Embed Size (px)
Citation preview

1
Stability of an Uncontrolled Bicycle
Delft University of TechnologyLaboratory for Engineering Mechanics
Mechanical Engineering
Dynamics Seminar, University of Nottingham, School of 4M, Oct 24, 2003
Arend L. SchwabLaboratory for Engineering Mechanics
Delft University of TechnologyThe Netherlands

2
Acknowledgement
Cornell University
Andy Ruina
Jim Papadopoulos1
Andrew Dressel
Delft University
Jaap Meijaard2
1) PCMC , Green Bay, Wisconsin, USA2) School of 4M, University of Nottingham, England, UK

3
Motto
Everyone knows how a bicycle is constructed …
… yet nobody fully understands its operation.

4
Contents
- The Model
- FEM Modelling
- Equations of Motion
- Steady Motion and Stability
- A Comparison
- Myth and Folklore
- Conclusions

5
The Model
Modelling Assumptions:
- rigid bodies- fixed rigid rider- hands-free - symmetric about vertical plane - point contact, no side slip- flat level road- no friction or propulsion
assumptions

6
The Model
4 Bodies → 4*6 coordinates(rear wheel, rear frame (+rider), front frame, front wheel)
Constraints:3 Hinges → 3*5 on coordinates2 Contact Pnts → 2*1 on coordinates
→ 2*2 on velocities
counting
Leaves: 24-17 = 7 Independent Coordinates, and24-21 = 3 Independent Velocities (mobility)
The system has: 3 Degrees of Freedom, and4 (=7-3) Kinematic Coordinates

7
The SPACAR Model
SPACARSoftware for Kinematic and Dynamic Analysis of Flexible
Multibody Systems; a Finite Element Approach.
FEM-model : 2 Wheels, 2 Beams, 6 Hinges

8
4 Nodal Coordinates:
2D Truss Element
),,,( 2211 yxyxx
3 Degrees of Freedom as a Rigid Body leaves:
1 Generalized Strain:
)( 02
122
12 xDε lyyxxl
Rigid Body Motion this is the Constraint Equation
0ε
0lll
FEM modelling
(intermezzo)

9
Generalized Nodes:
Position Wheel Centre
Contact Point
Euler parameters
Rotation Matrix: R(q)
),,( zyx wwww
Wheel Element
),,,,( 3210 qqqqq
),,( zyx cccc
Rigid body pure rolling: 3 degrees of freedom
In total 10 generalized coordinates
Impose 7 Constraints
Nodes
(intermezzo)

10
)2/()( 02
01 rr rr
re w2
)(3 cg
ner )(4 wRadius vector:
Rotated wheel axle:
Normal on surface:
wcr
Surface:
ww eR(q)e
0)( xg
)(cn g
Holonomic Constraints as zero generalized strains
StrainsWheel Element
0xDε )(
Elongation:
Lateral Bending:
Contact point on the surface:
Wheel perpendicular to the surface
Normalization condition on Euler par: 12
05 qqq(intermezzo)
11
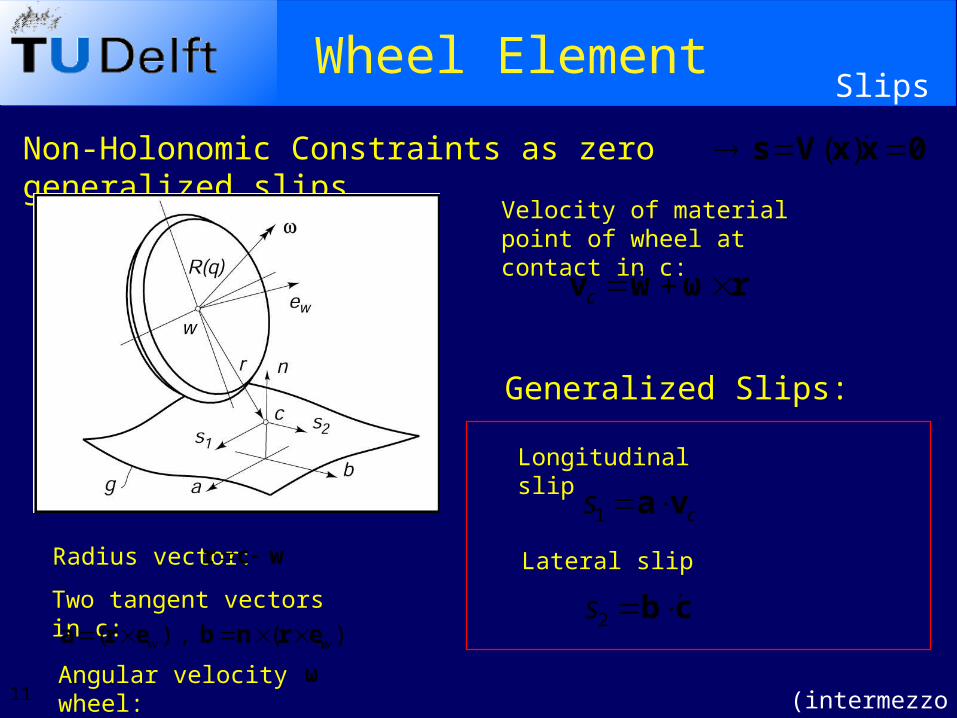
Non-Holonomic Constraints as zero generalized slips
Wheel Element
0xxVs )(
Slips
Generalized Slips:
cs va1
cb 2s
Velocity of material point of wheel at contact in c:
rωwv c
Longitudinal slip
Lateral slip
Two tangent vectors in c:
)( , )( ww ernbera
Radius vector: wcr
Angular velocity wheel: ω(intermezzo)

