Embed Size (px)
Citation preview
1/25
An Infinite Automaton Characterization
of Double Exponential Time
Gennaro Parlato
University of Illinois at Urbana-ChampaignUniversità degli Studi di Salerno
Salvatore La Torre (U. Salerno) P. Madhusudan (U. Illinois U-C)
2/25
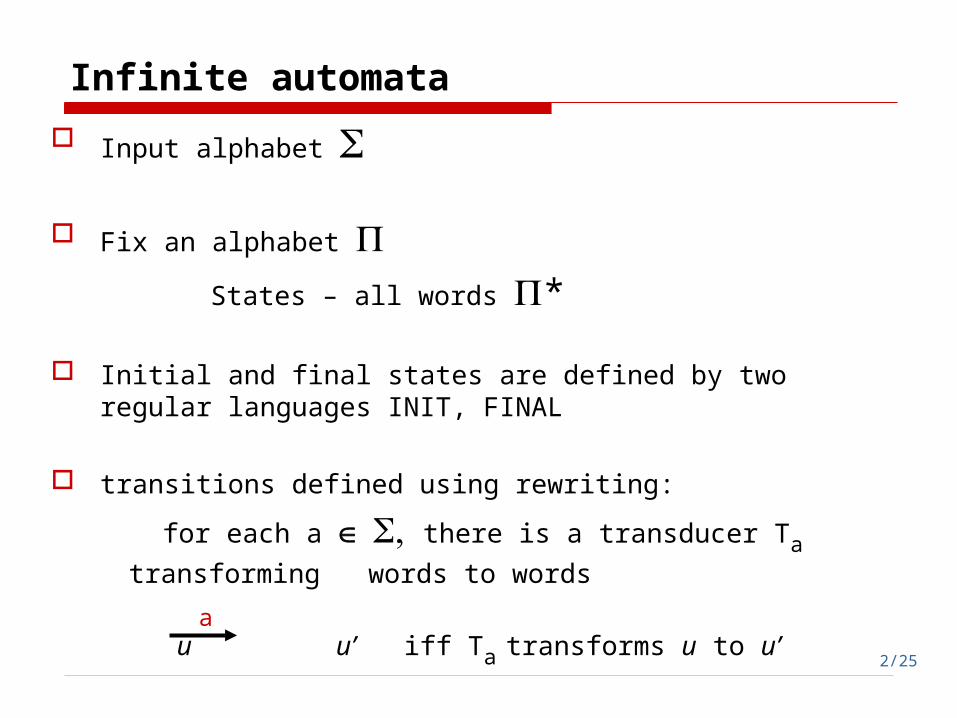
Infinite automata
Input alphabet
Fix an alphabet States – all words * Initial and final states are defined by two regular
languages INIT, FINAL
transitions defined using rewriting:
for each a there is a transducer Ta transforming
words to words
u u’ iff Ta transforms u to u’ a
3/25
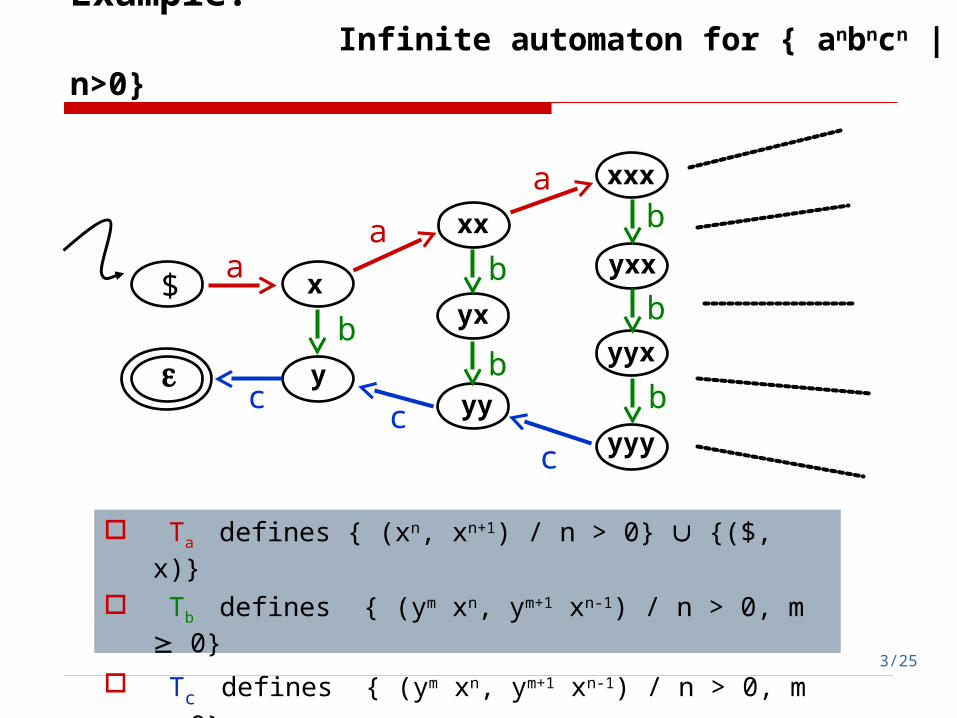
Example: Infinite automaton for { anbncn | n>0}
Ta defines { (xn, xn+1) / n > 0} {($, x)}
Tb defines { (ym xn, ym+1 xn-1) / n > 0, m 0}
Tc defines { (ym xn, ym+1 xn-1) / n > 0, m 0}
$ x
xx
xxx
yxx
yyx
yyy
yx
yyy
aa
a
b
b
b
b
b
b
cc
c
4/25
Infinite automata using regular trasducers
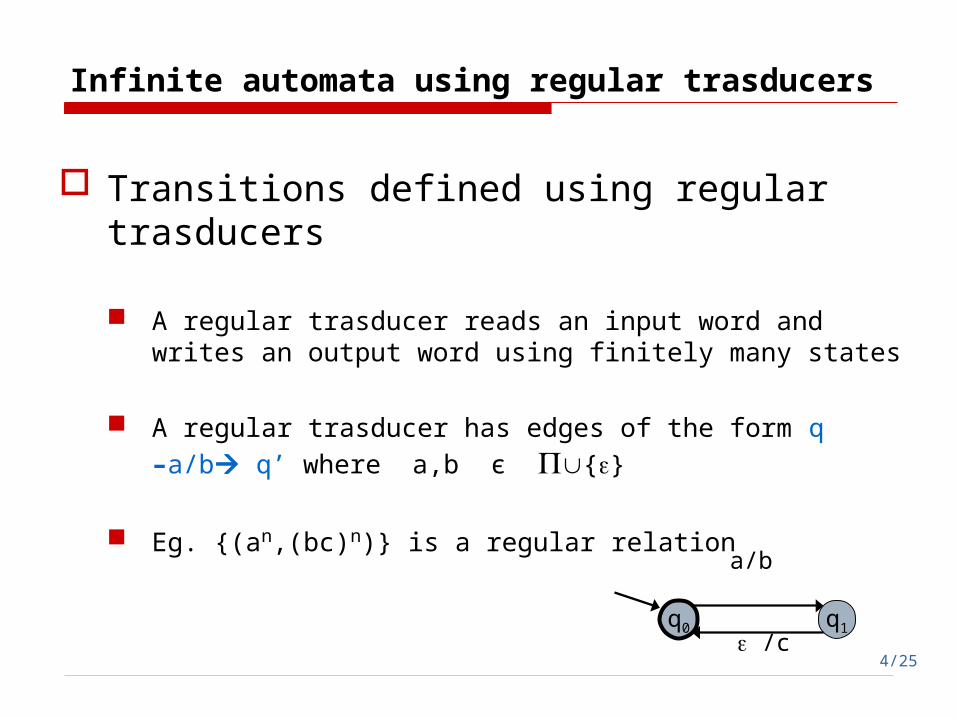
Transitions defined using regular trasducers
A regular trasducer reads an input word and writes an output word using finitely many states
A regular trasducer has edges of the form q –a/b q’ where a,b є {}
