Embed Size (px)
Citation preview
Nash Equilibria in Distributed Systems
Mohamed G. Gouda & H. B. Acharya
Presenter
Aly FarahatPh.D. Student
Automatic Software Design Lab Computer Science Department
Michigan Technological University
10/14/2009 Automatic Software Design Lab 2
A Nash-Equilibrium is a property of stable states in a game. It means that no player should try to
perturb this state (make a move) from this point as it may decrease its gain
10/14/2009 Automatic Software Design Lab 3
Contents
• Definitions
• Characterization
• Taxonomy
10/14/2009 Automatic Software Design Lab 4
Definitions
10/14/2009 Automatic Software Design Lab 5
Nash Equilibrium
• OriginsConcepts from Game Theory
• GoalCharacterizing a state from which local actions
might eventually lead to no gain
10/14/2009 Automatic Software Design Lab 6
Terminology
• Stabilization: All distributed system computations are finite
• Fixed-Point: Termination state in a distributed computation (no processes are enabled)
• Equilibrium Point: Fixed-Point!
• Local Perturbation: Transitions on a process local states while in a Fixed-Point
10/14/2009 Automatic Software Design Lab 7
Gain Function
• A set G of local functions, one per process i
G={ g.i }
• g.i is defined only at equilibrium states and undefined elsewhere
10/14/2009 Automatic Software Design Lab 8
Nash Equilibrium
A Fixed-Point s is a Nash Equilibrium wrt {g.i} iff
For every process i, for every local perturbation, there exists a fixed-point s’
such that
g.i(s’)<= g.i(s)
10/14/2009 Automatic Software Design Lab 9
Intuitively
• In a Nash-Equilibrium s, no process i has the incentive to perturb its equilibrium as it might decrease its gain function.
• In a non Nash-Equilibrium ns, there exists a process j that would necessarily increase its local gain g.j by perturbing ( by a specific perturbation) its equilibrium.
10/14/2009 Automatic Software Design Lab 10
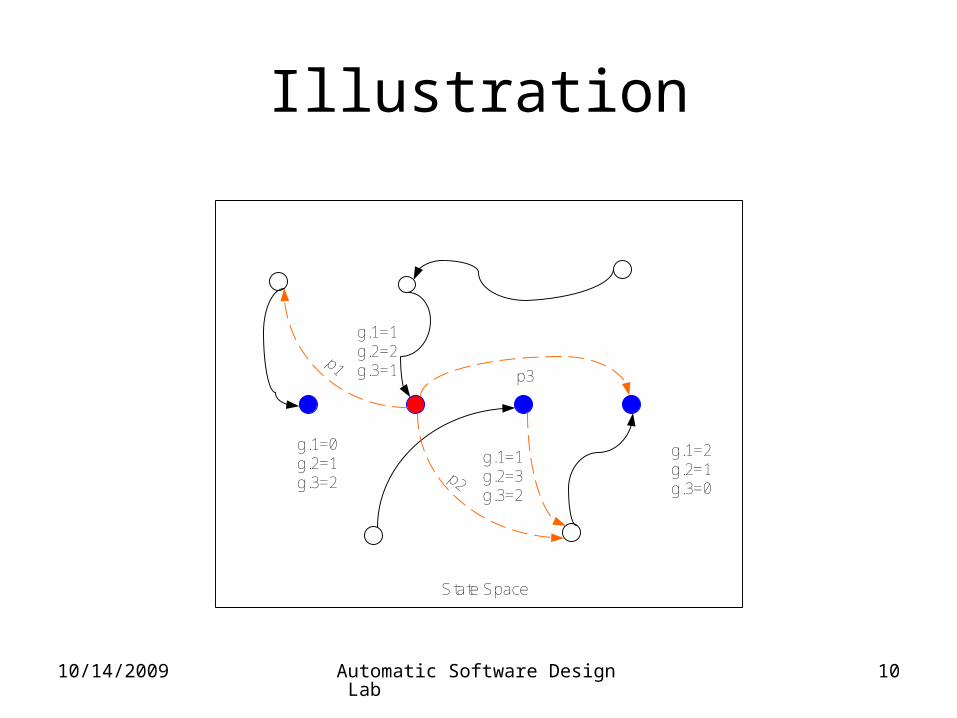
Illustration
g.1=0g.2=1g.3=2
g.1=1g.2=2g.3=1
g.1=1g.2=3g.3=2
g.1=2g.2=1g.3=0
p1
p2
State Space
p3
10/14/2009 Automatic Software Design Lab 11
Characterization of Nash Equilibria
10/14/2009 Automatic Software Design Lab 12
Sufficient Conditions
Theorem 1: s is a Nash Equilibrium wrt {g.i} if any of the
following is true:1- g.i has its maximum at s, for all i.
