one pass of theConvoy target is shown in Fig. 7. There is a clear peak responsein the filterbank magnitude map at a of 11.5 m/s. However,the GPS velocity is only 5.7 m/s, pointing to a possible acceler-ation bias due to as described in Section III-A.
In addition to biases in , the smearing effects and asym-metric sidelobes characteristic of an uncompensated cubic termare also visible in the experimental data. Fig. 8 shows the filter-bank map from one pass of the Juliet target in which along-trackacceleration and/or time-varying across-track acceleration
may be causing the smearing and asymmetric sidelobe ef-fects as were observed in simulations (see Section III-B). Theremay also be higher-order target motion components, impropermotion compensation of the platform velocity, incorrect esti-mates of , and other parameters, or residual clutter,which may be having additional impact upon the filterbank map.
Unfortunately, it is difficult to determine the target’s true ac-celeration components since GPS data were only collected everytwo seconds. Although variations in the GPS velocity over thesynthetic aperture reveal that acceleration is occurring in manyof the target passes, a higher sampling rate is required for preciseacceleration time-histories. Extremely accurate estimates of ac-celeration would be needed in any case, since simulations haveshown that one must be concerned with even slight accelerationson the order of 0.1 m/s or less. Future experimental trials couldequip controlled movers with survey-grade GPS systems func-tioning at a higher sampling rate and inertial systems with gy-roscopes in order to determine a target’s acceleration time-his-tory. However, although the limited ground-truth prevents directsupport of our hypotheses, the effects of target acceleration aspredicted in the theoretical analysis are consistent with resultsfrom the experimental data.
IV. ESTIMATION OF ACROSS-TRACK VELOCITY
Across-track velocity is a fundamental parameter of interestfor GMTI applications which may be estimated using the along-track interferometric phase. For a two-channel SAR system,the ATI signal is computed by multiplying the signal from onechannel by the complex conjugate of the second (registered)channel
ATI(19)
where and are the phase angles of the first andsecond channels, respectively [14]. The phase of the ATI signalis related to the target motion parameters although it is domi-nated by the across-track velocity , and may thus be used inits estimation. For stationary terrain, the fore and aft signals areidentical and the ATI phase is zero. The ATI method is chosento estimate across-track velocity because of its sensitivity tocompared to other techniques (e.g., subaperture methods andtracking of the target range walk). However, ATI phase suffersfrom a number of ambiguities which must be resolved priorto velocity estimation including directional ambiguities fromwraps of the ATI phase, blind velocities, and Doppler ambigui-ties due to sampling limitations in azimuth [23].
Along-track interferometric phase is generally computed inthe azimuth-compressed domain for improved SCRs. Derivingthe expressions for the azimuth-compressed signal returns fromthe fore and aft channels, where the reference filter has beenmatched to the quadratic term of the range equation only, wecan determine a closed-form expression for the ATI signal. Thefocused responses of a target (with 0) in thefore and aft channels from a reference filter matched only tothe second-order term are
(20)

142 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 44, NO. 1, JANUARY 2006
(21)
where and are the compressed signals from the foreand aft channels, respectively, is given in (12), in (14), and
in (15). The peak response of the fore channel occurswhen the argument of the sinc function goes to zero at time
, where
(22)
Applying (19), the ATI signal is then
ATI
(23)
Substituting (14) and (15) for and , respectively, and drop-ping the term (which is negligible), the ATI phase is givenas
ATI
(24)
Evaluated at its focused location from (22), the ATIphase becomes
ATI
(25)
Oftentimes, the ATI phase is approximated by the following ex-pression (e.g., [13], [14], [24], and [25]):1
ATI (26)
such that an estimate of can be computed directly giventhe interferometric phase, and the estimate is not dependentupon along-track velocity nor across-track acceleration .Note that if a reference filter perfectly matched to the linear and
1Where it is assumed that acceleration is zero, and that v � v and v �
v (1 � y =R ).
quadratic range equation terms is applied during azimuth com-pression, the target is imaged at broadside time (i.e., 0),and (24) reduces exactly to (26). However, generally is notknown a priori, and the objective is to estimate it using the ATIphase. In the presence of moderate and , (26) will beginto degrade if the target data are focused using a filter mismatchedto the linear coefficient. As well, note that if or other motioncomponents shift the target’s Doppler centroid such that there isno spectral overlap of the target signal with the reference filter,there will be no target peak and the ATI phase cannot be found.