Eg. {(an,(bc)n)} is a regular relation
q0 q1
a/b
/c
5/25
Infinite automata & computational complexity
A remarkable theorem (Morvan-Stirling ’01)
Note: no ostensible bounds of time or space are placed on the machine!
Theorem Infinite automaton with regular transducers precisely definecontext-sensitive languages (i.e. NLINSPACE)
6/25
Infinite automata with pushdown transducers
Consider infinite automata with rewriting using pushdown automata
Pushdown transducer transform words to words using a finite-state control and a work-stack
Eg. {(an, bn cn) / n > 0 } can be effected (non regular relation)
Infinite automata with pushdown transducer relations define r.e. languages (undecidable)
7/25
Infinite automata with restricted pushdown transducers
Restricted pushdown transducers: Each transducer can switch between read the input
tape and popping the stack only a bounded number of times
Still powerful Eg. {(an, bn cn) / n > 0 } can still be effected
Theorem Infinite automata with restricted pushdown transducers define precisely the class 2ETIME ( in 22O(n)
time)
Note: Again, no ostensible space or time limits States on a run can run for a very long time A logical characterization of 2ETIME by restricting the power of
rewriting
8/25
Known results
Rational graphs capture Context-Sensitive Languages (Morvan-Stirling, 2001)
Synchronized rational graphs are sufficient to capture CSL’s (Rispal, 2002)
Term-automatic graphs capture ETIME (Meyer, 2007)
Prefix-recognizable graphs capture Context-Free Languages (Caucal, 1996)
Survey on Infinite Automata (Thomas, 2001)
9/25
Outline of the talk
Infinite automata
2ETIME Upper Bound
2ETIME Lower Bound
Conclusions
10/25
Upper Bound
Two steps:
1. (polynomial time) reduction ofmembership for infinite automata with restricted pushdown transducers
to emptiness for bounded-phase multi-stack pushdown
automata (k-MPA)
2. 2Etime solution of k-MPA emptiness Improvement of the 2|A| 2O(poly(k))
solution given in [LICS’07]
11/25
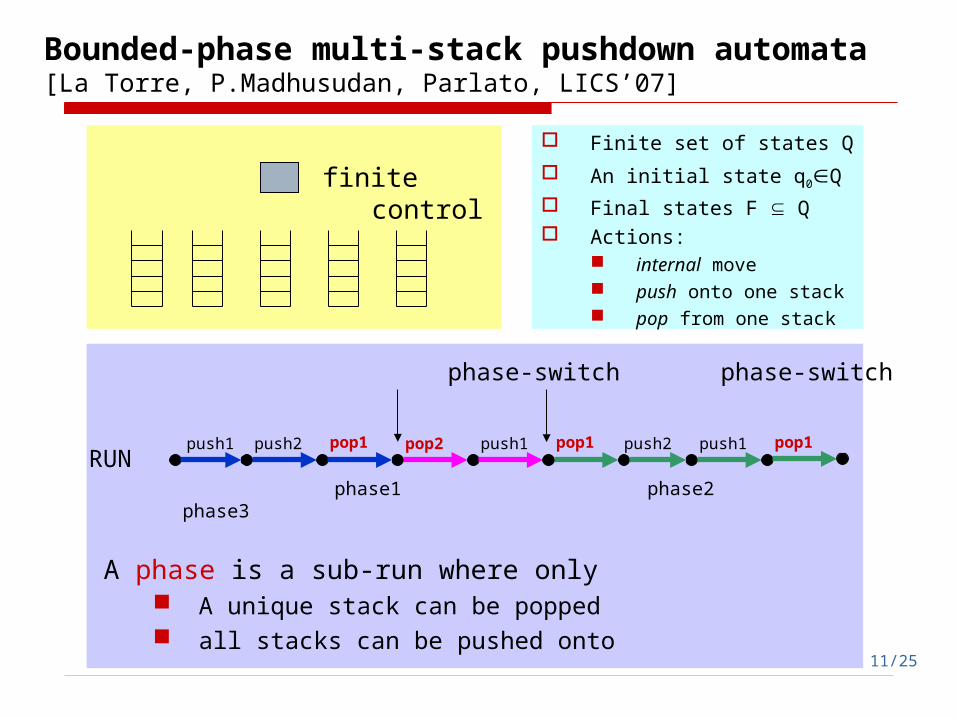
Bounded-phase multi-stack pushdown automata[La Torre, P.Madhusudan, Parlato, LICS’07]
finite control
A phase is a sub-run where only A unique stack can be popped all stacks can be pushed onto
Finite set of states Q
An initial state q0Q Final states F Q Actions:
internal move push onto one stack pop from one stack
