Embed Size (px)
Citation preview

1
Students:Students:Paolo BellandiPaolo Bellandi Emanuele Ferrari Emanuele Ferrari
Course: Optical Measurements 2007Course: Optical Measurements 2007
Development of a laser slit systemin LabView

2
• Design of a laser slit system, using active triangulation
• Implementation of the demonstrator– Laser line projector– CMOS camera– Triangulation geometry
• Implementation of the measurement procedures in LabView
• Metrological validation of the system
Objectives

3
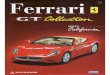
P e C : exit and input pupils for the projector and the camera respectively
The camera sensor is positioned at the image plane. The reference systems are (xc, yc, zc), and (u,v). The former is centered at point C; the latter is centered at point O’; it is the central point of the image plane.
H and V: sensor size along u and v coordinates; N and M: sensor resolution along u and v
f: focal length od the camera lens
(x,y,z) is the global reference system.
Two geometrical parameters. Baseline d and standoff distance L. Their relation is:
FW and FH represent the dimension of the Field of View (FOV). FW is the maximum length of the laser stripe.
System layout

4
Similar triangles:
FW
LHf
FW
L
H
f
To calculate the value of FH:
f
LVFH
Layout in the x,z plane

5
The height of object point Po is evaluated with respect to the reference plane. The deformation induced by the object shape is evaluated as the difference with respect to the undeformed line on the reference plane.
In the presence of the object, ray PO is deviated at Po and impinges at position A on the image plane. Point B is the corresponding point on the reference plane.
Since the triangles are similar:
d
ZL
BO
Z PoPo
Consequently:
BOd
BOLZPo
Triangulation

6
Laser line projector
Camera
d
L
f
The demonstrator

7
The geometry is:
d
L
f
Laser
CCD
H
FW
z
y
x
This means :
d
Lf
Laser
CCDH
FW
FW
Ld
H
f 22
hence:
FW
LdHf
22
Parameters evaluation 1

8
Input values
D = 16 cm
L = 9.5 cm
H = 768 pixels
Evaluation of parameter f
mmFW
LdHf 6,18
22
We have used an objective with f=12mm and a 5mm ring. The corresponding value for FW is 7 cm.
V = 576 pixels
Pixel Size = 8,48 um
FW = circa 6,5 cm
Parameters evaluation 2

9
Ray tracing in the presence of an object
Triangulation again

10
O’P is evaluated from the measure in pixels multiplied by the pixel size. Then:
Note that
And L
arctgd
ˆAOC
2 2OF d L 'O P OF
OAf
2 2AF OA OF
arcsinOF
AF
180 180 90 90
The vallues of angles and :
e
Triangulation equations

11
Applying the sine theorem to we haveAOB
sin( ) sin(180 ) sin( )
OA OB OB
BOZ
F DZ
sin( )
OFOA
AFOB
OZ L OZ
dOB
L OBOZ
OB d
Sine triangles are similar andWe get:
This is the measurement information we want
then
Triangulation equations

12
• The centre of gravity of the signal acquired along direction v, for each value of the coordinate u must be calculated.
• The algorithm is:
cc
cc
c l
clb
bc : position of the centre of gravity; lc : gray level of the c-element.
• The method must be iterated for all the columns in the image.
Detection of the light pattern

13
Filtering of the input image (preprocessing)
Image thresholding
Acquire image and calculate number of rows and number of columns.
Application of algorithm
Overlay of the centres on the image
This subVi outputs the vector of the centres of gravity and the
corresponding image
Labview subVi “Calcolo_Baricentri_Sub” (example)

14
Live acquisition
Visualization window
Threshold to trim the detection algoritm
Freeze image
Front panel

15
Freezed image
Gray level visulatization along a profile line
Front panel

16
New acquisition
Save image
Save the centres of gravity
Evaluation of the measurement information. Triangulation is
performed here.
Error message if the results are not saved
Front panel

17
Deformed profile
Reference measurement (caliper used): 4.73 mm
Value measured by the system: 4.72 mm
Reference profile:
Threshold equal to 229.
Results

18
Botton profiles Reference measure (mm)
System measure (mm)
threshold
3.13 3.23 229
4.29 4.40 9
5.76 5.77 39
3.26 3.23 39
3.91 4.08 21
Results

19
botton Profiles Reference measure (mm)
System measure (mm)
threshold
2.88 2.80 21
3.10 3.12 21
3.26 3.23 51
3.18 3.12 72
Results

20
botton Profiles Reference measure (mm)
System measure (mm)
threshold
5.11 4.61 112
5.15 3.98 47
4.46 4.61 216
12.89 12.99 213
Other results (influence of texture and of reflectivity

21
•For measurement ranges up to 10mm the measurement uncertainty is 0,1mm.
•The performances can be increased if absolute calibration is performed
•Camera model
•Intrinsic and extrinsic parameters must be estimated
•Projection model
•The projection plane must be estimated
•The front panel is user friendly
Conclusions