The accuracy of (26) is verified using simulations for various, , and . The SAR signals are determined using (1)
to compute the fore channel range history, and (30) and (34)to compute the aft channel range history, which make use ofthe far-field approximation only. Additional simulations usingnonzero along-track acceleration and across-track accelera-tion rate are also conducted, as well as simulations of targetsignals in the presence of clutter and additive noise. The influ-ence of these parameters on the ATI phase and on the estimationof across-track velocity for an airborne simulation (with radarand geometry parameters given in Table I) is described. The es-timated across-track velocity is denoted .
A. Variation in ATI Phase With
As can be seen from (25), will influence the ATI phase.The amount it will shift the ATI phase is dependent both uponthe value of and the across-track velocity . Examining thetheoretical expression for the ATI phase in (25), the bias causedby ignoring the dependence increases indefinitely with in-creasing and . However, this equation does not take intoaccount wrapping of the spectrum due to a finite azimuth band-width. The focused image location used to derive (25) canonly fall between and (twice the original signal length dueto the convolution operation), and thus the error in ATI phasedue to ignoring the component will not increase indefinitely.
Examining the differences between the simulated ATI phaseand that determined from (26) for only those target signals withsome spectral overlap with the reference signal, it is found thatthe maximum bias for m/s and
m/s (scanned in steps of 1 m/s) is 21.7 or 1.2 m/s. Thefocused image location is determined after ATI as the point atwhich the ATI magnitude is maximum, since the ATI magnitudeis determined by the multiplication of two relatively narrow sincfunctions [see (23)]. When a reference filter perfectly matchedto is applied in compression, the bias in is negligible (forany ), and is due only to use of the far-field approximationand the Taylor series expansion of the range equation.
B. Variation in ATI Phase With
Similar to , nonzero will effect the ATI phase [seethe denominator of the second term in (25)]. Because ismultiplied by , even small accelerations such as 0.1 m/swill have a noticeable impact upon the phase. For example, for
0 m/s, 10 m/s and 0.1 m/s , the ATI phaseshifts 3.8 , creating an error of 0.2 m/s if an inversion of (26) isused to compute . This shift may be lessened or increased in

SHARMA et al.: INFLUENCE OF TARGET ACCELERATION ON VELOCITY ESTIMATION 143
Fig. 9. ATI signal for a = 1 m/s , v = 10 m/s (solid line) compared withthe expected ATI phase when the a dependence is neglected (dotted). Thereis a difference of 27.7 between the two phases, corresponding to an error of1.6 m/s in v̂ . Phase is given in degrees as an angle measured from the positivereal axis, and magnitude as a distance from the origin.
the presence of an along-track velocity depending the signs ofthe motion parameters; and of the same sign will reducethe overall shift, whereas values of opposite signs will increasethe shift in ATI phase. When more severe accelerations (but stillplausible) of 1 m/s are introduced, shifts of up to 36.6 (orbiases of 2.1 m/s in ) are present. Combined with shifts re-sulting from velocity, neglecting the contributions of tothe ATI phase can give erroneous estimates of . A polar plotof the ATI signal at time for a target with 1 m/sand 10 m/s (and all other motion parameters set to zero)is given in Fig. 9. Note the bias in the ATI phase computed using(26).
C. Variation in ATI Phase With and
Analytically, the ATI phase of a compressed target withnonzero and/or components cannot be computed inclosed form. However, we may examine the errors in using(26) to estimate in the presence of along-track acceler-ation and/or time-varying across-track acceleration throughsimulation.
Compared to and , and have a relatively smallimpact on the ATI phase. For varied from 1 to 1 m/s(scanned in steps of 0.1 m/s ), and varied from 30 to30 m/s (scanned in steps of 1 m/s), the maximum deviation from(26) was 2.4 , translating to a bias in of 0.14 m/s. Similarly,varying over 0.1 m/s gave a maximum deviation of 4.6or a bias of 0.26 m/s in . Thus, for the parameter ranges ex-amined, the effects of and on ATI phase are nearly anorder of magnitude lower than the influence of and .
D. Variation in ATI Phase in the Presence of Clutter
In addition to varying target dynamics, the influence of homo-geneous clutter on ATI phase was investigated through simula-tion. Correlated complex Gaussian clutter was simulated withan SCR of 0 dB before azimuth compression and a coherenceof 0.95, and additive noise was simulated with a CNR of 30 dB.