phase-switch phase-switch
RUN phase1 phase2 phase3
push2push1 push2 pop1 pop2 push1 pop1 push1 pop1
12/25
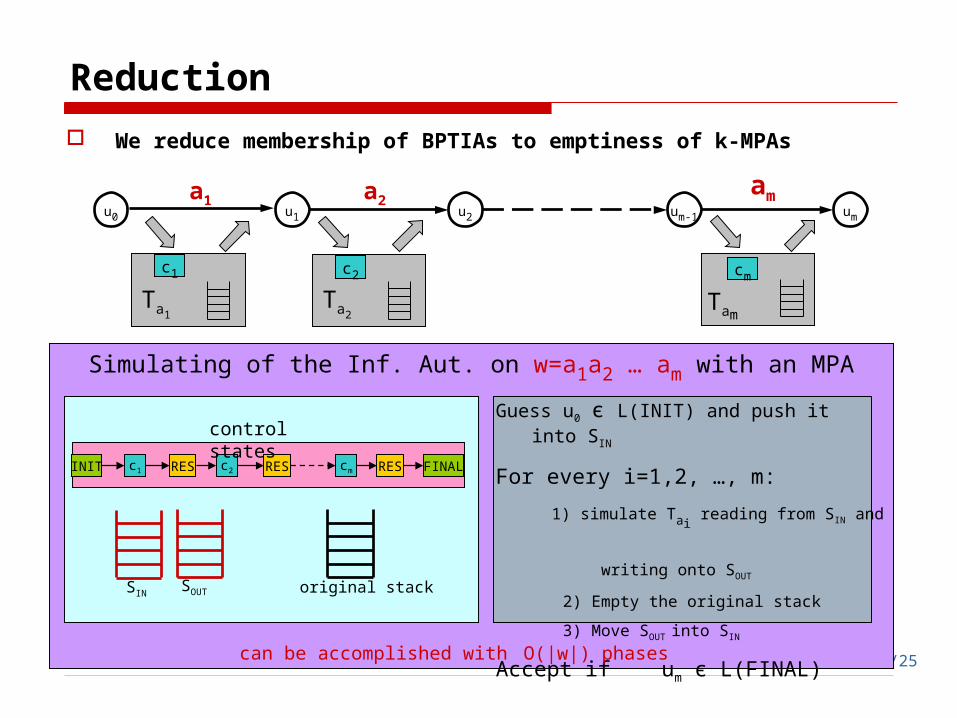
Simulating of the Inf. Aut. on w=a1a2 … am with an MPA
We reduce membership of BPTIAs to emptiness of k-MPAs
Reduction
a1u0 u1 umu2
a2um-1
am
c1
c1
Ta1
c2
Ta2
cm
Tam
c2 cmINIT FINALRES RES
original stackSIN SOUT
control states
RES
Guess u0 є L(INIT) and push it into SIN
For every i=1,2, …, m:
1) simulate Tai reading from SIN and
writing onto SOUT
2) Empty the original stack
3) Move SOUT into SIN
Accept if um є L(FINAL)can be accomplished with O(|w|) phases
13/25
Emptiness for k-MPAs
Reduction to emptiness of tree automata
The key idea is the use of Stack trees
14/25
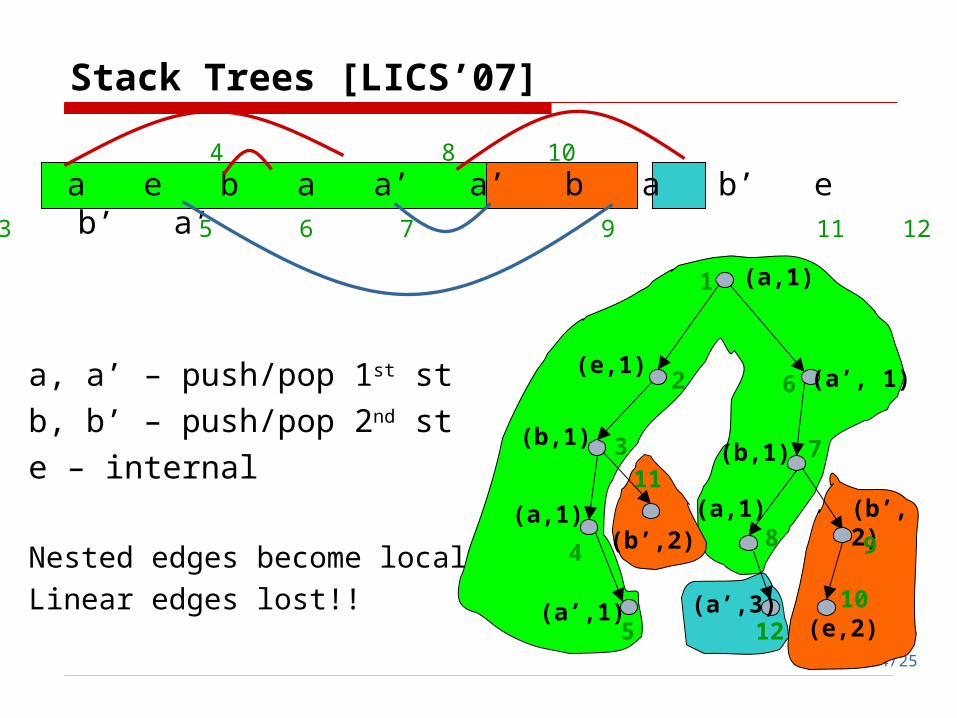
a e b a a’ a’ b a b’ e b’ a’
a, a’ – push/pop 1st stb, b’ – push/pop 2nd ste – internal
Nested edges become localLinear edges lost!!
Stack Trees [LICS’07]
(a’,1)
(a,1)
(e,1) (a’, 1)
(b,1)(b,1)
(a,1)
(a,1)
1
2
3
4
5
6
7
8
(a’,3)12
(b’,2)
11(b’,2)
(e,2)
9
10
8 104
1 2 3 5 6 7 9 11 12
15/25
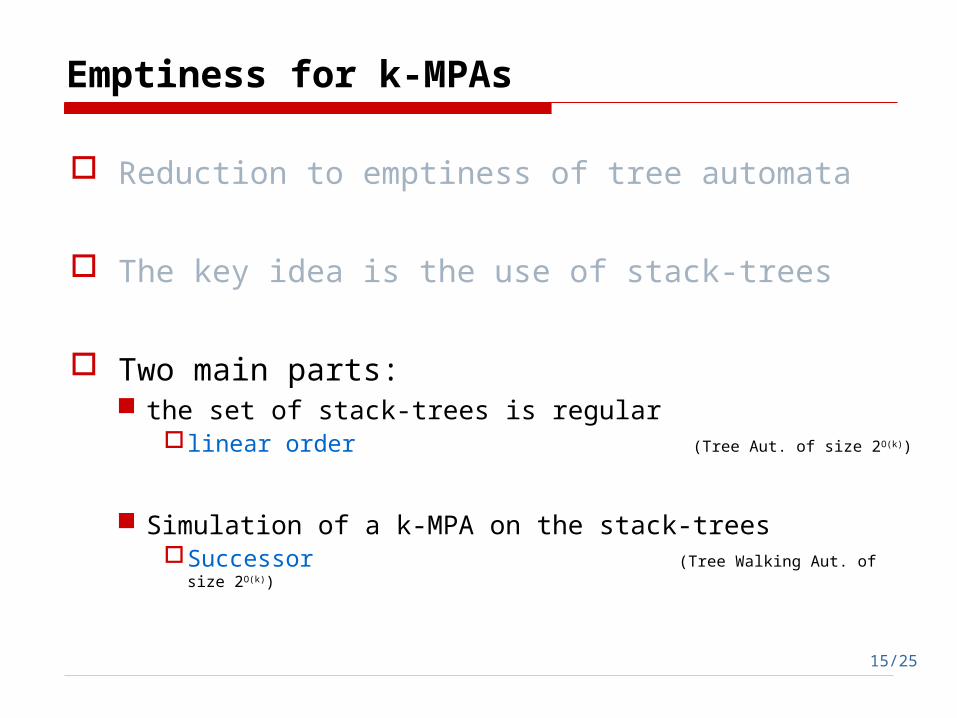
Emptiness for k-MPAs
Reduction to emptiness of tree automata
