Embed Size (px)
Citation preview
1
School of Electrical EngineeringTel Aviv University
Single Antenna Geo-location Based on Signal Structure
Elad Tzoreff, Ben-Zion Bobrovsky, Anthony J. Weiss
(Free space Radio Signals)(Free space Radio Signals)

2
School of Electrical EngineeringTel Aviv University
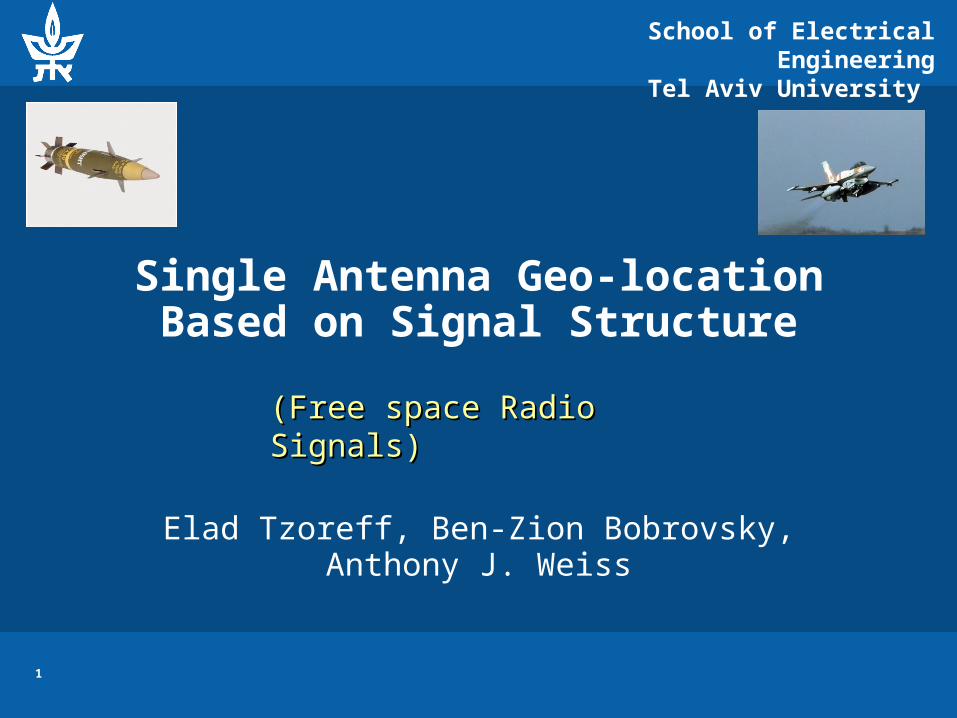
Background: Common Geo-location methods
Direction of Arrival (DOA)
Time Difference of Arrival (TDOA)
Differential Doppler (DDOP)
Received Signal Strength (RSS)
Finger Printing
Combinations of the above
3