Fig. 10. ATI signals at each azimuth sample for targets with a = 0.5 m/sand v = 10 m/s. (Left) A deterministic target and (right) a target with additivenoise and complex Gaussian clutter are compared with the theoretical ATI phasewhen the a dependence is neglected (dotted). In this realization there is adifference of 4.2 between the phases of the peak ATI magnitudes with andwithout clutter, corresponding to a difference of 0.24 m/s in v̂ . The bias dueto neglecting the influence of a is approximately 17 or 1 m/s.
In 1000 realizations, the mean phase difference between thepeak ATI magnitudes with and without clutter was 0.1 witha standard deviation of 5.7 , corresponding to a negligible av-erage difference in computed across-track velocity , and astandard deviation of 0.3 m/s in . To illustrate the differencesbetween the deterministic target and the target plus clutter sce-narios, the ATI signals for one realization are plotted in Fig. 10.Note that all data points in the ATI signal (i.e., for all azimuthtimes) are plotted rather than only the peak ATI magnitude as inFig. 9. In the clutter simulation there is a concentration of clutterpoints about the real axis. Ideally, after coregistration the twoSAR channels are identical for stationary terrain (i.e., clutter)and their ATI signal should map to the real axis. However, dueto inevitable channel decorrelations, the clutter possess nonzeroATI phase and display a spread from the real axis in an ATIpolar plot. A keyhole filter may be used to remove interferingclutter by nulling the amplitudes of all signal components whosephases lie within a selected threshold [14], although this tech-nique poses a problem for slow-moving vehicles with a verysmall ATI phase or for vehicles traveling at speeds close to blindvelocities [22].
Another problem is that when target signals are superimposedupon clutter echoes, a bias is introduced in the ATI phase as afunction of the SCR of the received signal (this phenomenon isfurther described in [7]). In Fig. 10, this bias is approximately4 , corresponding to a difference of 0.24 m/s between the es-timated across-track velocity of the deterministic target and thetarget plus clutter cases. However, in this instance, the bias in theestimated across-track velocity due to clutter is still overshad-owed by the bias caused by neglecting the influence of acceler-ation; in Fig. 10 neglecting causes a bias of approximately1 m/s in in both simulations. Thus, even in the presenceof clutter and additive noise (which result in additional biasesto the ATI phase) significant across-track acceleration will biasthe ATI phase and will influence estimation of the across-trackvelocity.

144 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 44, NO. 1, JANUARY 2006
E. Obtaining an Unbiased Across-Track Velocity
The theoretical analysis and simulations outlined in Sec-tion IV reveal that if signal data are processed using a referencefilter perfectly matched to the target phase history (both tolinear and quadratic terms), the ATI phase reduces to a depen-dency on only. This suggests that to converge upon thecorrect , the ATI phase should first be computed using abank of reference filters initialized with the quadratic coeffi-cient giving the maximal magnitude response (for the highestSCR) and initialized with widely spaced velocities (toensure that some spectral overlap between the target signaland reference filter is obtained). With an initial approximationof across-track velocity obtained by solving (26) for , thetarget is recompressed using the estimated in the referencefilter and the ATI phase is recomputed. If the quality of theinitial approximation is reasonable and the ambiguities havebeen resolved (either using the target range walk, subbeampartitioning methods, or a priori knowledge of the approximatetarget motion), after several iterations this process will convergeupon the correct . Using this method, even significantor accelerations will not bias the estimated using the ATIphase.
Alternatively, an ATI phase dependent only upon the mo-tion parameter can also be derived by extending the length ofthe reference filter past the 3-dB synthetic aperture length. Ifthis reference filter is matched to the quadratic coefficient ofthe target range history, and if it is sufficiently extended in time,there will be complete spectral overlap between the target signaland the reference filter, and the ATI phase may be reduced to(26). However, in the presence of clutter, extending the refer-ence filter introduces additional clutter contamination into thephase estimate, and thus despite the added computational costof carrying out multiple correlations, the algorithm suggested inthe previous paragraph is preferred for estimating .
F. Experimental Results for Estimation
Across-track velocity was estimated for each control targetextracted from the Petawawa 2000 data using along-track inter-ferometric phase. A description of this dataset and the experi-mental setup was provided in Section III-E. An outline of the
estimation algorithm is provided below, followed by a com-parison of the across-track velocity estimates from ATI to GPSvelocities.