The key idea is the use of stack-trees
Two main parts: the set of stack-trees is regular
linear order (Tree Aut. of size 2O(k))
Simulation of a k-MPA on the stack-treesSuccessor (Tree Walking Aut. of size 2O(k))
16/25
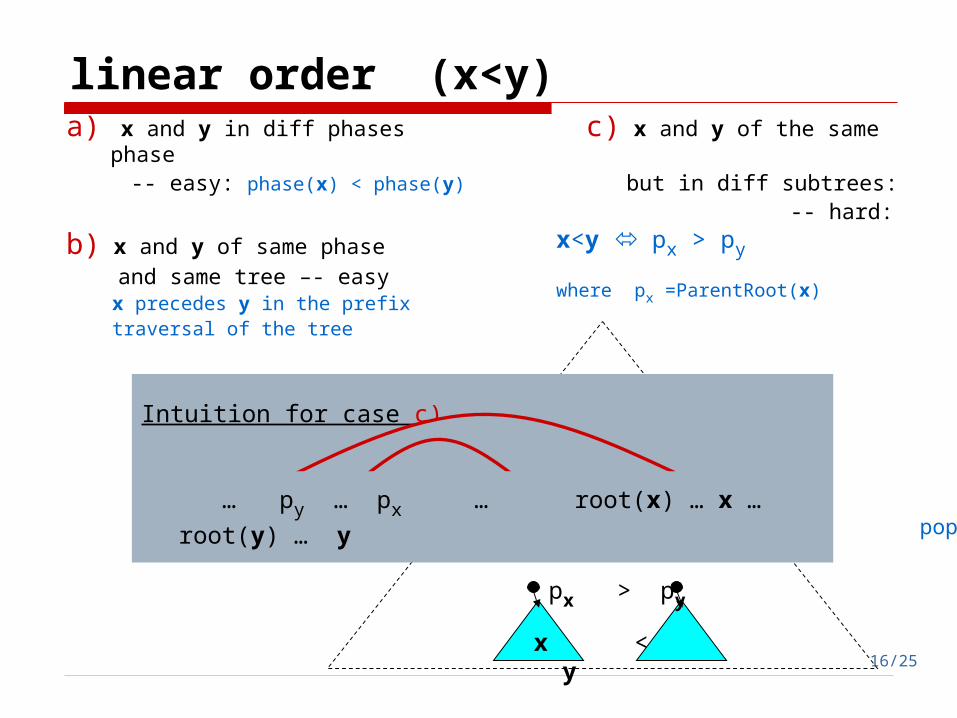
linear order (x<y)a) x and y in diff phases c) x and y of the same phase -- easy: phase(x) < phase(y) but in diff subtrees: -- hard:
b) x and y of same phase and same tree –- easy x precedes y in the prefix traversal of the tree
x<y px > py
where px =ParentRoot(x)
py= ParentRoot (y)
px > py
x < y
Intuition for case c)
push push pop pop … py … px … root(x) … x … root(y) … y
17/25
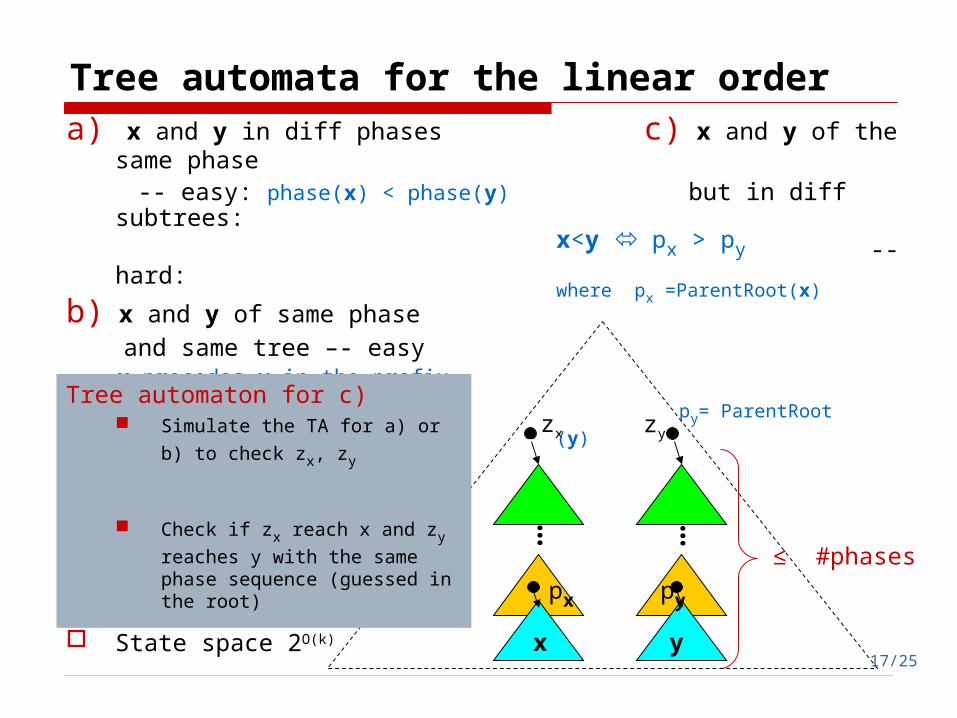
a) x and y in diff phases c) x and y of the same phase -- easy: phase(x) < phase(y) but in diff subtrees: -- hard:
b) x and y of same phase and same tree –- easy x precedes y in the prefix traversal of the tree
… …
zyzx
≤ #phases
Tree automata for the linear order
x y
Inductive definitionBase case : a) and b)Inductive step : c)
Tree automaton for c) Simulate the TA for a) or b) to
check zx, zy
Check if zx reach x and zy
reaches y with the same phase sequence (guessed in the root)