School of Electrical EngineeringTel Aviv University
DOADOA
RSSRSS
DDOPDDOP
TDOATDOA
4
School of Electrical EngineeringTel Aviv University
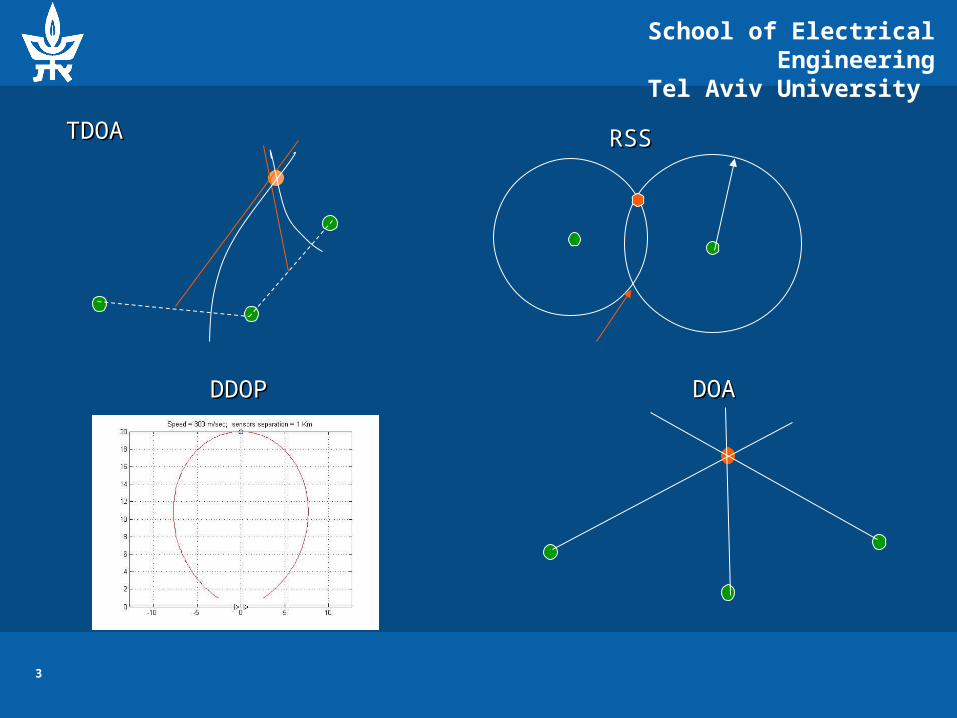
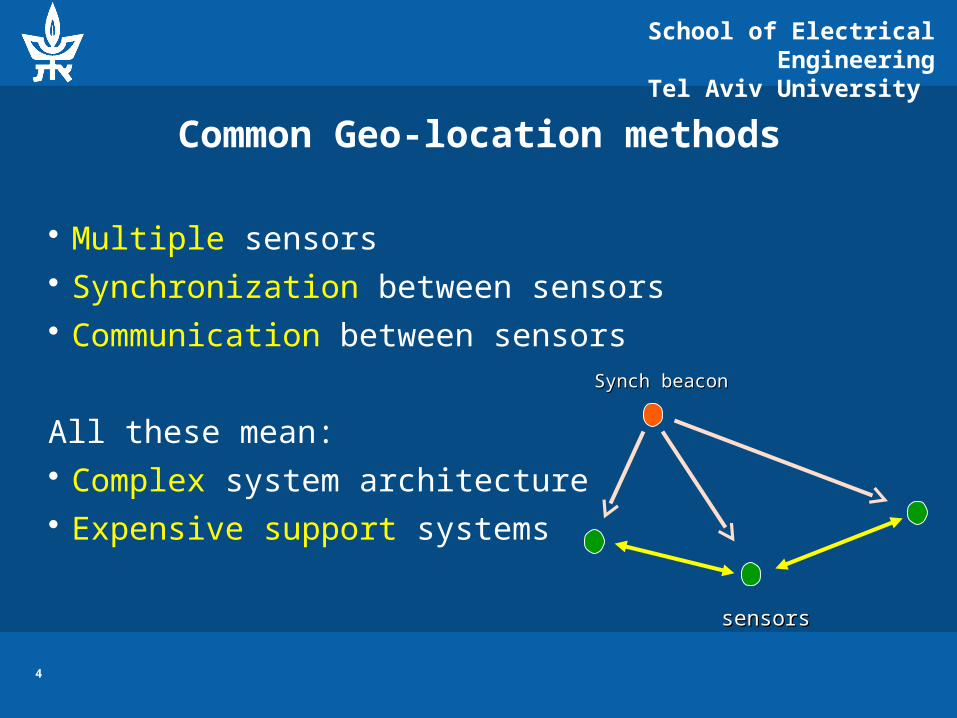
Common Geo-location methods
Multiple sensors Synchronization between sensors Communication between sensors
All these mean: Complex system architecture Expensive support systems
Synch beaconSynch beacon
sensorssensors
5
School of Electrical EngineeringTel Aviv University
We are interested in simplifying geo-location system, but how?