2- For every local perturbation pi from s there exists a stable state s’ reachable by the actions of i such that g.i(s’)<=g.i(s)
Why are these conditions unnecessary?
10/14/2009 Automatic Software Design Lab 13
Sufficient Conditions (Cont’d)
Theorem 2:
ns is not a Nash Equilibrium wrt { g.i } if:
There exists i with a second fixed point s’ directly reachable from s by a local perturbation of i.
Why this is not necessary?
10/14/2009 Automatic Software Design Lab 14
Absolute Nash Equilibrium(Sufficient Conditions)
Theorem 3:
s is a Nash Equilibrium w.r.t. any set of gain functions if:
For every i, for every perturbation pi the system has a local action that returns it to state s.
10/14/2009 Automatic Software Design Lab 15
Construction of Gain Functions
Theorem 4:
For any stabilizing distributed system:
a) A set of constant gain functions
{ g.i | g.i=ci } makes every fixed-point a Nash-Equilibrium
10/14/2009 Automatic Software Design Lab 16
Construction of Gain Functions (Cont’d)
Theorem 4(b):
For any stabilizing distributed system:
If there are two fixed points, s and s’, different only in one local variable of process j. We can make s’ a non-Nash Equilibrium by forcing a local perturbation from s’ to s with g.j(s’)<g.j(s)
10/14/2009 Automatic Software Design Lab 17
Taxonomy based on Nash Equilibira
10/14/2009 Automatic Software Design Lab 18
• Relatively Perturbation-Proof Systems
• Relatively Perturbation-Prone Systems
• Absolutely Perturbation-Proof Systems
• Absolutely Perturbation-Prone Systems (empty)
10/14/2009 Automatic Software Design Lab 19
• A stabilizing system is relatively perturbation-proof iff:
– There exists S={ g.i } such that every fixed-point is a Nash Equilibrium w.r.t S
Relatively Perturbation-Proof
10/14/2009 Automatic Software Design Lab 20
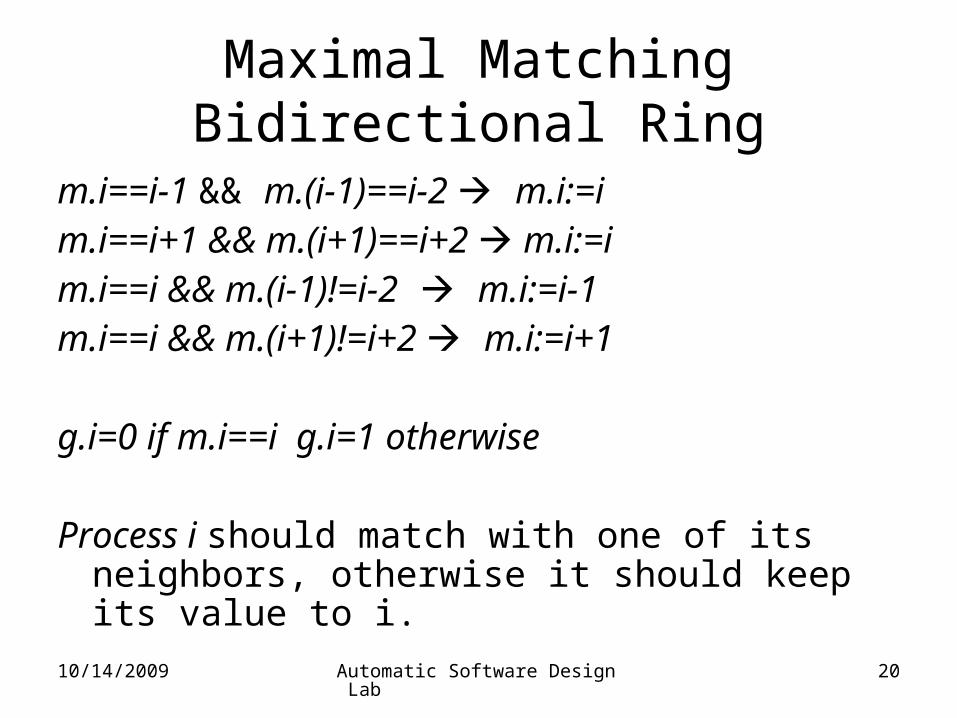
Maximal Matching Bidirectional Ring
m.i==i-1 && m.(i-1)==i-2 m.i:=im.i==i+1 && m.(i+1)==i+2 m.i:=im.i==i && m.(i-1)!=i-2 m.i:=i-1m.i==i && m.(i+1)!=i+2 m.i:=i+1
g.i=0 if m.i==i g.i=1 otherwise
Process i should match with one of its neighbors, otherwise it should keep its value to i.
10/14/2009 Automatic Software Design Lab 21
Nash Equilibrium of Matching
• If m.i !=i, and m.i is a fixed-point, then g.i=1. This is a maximum! From theorem 1(a), it is a Nash-Equilibrium
• If m.i==i, g.i=0. But no perturbation will break a match, hence, m.i == i is restablished.