State space 2O(k)
px py
x<y px > py
where px =ParentRoot(x)
py= ParentRoot (y)
18/25
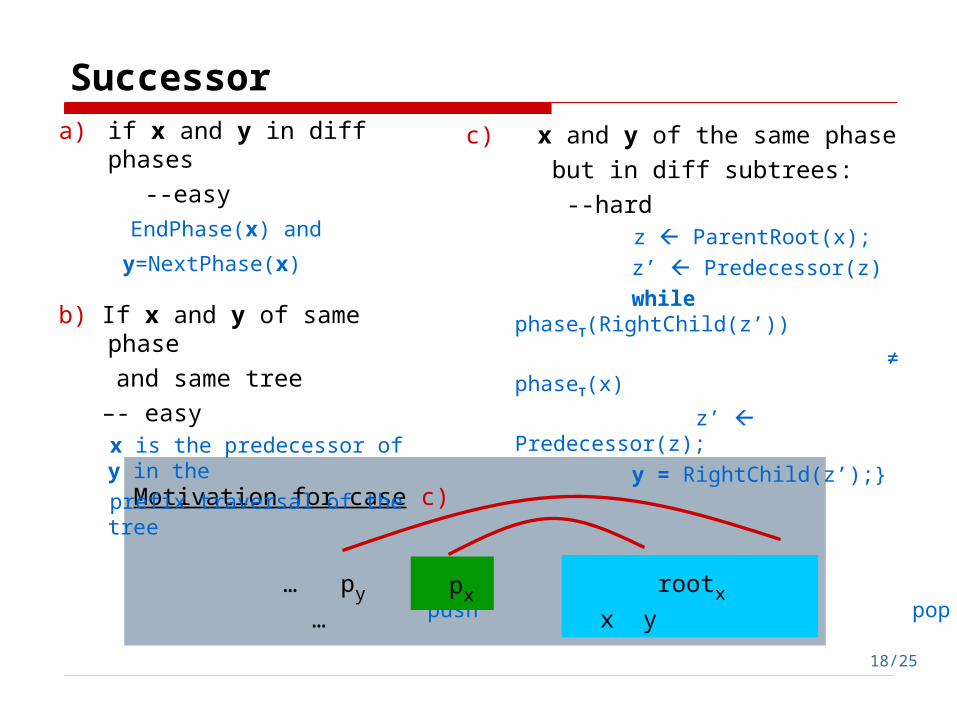
Successor
Motivation for case c)
push push pop pop rootx x y … py … … px
a) if x and y in diff phases --easy EndPhase(x) and
y=NextPhase(x)
b) If x and y of same phase and same tree –- easy x is the predecessor of y in the prefix traversal of the tree
c) x and y of the same phase but in diff subtrees: --hard z ParentRoot(x); z’ Predecessor(z) while phaseT(RightChild(z’))
≠ phaseT(x)
z’ Predecessor(z); y = RightChild(z’);}
19/25
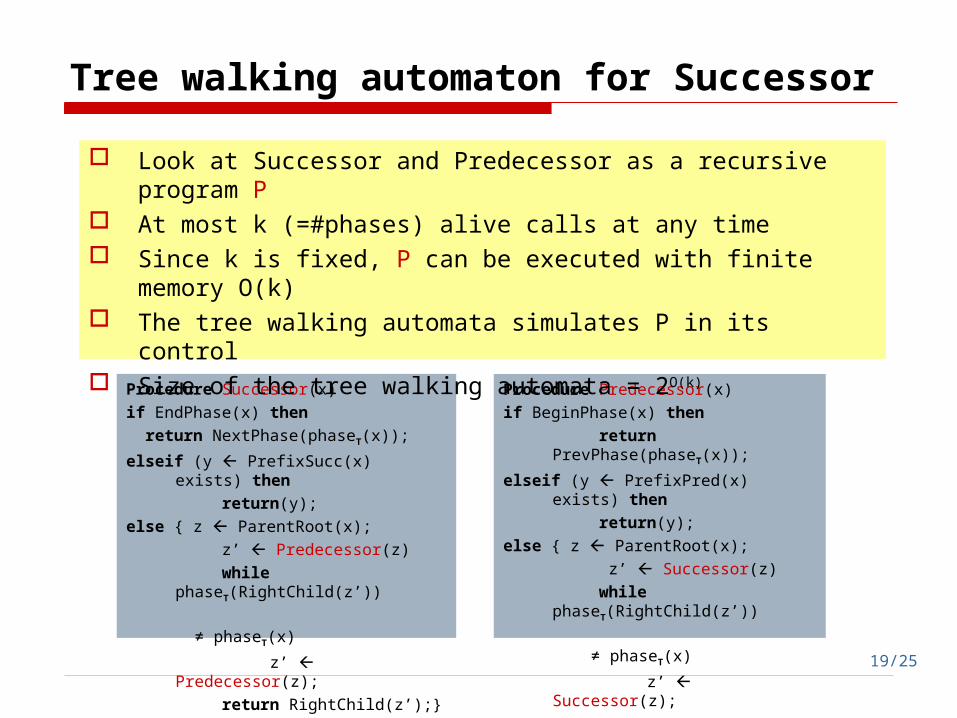
Tree walking automaton for Successor
Procedure Successor(x)if EndPhase(x) then return NextPhase(phaseT(x));
elseif (y PrefixSucc(x) exists) then return(y);else { z ParentRoot(x); z’ Predecessor(z) while phaseT(RightChild(z’))
≠ phaseT(x)
z’ Predecessor(z); return RightChild(z’);}
Procedure Predecessor(x)if BeginPhase(x) then return PrevPhase(phaseT(x));
elseif (y PrefixPred(x) exists) then return(y);else { z ParentRoot(x); z’ Successor(z) while phaseT(RightChild(z’))
≠ phaseT(x)
z’ Successor(z); return RightChild(z’);}