6
School of Electrical EngineeringTel Aviv University
Observation
Most radars are periodic or at least predictable:

7
School of Electrical EngineeringTel Aviv University
Digital Communication Signals
Communication Carrier is periodic
Communication symbols appear periodically
Communication synch frame appear periodically
Spreading code is periodic
8
School of Electrical EngineeringTel Aviv University
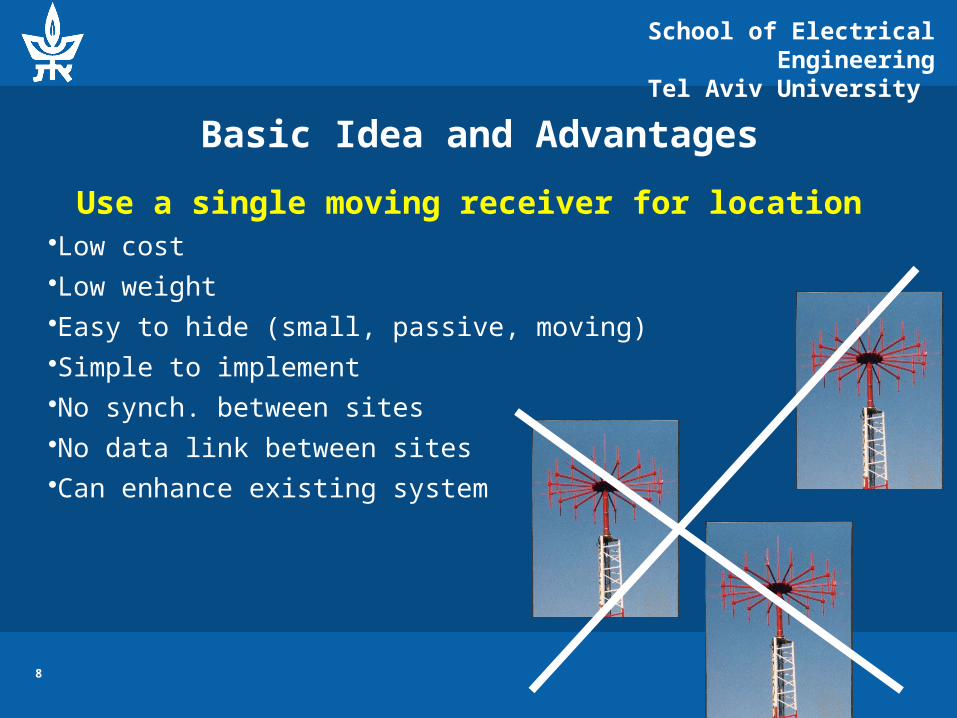
Basic Idea and Advantages
Use a single moving receiver for location Low costLow weightEasy to hide (small, passive, moving)Simple to implementNo synch. between sitesNo data link between sitesCan enhance existing system