To obtain , first an estimate of along-track velocity isdetermined using the filterbank method from Section III. Thetarget track is then azimuth compressed using this in thereference filter to obtain focused responses for the fore and aftchannels. The ATI signal is computed and then smoothed usinga one-dimensional moving average filter to reduce noisy peaks.The local maxima in the ATI magnitude are extracted, normal-ized, and then weighted by the absolute value of their phase(which varies from to ), with the highest weight given tothose points furthest away from the zero-phase clutter region inorder to reduce clutter contamination.
The maximum after weighting gives the best estimate of theATI phase of the target. The phase is then unwrapped to fall
TABLE IIICOMPARISON OF ACROSS-TRACK VELOCITIES (v ) ESTIMATED
USING ALONG-TRACK INTERFEROMETRIC PHASE FROM
DUAL-CHANNEL SAR DATA AND GPS
between 0 and , and its phase shift is translated into across-track velocity using an inversion of (26)
ATI (27)
A second although less accurate estimate of is then deter-mined from the target range walk in order to resolve the -wrapambiguity in the ATI phase.
This algorithm was applied to each target track in the exper-imental dataset to estimate . The across-track velocities foreach pass determined using ATI phase and their velocities asmeasured using GPS are presented in Table III. Standard devia-tions in the GPS target heading and velocity magnitudes projectworst case accuracies of 0.5 m/s in the GPS estimates.

SHARMA et al.: INFLUENCE OF TARGET ACCELERATION ON VELOCITY ESTIMATION 145
The mean of the absolute value of the differences betweenATI and GPS estimates was 0.9 m/s, with a standard devia-tion of 1.5 m/s. The mean falls well within the standard devia-tion, and thus no overall bias in the measurements is suspected.There are three outliers (l1p5, l1p9, and l3p3 Convoy passes)which have significantly worse accuracies than the rest of the
estimates. These errors could be due to a poor estimate oftarget range walk resolving to an incorrect ambiguity, asym-metric target tracks (i.e., not centered about broadside time,which is examined in [11]), or contamination of the ATI phaseby other moving vehicles in the convoy.
The standard deviation of 1.5 m/s is slightly higher than thatpredicted in [26] for an airborne scenario. However, the theo-retical estimation took only phase decorrelation due to additivenoise into account; speckle, time decorrelation (such as internalclutter motion), and imperfect channel balancing may also con-tribute to ATI phase variations affecting estimation.
The results of across-track velocity estimation in experi-mental data are in general agreement with the conclusionsfrom the ATI theory and simulations examined. As predictedfrom the theoretical analysis, the suspected presence of targetacceleration does not introduce significant biases intoestimated from along-track interferometric phase. The meanof the absolute errors was only 0.9 m/s, which is more thana threefold improvement over the mean error in for thesame targets examined in Section III-E. A simple algorithmwas used to estimate that did not extend the referencefilter length or apply a bank of reference filters initialized withvarious velocities as was suggested in Section IV-E. It isfortunate that some amount of spectral overlap between thetarget and reference signals was present for each pass, and thusthe filterbank method was not required for this dataset. Perhapseven more accurate estimates of could be obtained usingiteration or extended reference filters.
V. CONCLUSION
The influence of acceleration on the estimation of the velocityvector has been examined using a combination of theory, simu-lations, and experimental data. A 2-D search for the maxima ina bank of reference filters and along-track interferometric phasewere presented as possible methods of estimating the along- andacross-track velocities of a moving target, respectively.
Both along- and across-track acceleration components mayhave a severe effect on the estimation of along-track velocity.Across-track acceleration severely biases the estimateif it is assumed that targets are traveling at a constant velocity.If acceleration is acknowledged as an additional unknown, thenthere are insufficient degrees of freedom to solve for all param-eters. Along-track acceleration and time-varying across-track acceleration also effect estimation by smearingthe target energy across multiple cells in the filterbank map andintroducing a slight bias in the location of the peak response. Bi-ases and smearing in the filterbank maps from experimental air-borne dual-channel SAR data are consistent with these theoret-ical and simulated results. More direct support of the hypothesesrequires knowledge of target acceleration time histories, which
may determined in future experiments using a higher samplingrate of the GPS data and/or inertial sensors.