• “Bidirectional Matching” is relatively perturbation proof
10/14/2009 Automatic Software Design Lab 22
Relatively-Perturbation Prone
• A stabilizing system is relatively perturbation-prone iff:
– There exists S={ g.i } such that some fixed-point is a non-Nash Equilibrium w.r.t S
– Use Theorem 4(b) to design such systems
10/14/2009 Automatic Software Design Lab 23
Absolutely Perturbation-Proof
• A stabilizing system is absolutely perturbation-proof iff:
– For every S={ g.i }, every fixed-point is a Nash Equilibrium w.r.t S
– Use Theorem 3 to design such systems
10/14/2009 Automatic Software Design Lab 24
A subclass of absolutely perturbation proof systems
Theorem 5:
If a stabilizing system has only one fixed-point, it is absolutely-perturbation proof
Why?
10/14/2009 Automatic Software Design Lab 25
Absolutely Perturbation-Prone
• A stabilizing system is absolutely perturbation-prone iff:
– For every S={ g.i }, there exists a non-Nash Equilibrium fixed-point w.r.t S
– Use Theorem 4(a) to show that no such system exists: we can always construct a set of gain functions to make every fixed-point a Nash-Equilibrium
10/14/2009 Automatic Software Design Lab 26
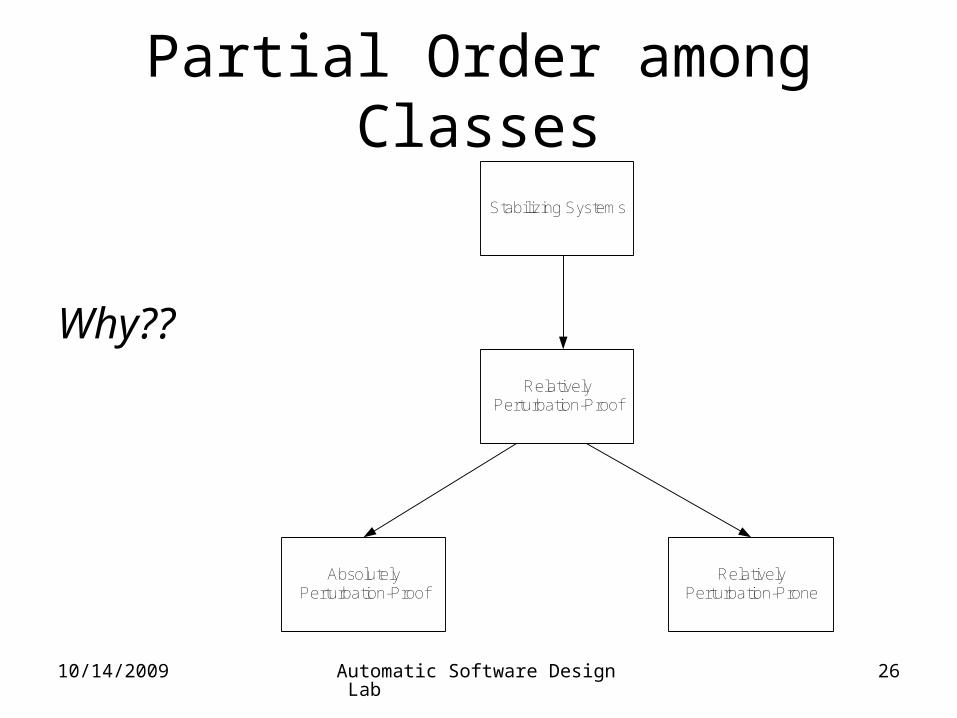
Partial Order among Classes
Why??
Stabilizing Systems
Relatively Perturbation-Proof
Absolutely Perturbation-Proof
Relatively Perturbation-Prone
10/14/2009 Automatic Software Design Lab 27
Further Investigations
• Given a set of gain functions, automatically transforming a perturbation-prone to a perturbation-proof system– Identify the perturbations leading to other equilibria
with higher gains
• Applicability of this concept to set of states rather than states (consider the notion of invariant)
• How to come up with gain-functions representing the system progress properties
10/14/2009 Automatic Software Design Lab 28
Further Readings
- John F Nash, “Equilibrium point in n-person games,” Proceedings of the National Academy of Sciences of the United States of America, 36(1):48-49, 1950.
- A. Arora & M. G. Gouda, “Closure and convergence: a foundation of fault-tolerant computing.” In Proceedings of the 22nd International Conference On Fault-Tolerant Computing Systems
10/14/2009 Automatic Software Design Lab 29
Thank you!
















![[ASM] Lab1](https://img.pdfslide.us/doc/110x75/588121881a28abb9388b706b/asm-lab1.jpg)