9
School of Electrical EngineeringTel Aviv University
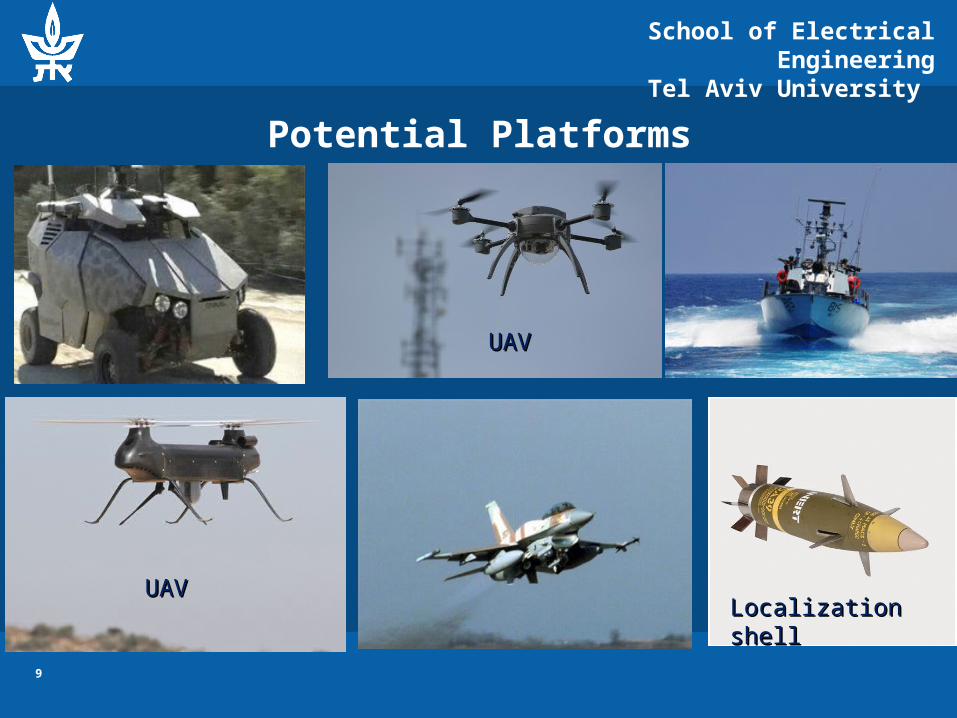
Potential Platforms
UAVUAV
UAVUAV
Localization shellLocalization shell

10
School of Electrical EngineeringTel Aviv University
Localization Based on Signal Structure
A B
Time
Time
DTOA
Receiver path
Transmitter
The periodicity as observed at A
The periodicity as observed at B
Observed at A
Observed at B
Ext rapolation
Receiver moving from A to B
{ {{

11
School of Electrical EngineeringTel Aviv University
TDOA Lines of Position

12
School of Electrical EngineeringTel Aviv University
The LOPs Associated with DTOA
13