Look at Successor and Predecessor as a recursive program P At most k (=#phases) alive calls at any time Since k is fixed, P can be executed with finite memory O(k) The tree walking automata simulates P in its control Size of the tree walking automata = 2O(k)
20/25
Outline of the talk
Infinite automata
2ETIME Upper Bound
2ETIME Lower Bound
Conclusions
22/25
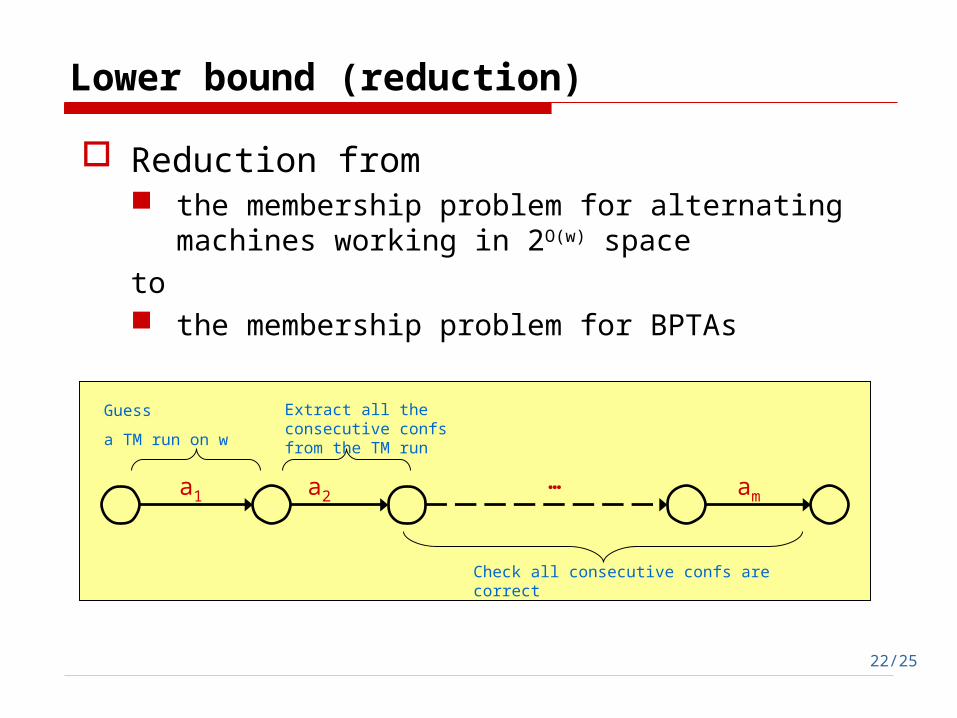
Lower bound (reduction)
Reduction from the membership problem for alternating
machines working in 2O(w) space to the membership problem for BPTAs
a1 am
Guess
a TM run on w
a2
…
Check all consecutive confs are correct
Extract all the consecutive confs from the TM run
23/25
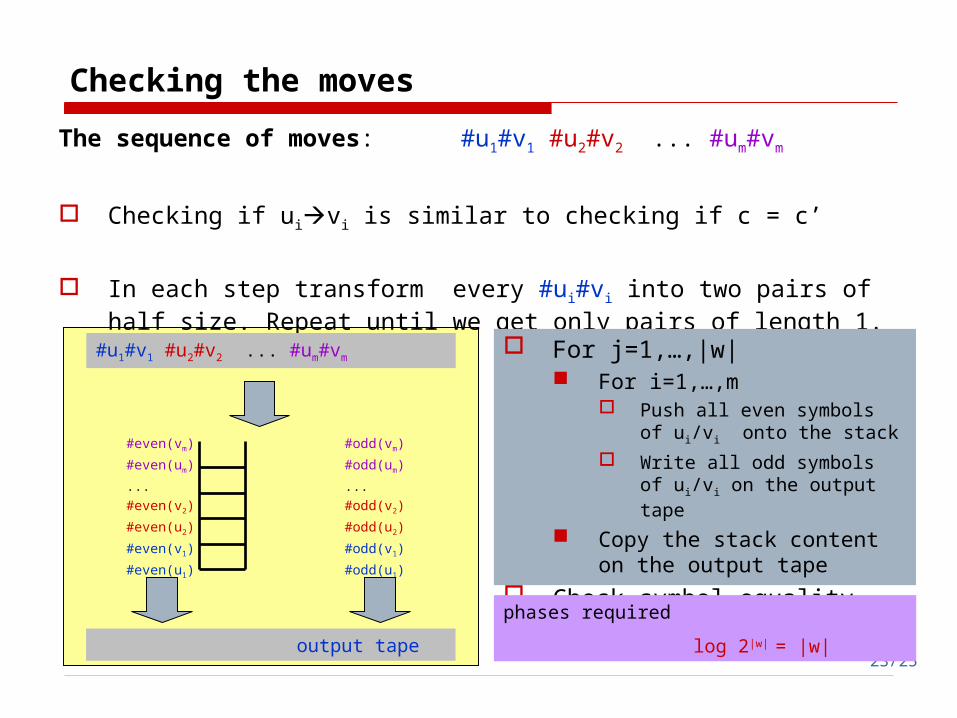
Checking the moves
The sequence of moves: #u1#v1 #u2#v2 ... #um#vm
Checking if uivi is similar to checking if c = c’
In each step transform every #ui#vi into two pairs of half size. Repeat until we get only pairs of length 1. (O(|w|) steps)
For j=1,…,|w| For i=1,…,m
Push all even symbols of ui/vi onto the stack
Write all odd symbols of ui/vi on the output tape
Copy the stack content on the output tape
Check symbol equality
#u1#v1 #u2#v2 ... #um#vm