The relation between ATI phase and the , , and mo-tion parameters was derived for a target compressed with a ref-erence filter matched to the quadratic term. If processed usinga reference filter perfectly matched to the target phase history(both to linear and quadratic terms), the ATI phase reduces toa dependency on only, and the across-track velocity maybe determined without bias. If the linear term in the referencefilter is not matched however, biases of up to several meters persecond for accelerations of 1 m/s and velocities of 30 m/smay be observed in . Estimation algorithms in which the ATIphase computation is iterated or the reference filter length is ex-tended beyond one synthetic aperture were suggested as meansof obtaining a more accurate estimate of across-track velocity.
A. Estimating Velocity in a Spaceborne Geometry
Although this paper focused on the influence of target ac-celeration on airborne geometries, velocity estimation from aspace-based radar geometry has also been considered in [22].While estimation of from airborne SAR is sensitive to accel-eration effects, target acceleration in data collected from space-borne systems (such as the future RADARSAT-2 sensor) is notas critical due to scale changes in geometry, a shorter syntheticaperture time, and increased noise. These factors decrease theinfluence of an uncompensated cubic term in the target rangehistory. However, even in spaceborne systems, uncompensated
will significantly bias the along-track velocity estimate. Therelation between ATI phase and across-track velocity from aspace-based radar geometry was also investigated. It was foundthat for the velocities and accelerations experienced by realisticground-based vehicles, the ATI phase may be used directly toestimate , without the need for iteration or extended matchedfilters.
APPENDIX
Beginning from the airborne radar–target geometry describedin Section II-A and the range equation from (2), the range his-tory to the fore and aft antennae are derived.
Let the difference between the range from the target to thefore antenna and the range from the target to the aft antenna be
. Thus, let
(28)
where from trigonometry
(29)
where is the angle between the antenna–target line of sightand the flight direction (i.e., the axis). The directional cosine
may be written as a function of the range andthe separation in the direction between the target and fore an-tenna of the radar platform . Thus, the range differencebecomes
(30)

146 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 44, NO. 1, JANUARY 2006
where higher order acceleration terms are assumed to benegligible.
Performing a Taylor expansion of about 0 to thefirst order simplifies the expression to the following:
(31)
where is the range to the target at broadside time 0 and0 0 . Plugging (31) into (28) gives (4) of
Section II-B.The majority of GMTI detection and estimation algorithms
require a resampling of the data such that the antenna phase cen-ters are coincident for consecutive sampling times. The effectiveantenna phase center is determined by the two-way range to thetarget. Since the fore antenna both transmits and receives, thetwo-way range is simply twice the range equationpreviously derived
(32)
However, the aft aperture, which is receive-only, receives radarpulses transmitted from the fore aperture, such that the two-wayrange is
(33)
For any sampled time available in the fore channel, the rangeto the target at time must be determined for theaft data in order to line up the channels. Thus, the registered aftchannel can be expressed as
(34)
Using the third-order Taylor expansion for (2) and theTaylor expansion for (31) this may be rewritten as
(35)
Rearranging (35), we can express as a function of, with leftover terms represented by
(36)
where
(37)
and
(38)
ACKNOWLEDGMENT
The authors would like to thank the GMTI group at DefenceResearch Development Canada (DRDC) Ottawa, particularly toI. Sikaneta and C. Livingstone for their guidance and advice.
REFERENCES
[1] P. Rosen, S. Hensley, I. Joughin, F. Li, S. Madsen, E. Rodrigueza, andR. Goldstein, “Synthetic aperture radar interferometry,” Proc. IEEE, vol.88, no. 3, pp. 333–382, Mar. 2000.
[2] C. H. Gierull and I. C. Sikaneta, “Raw data based two-aperture SARground moving target indication,” in Proc. IGARSS, vol. 2, Jul. 21–25,2003, pp. 1032–1034.
[3] I. Sikaneta and C. H. Gierull, “Ground moving target detection for along-track interferometric SAR data,” presented at the IEEE Aerospace Conf.,vol. 4, Big Sky, MT, Mar. 6–13, 2004, pp. 2227–2235.
[4] S. Barbarossa, “Detection and imaging of moving objects with syn-thetic aperture radar. Part 1. Optimal detection and parameter estimationtheory,” Proc. Inst. Elect. Eng. F, Radar Signal Process., vol. 139, no. 1,pp. 79–88, Feb. 1992.