School of Electrical EngineeringTel Aviv University
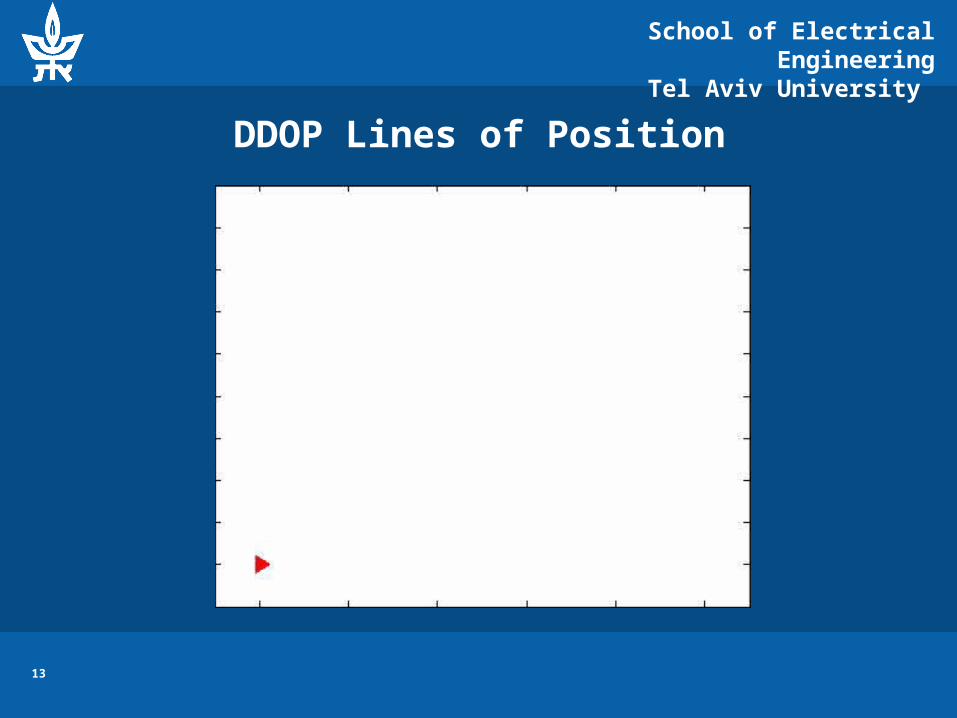
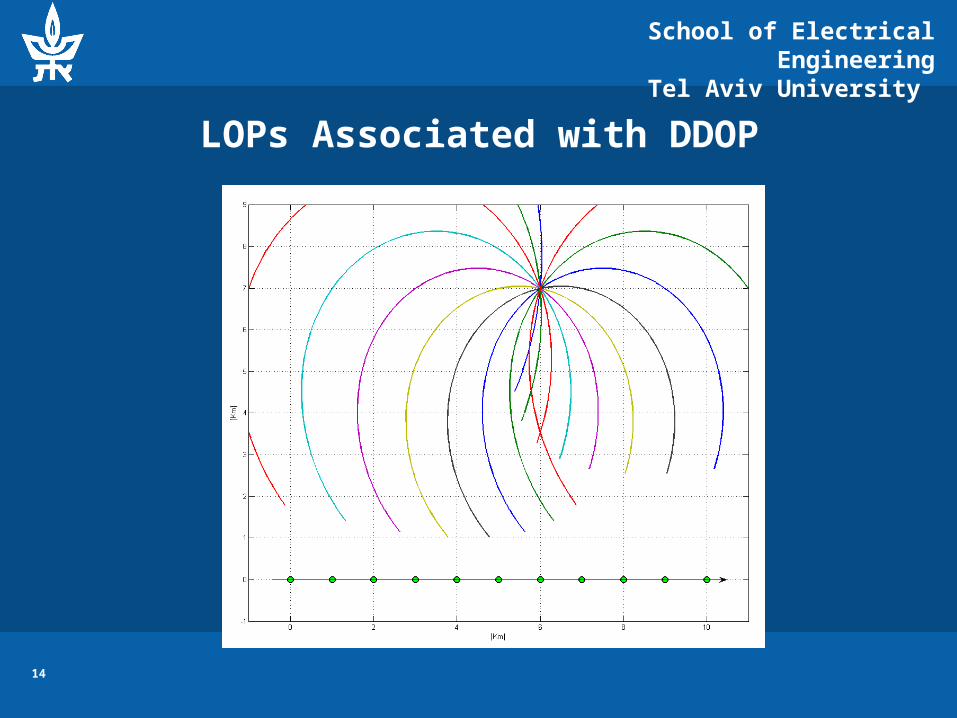
DDOP Lines of Position
14
School of Electrical EngineeringTel Aviv University
LOPs Associated with DDOP

15
School of Electrical EngineeringTel Aviv University
Potential Obstacles
Transmitter Oscillator instability
Receiver clock instability
Receiver Position inaccuracy
TDOA/DDOP measurements errors (Noise, BW,
Multipath)
Transmitted signal is too short
16
School of Electrical EngineeringTel Aviv University
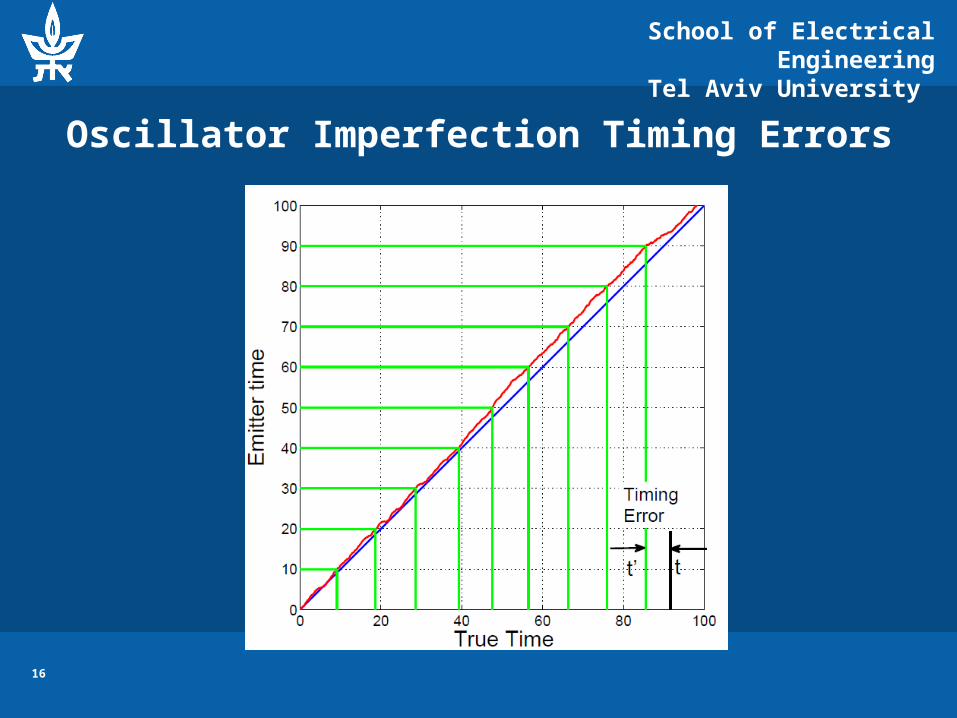
Oscillator Imperfection Timing Errors

17
School of Electrical EngineeringTel Aviv University