#even(vm)
#even(um)
...#even(v2)
#even(u2)
#even(v1)
#even(u1)
#odd(vm)
#odd(um)
...#odd(v2)
#odd(u2)
#odd(v1)
#odd(u1)
output tape
phases required
log 2|w| = |w|
24/25
Outline of the talk
Infinite automata
2ETIME Upper Bound
2ETIME Lower Bound
Conclusions
25/25
Conclusions
Characterization of 2ETIME with infinite automata
Alternate characterizations of complexity classes using rewriting theory
Rewriting is classic (Thue, Post) but never applied to complexity theory
Exact computational complexity of the emptiness problem for bounded-phase multi-stack pushdown automata
26/25
Conclusions
Can we show alternate proofs of classic results using infinite automata? Eg. NL=co-NL
NLINSPACE= co-NLINSPACE…
Can we capture P or NP?
Expressive power of deterministic infinite automata










![Sistemi Peer To Peer (P2P) Avanzati Gennaro Cordasco Gennaro Cordasco cordasco[@]dia.unisa.it cordasco[@]dia.unisa.itcordasco[@]dia.unisa.it cordasco](https://img.pdfslide.us/doc/110x75/5542eb58497959361e8c2342/sistemi-peer-to-peer-p2p-avanzati-gennaro-cordasco-gennaro-cordasco-cordascodiaunisait-cordascodiaunisaitcordascodiaunisait-httpwwwdiaunisaitcordasco.jpg)