12
The Model
3 Degrees of Freedom:
4 Kinematic Coordinates:
r
d
rot. rear wheel
anglesteer
angle lean
q
r
r
pnt.contact rear
pnt.contact rear
framerear angleyaw
rot. lfront whee
y
x
f
k
q
Input File with model definition

13
Eqn’s of Motion
bqA
q
fM
q
q
q
d
d
k
d
d
t
1
d
dState equations:
with MTTM T and MhfTf T
For the degrees of freedom eqn’s of motion:
and for kinematic coordinates nonholonomic constraints:
dq
kq
MhfTqMTT TdT
bqAq dk

14
Steady Motion
constant
constant
0
d
d
k
d
d
tq
q
qSteady motion:
Stability of steady motion by linearized eqn’s of motion,
and linearized nonholonomic constraints
0qKqKqCqM kkdddd
kkdddk qBqBqAq

15
Linearized State
0
0
0
q
q
q
BBA
00I
KKC
q
q
q
I00
0I0
00M
k
d
d
kd
kd
k
d
d
bqA
q
fM
q
q
q
d
d
k
d
d
t
1
d
d
Linearized State equations:
State equations:
with dTT
qMhTCTTC ,
qqqq CvMhTfxMTKFTKKK ,,,, TTTkd and
and qbBBB , kd

16
Straight Ahead Motion
0
0
0
q
q
q
BBA
00I
KKC
q
q
q
I00
0I0
00M
k
d
d
kd
kd
k
d
d
Turns out that the Linearized State eqn’s:
Upright, straight ahead motion :
constant/ speed rot. rear wheel
0 anglesteer
0 angle lean
rvr
0

17
Straight Ahead Motion
0
0
0
q
q
q
BBA
00I
KKC
q
q
q
I00
0I0
00M
k
d
d
kd
kd
k
d
d
in the Linearized State eqn’s:
Moreover, the lean angle and the steer angle are decoupled from the rear wheel rotation r (forward speed).
0
000
0xx
0xx
,
000
0xx
0xx
,
x00
0xx
0xxdKCM

18
Stability of the Motion
with and the forward speed
Linearized eqn’s of motion:
7.20
960 ,
8.827
271003 ,
8.16.0
400 ,
3.03
3130201 KKCM
0)()( 2201 ddd vv qKKqCqM
steer
leandq rv r
For a standard bicycle (Schwinn Crown) we have:

19
Root LociRoot Loci from the Linearized Equations of Motion,
Parameter: forward speed rv r
Stable speed range 4.1 < v < 5.7 m/s
v
vv

20
Check StabilityFull Non-Linear Forward Dynamic Analysis
with the same SPACAR model at different speeds.
ForwardSpeedv [m/s]:
01.75
3.53.68
4.9
6.3
Stable speed range 4.1 < v < 5.7 m/s
4.5

21
Compare
A Brief History of Bicycle Dynamics Equations
- 1899 Whipple- 1901 Carvallo- 1903 Sommerfeld & Klein- 1948 Timoshenko, Den Hartog- 1955 Döhring- 1967 Neimark & Fufaev- 1971 Robin Sharp- 1972 Weir- 1975 Kane- 1987 Papadopoulos
- and many more …

22
Compare
Papadopoulos & Hand (1988)
0)()( 2201 ddd vv qKKqCqM
Papadopoulos & Schwab (2003): JBike6
MATLAB m-file for M, C1 K0 and K2

23
Compare
Papadopoulos (1987) with SPACAR (2003)
0)()( 2201 ddd vv qKKqCqM
Perfect Match, Relative Differences < 1e-12 !

24
JBike6 MATLAB GUI

25
Myth & Folklore
A Bicycle is self-stable because:
of the gyroscopic effect of the wheels !?
of the effect of the positive trail !?
Not necessarily !

26
Funny Bike
ForwardSpeedv [m/s]:
3

27
Conclusions
•The Linearized Equations of Motion are Correct.
•A Bicycle can be Self-Stable even without Rotating Wheels and with Zero Trail.
Further Investigation:
•Add a human controler to the model.
•Investigate stability of steady cornering.