Oscillator InstabilityTiming errorTiming error
error due to frequency skew
( ) random errort
hh = Random error intensity = Random error intensity
• Voltage controlledVoltage controlled
• Temp. compensatedTemp. compensated
• Oven compensatedOven compensated
1min, ( ) 8 [ ]
10min, ( ) 25 [ ]
t t ns
t t ns
18
School of Electrical EngineeringTel Aviv University
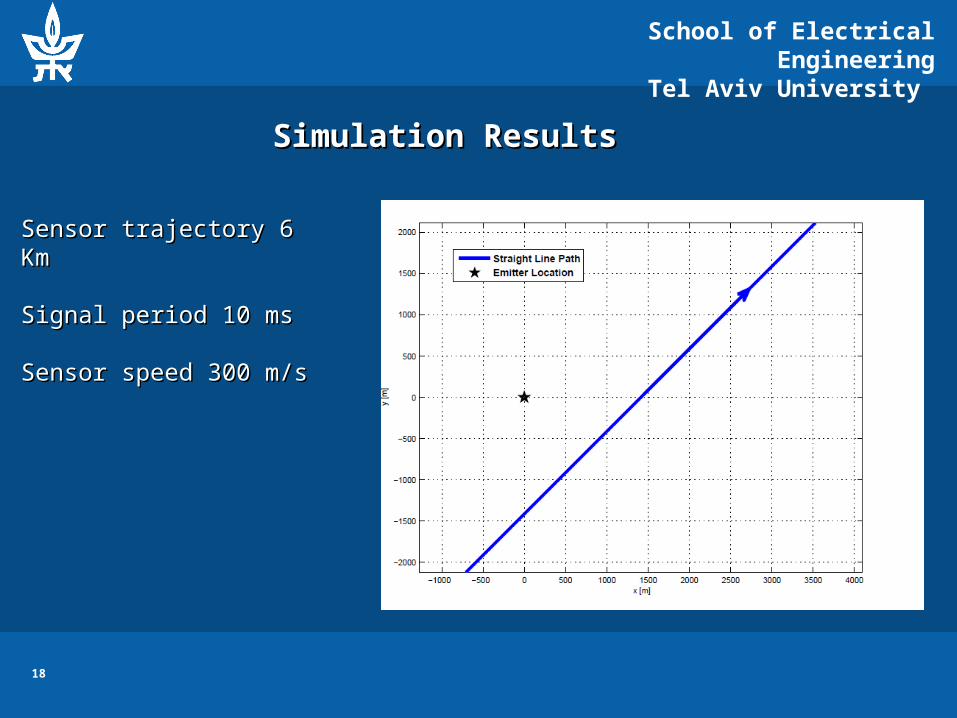
Sensor trajectory 6 KmSensor trajectory 6 Km
Signal period 10 msSignal period 10 ms
Sensor speed 300 m/sSensor speed 300 m/s
Simulation ResultsSimulation Results
19
School of Electrical EngineeringTel Aviv University