[5] M. Soumekh and B. Himed, “Moving target detection and imaging usingan X-band along-track monopulse SAR,” IEEE Trans. Aerosp. Electron.Syst., vol. 38, no. 1, pp. 315–333, Jan. 2002.
[6] J. Ender, “Detection and estimation of moving target signals by mul-tichannel SAR,” AEÜ Int. J. Electron. Commun., vol. 50, no. 2, pp.150–156, 1996.
[7] C. H. Gierull, “Moving target detection with along-track SAR interfer-ometry—A theoretical analysis,” Defence Research and Development,Ottawa, ON, Canada, Tech. Rep. TR 2002-084, Aug. 2002.
[8] M. Kirscht, “Detection and imaging or arbitrarily moving targets withsingle-channel SAR,” Proc. Inst. Elect. Eng., Radar, Sonar Navigat., vol.150, no. 1, pp. 7–11, Feb. 1996.
[9] V. Chen, “Detection of ground moving targets in clutter with rotationalWigner-Radon transforms,” in Proc. Eur. Synthetic Aperture RadarConf. (EUSAR), Cologne, Germany, Jun. 4–6, 2002, pp. 229–232.
[10] D. J. Coe and R. G. White, “Experimental moving target detection resultsfrom a three-beam airborne SAR,” AEÜ Int. J. Electron. Commun., vol.50, no. 2, pp. 157–164, 1996.
[11] C. H. Gierull and I. Sikaneta, “Ground moving target parameter estima-tion for two-channel SAR,” presented at the Proc. Eur. Synthetic Aper-ture Radar Conf., Ulm, Germany, May 25–27, 2004.
[12] MDA, “RADARSAT-2: A new era in remote sensing,” MacDonaldDettwiler and Associates Ltd., Richmond, BC, Canada, 2004. [Online].Available: Available: http://www.mda.ca/radarsat-2.
[13] V. Pascazio, G. Schirinzi, and A. Farina, “Moving target detection byalong-track interferometry,” in Proc. IGARSS, vol. 7, Sydney, Australia,Jul. 9–13, 2001, pp. 3024–3026.
[14] C. Livingstone, I. Sikaneta, C. Gierull, S. Chiu, A. Beaudoin, J. Camp-bell, J. Beaudoin, S. Gong, and T. Knight, “An airborne synthetic aper-ture radar (SAR) experiment to support RADARSAT-2 ground movingtarget indication (GMTI),” Can. J. Remote Sens., vol. 28, no. 6, pp.794–813, 2002.
[15] M. Soumekh, “Moving target detection in foliage using along trackmonopulse synthetic aperture radar imaging,” IEEE Trans. ImageProcess., vol. 6, no. 8, pp. 1148–1163, Aug. 1997.
[16] R. K. Raney, “Synthetic aperture imaging radar and moving targets,”IEEE Trans. Aerosp. Electron. Syst., vol. AES-7, no. 3, pp. 499–505,May 1971.

SHARMA et al.: INFLUENCE OF TARGET ACCELERATION ON VELOCITY ESTIMATION 147
[17] W. Rieck, “Zeit-frequenz-signal-analyze für radaranwendungen mitsynthetischer apertur (SAR),” Ph.D. dissertation, Rheinisch-West-fälische Technische Hochschule Aachen, Shaker Verlag, Aachen,Germany, 1998.
[18] R. K. Raney, “Considerations for SAR image quantification unique toorbital systems,” IEEE Trans. Geosci. Remote Sens., vol. 29, no. 5, pp.754–760, May 1991.
[19] C. H. Gierull and C. Livingstone, “SAR-GMTI concept forRADARSAT-2,” in The Applications of Space-Time Processing,R. Klemm, Ed. Stevenage, U.K.: IEE Press, 2004.
[20] M. Pettersson, “Extraction of moving ground targets by a bistatic ultra-wideband SAR,” in Proc. Inst. Elect. Eng., Radar, Sonar Navigat., vol.148, Feb. 2001, pp. 35–49.
[21] G. Franceschetti and R. Lanari, Synthetic Aperture Radar Pro-cessing. Boca Raton, FL: CRC, 1999.