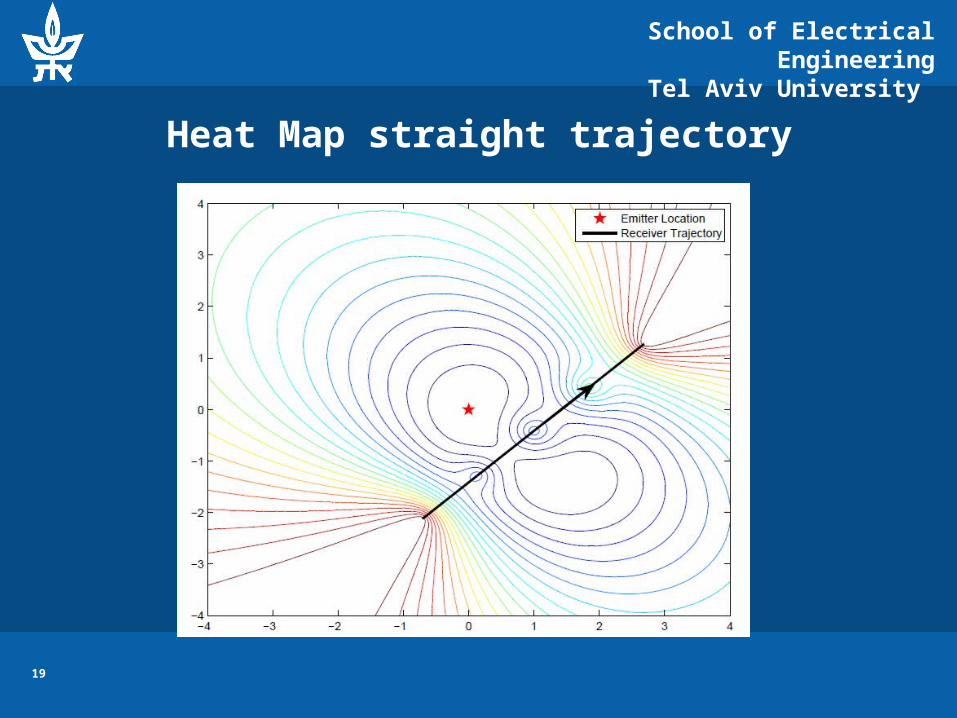
Heat Map straight trajectory
20
School of Electrical EngineeringTel Aviv University
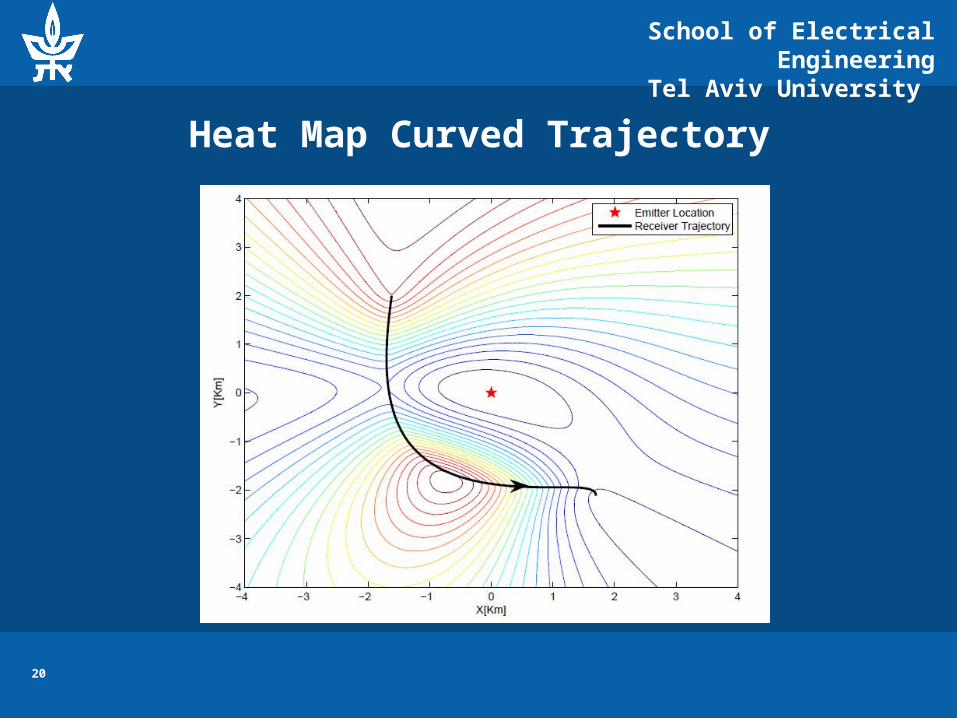
Heat Map Curved Trajectory

21
School of Electrical EngineeringTel Aviv University
At High SNR Accuracy is Limited by Oscillator Instability

22
School of Electrical EngineeringTel Aviv University
The Slower the Receiver Moved the Larger the error

23
School of Electrical EngineeringTel Aviv University
For Good Oscillators the Accuracy is Determined by SNR

24
School of Electrical EngineeringTel Aviv University
Thank you, Questions, Comments or Thank you, Questions, Comments or remarks?remarks?