[22] J. J. Sharma, “The influence of target acceleration on dual-channel SAR-GMTI (synthetic aperture radar ground moving target indication) data,”M.S. thesis, Univ. Calgary, Calgary, AB, Canada, Oct. 2004.
[23] C. Livingstone and I. Sikaneta, “Focusing moving targets/terrain im-aged with moving-target matched filters: A tutorial,” Defence Researchand Development, Ottawa, ON, Canada, Tech. Rep. TM-2004-160, Sep.2004.
[24] A. Moccia and G. Rufino, “Spaceborne along-track SAR interferometry:Performance analysis and mission scenarios,” IEEE Trans. Aerosp. Elec-tron. Syst., vol. 37, no. 1, pp. 199–213, Jan. 2001.
[25] H. Breit, M. Eineder, J. Holzner, H. Runge, and R. Bamler, “Syntheticaperture imaging radar and moving targets,” in Proc. IGARSS, vol. 2,Toulouse, France, Jul. 2003, pp. 1187–1189.
[26] A. Thompson and C. Livingstone, “Moving target performance forRADARSAT-2,” in Proc. IGARSS, vol. 6, Honolulu, HI, Jul. 24–28,2000, pp. 2599–2601.
Jayanti J. Sharma received the B.Sc. and M.Sc. de-grees in geomatics engineering from the Universityof Calgary, Calgary, AB, Canada, in 2002 and 2005,respectively. She is currently pursuing the Ph.D.degree in electrical engineering at the Universityof Karlsruhe, Karlsruhe, Germany, and the Instituteof Radio Frequency Technology at the GermanAerospace Center (DLR), Oberpfaffenhofen, underthe supervision of Dr. A. Moreira.
Her research was part of a joint project betweenthe University of Calgary and Defence Research and
Development Canada–Ottawa. Her research interests include radar signal pro-cessing, ground moving-target detection, and estimation, and polarimetric inter-ferometric synthetic aperture radar.
Christoph H. Gierull (S’94–M’95–SM’02) re-ceived the Dipl.-Ing. and the Dr.-Ing. degrees inelectrical engineering from the Ruhr-UniversityBochum, Bochum, Germany, in 1990 and 1995,respectively.
From 1991 to 1994, he was a Scientist with theElectronics Department, German Defence ResearchEstablishment (FGAN), Wachtberg, Germany.From 1994 to 1999, he was the Head of the SARsimulation group at the Institute of Radio FrequencyTechnology, German Aerospace Center (DLR),
Oberpfaffenhofen, Germany. In 2000, he joined the Radar Systems Section,Defence R&D Canada-Ottawa (DRDC Ottawa), Ottawa, ON, Canada, as aDefence Scientist. In February 2000, he was an X-SAR Performance Engineeron the Shuttle Radar Topography Mission’s operations team at the JohnsonSpace Center, Houston, TX. His work concentrates on various aspects of radar(array) signal processing, including adaptive jammer suppression, space-timeadaptive processing, superresolution, and airborne and spaceborne SAR incombination with MTI as well as bistatic SAR.
Dr. Gierull received the Paper Prize Award of the Information Technology So-ciety (ITG) of the Association of German Electrical Engineers (VDE) in 1998.
Michael J. Collins (S’87–M’93–SM’00) receivedthe B.Sc.Eng. degree in survey engineering fromthe University of New Brunswick, Fredericton, NB,Canada, the M.Sc. degree in physical oceanographyfrom the University of British Columbia, Vancouver,BC, Canada, and the Ph.D. in earth and spacescience from York University, Toronto, ON, Canada,in 1981, 1987, and 1993, respectively. His Ph.D.research was a theoretical and experimental analysisof the response of a synthetic aperture radar to seaice.
He is currently a Faculty Member in the Department of Geomatics Engi-neering, University of Calgary, Calgary, AB, Canada. He has also been a Fac-ulty Member with the Department of Survey Engineering, University of Maineand in the Department of Geodesy and Geomatics Engineering, University ofNew Brunswick; a Project Scientist with the Institute for Space and TerrestrialScience in Toronto, Canada, and an Engineer with the McElhanney Group inVancouver and Calgary. He has also served as a consultant to government andindustry on various aspects of remote sensing. He has research interests in sev-eral aspects of radar remote sensing, including simulation of signal data, textureanalysis, segmentation and classification, estimation of forest and sea-ice char-acteristics, and the fusion of radar with electro-optical and other geospatial data.