Embed Size (px)
Citation preview

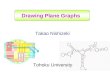
1 Plane and Planar Graphs
Definition 1
A graph G(V,E) is called plane if
• V is a set of points in the plane;
• E is a set of curves in the plane such that
1. every curve contains at most two vertices and these vertices
are the ends of the curve;
2. the intersection of every two curves is either empty, or one,
or two vertices of the graph.
Definition 2
A graph is called planar, if it is isomorphic to a plane graph. The
plane graph which is isomorphic to a given planar graph G is said
to be embedded in the plane. A plane graph isomorphic to G is
called its drawing.
1
2
3
4
56
7
8
92
56
7
8
9
3
4
1
G is a planar graph H is a plane graph isomorphic to G
1

The adjacency list of graph F . Is it planar?
1 4 5 6 8 9 11
2 9 7 6 10 3
3 7 11 8 2
4 1 5 9 12
5 1 12 4
6 1 2 8 10 12
7 2 3 9 11
8 1 11 3 6 10
9 7 4 12 1 2
10 2 6 8
11 1 3 8 7
12 9 5 4 6
What happens if we add edge (1,12)? Or edge (7,4)?
2

Definition 3
A set U in a plane is called open, if for every x ∈ U , all points
within some distance r from x belong to U .
A region is an open set U which contains polygonal u, v-curve for
every two points u, v ∈ U .
area without the boundary
Definition 4
Given a plane graph G(V,E), a face of G is a maximal region of
the plane if the vertices and the edges of G are removed.
An unbounded (infinite) face of G is called exterior, or outer face.
The vertices and the edges of G that are incident with a face F form
the boundary of F .
3

Proposition 1
For every face of a given plane graph G, there is a drawing of G
for which the face is exterior.
2
36
1
2
1
3
6
������
������
5
7
8
9
4
9
4
5
7
8
4

Dual Plane Graphs
Definition 5
Let G be a plane graph. The dual graph G∗ of G is a new
plane graph having a vertex for each face in G and the edges
that correspond to the edges of G in the following manner:
if e is an edge of G which separates two faces X and Y ,
then the corresponding dual edge e∗ ∈ E(G∗) is an edge
joining the vertices x and y that correspond to X and Y
respectively.
Remark. Different plane drawings (embeddings) of the same
planar graph may have non-isomorphic duals.
Construct duals to these drawings.
5

Definition 6
The length of a face F in a plane graph G is the total number
of edges in the closed walks in G that bound the face.
Proposition 2
If l(Fi) denotes the length (the number of edges in its boundary),
of face Fi in a plane graph G, then
2e(G) =∑
l(Fi).
Definition 7
A bond of a graph G is a minimal non-empty edge cut.
Proposition 3
Edges of a plane graph G form a cycle iff the corresponding edges
in G∗ form a bond.
6

Theorem 1 (Euler):
If G is a connected plane (p, q)-graph with r faces, then
p− q + r = 2.
Proof. We prove it by induction on q.
Base. If q = 0, then p = 1; obviously, r = 1, and the result
follows.
Inductive Step. Assume that the Euler Theorem holds true for
all connected graphs with fewer than q (q ≥ 1) edges, and let G
be a connected plane graph with q edges.
If G is a tree, then p = q+1 and r = 1 (the only face is exterior)
implying the result.
If G is not a tree, then it has an enclosed face. The edges of the
face form a cycle. Take any edge e on the cycle and consider
graph
H = G− e.
Since q(H) = q − 1, by induction, p(H)− q(H) + r(H) = 2. But
p(H) = p and r(H) = r − 1. The result follows.
7

Theorem 2
If G is a planar graph (no parallel edges) with p vertices and q
edges, (q ≥ 3), then q ≤ 3p − 6. If, in addition, G is bipartite,
then q ≤ 2p− 4.
Proof. Let r be the number of faces of G and let mi be the
number of edges in the boundary of the ith face (i = 1, ..., r).
Since every face contains at least three edges,
3r ≤r∑
i=1
mi.
On the other hand, since every edge can be in the boundary of
at most two faces,r∑
i=1
mi ≤ 2q.
Thus, 3r ≤ 2q and by Euler’s Theorem, p−q+2q/3 ≥ 2, implying
q ≤ 3p− 6.
If G is bipartite, the shortest cycle is of length at least 4. Thus,
4r ≤r∑
i=1
mi.
Together with∑ri=1mi ≤ 2q and p− q + r = 2, we get the second
part of the Theorem.
8

Corollary 1 Every planar graph G contains a vertex of degree
at most 5.
Proof. (HINT: assuming that all degrees are ≥ 6, estimate the
number of edges in the graph, and compare your estimate with
that by Theorem 2 .)
Corollary 2 Graphs K3,3 and K5 are not planar.
Proof. For K5, p = 5 and q = 10. Thus, q > 3p− 6 = 9 and by
Theorem 2, K5 is not planar.
If K3,3 were planar, then the second part of Theorem 2 would
apply, leading to a contradiction, since for this graph p = 6,
q = 9, and q > 2p− 4.
Definition 8 A subdivision of an edge ab in a graph G is an
operation which replaces ab with two edges az and zb where z is
a new vertex different from other vertices of G. The result of
the subdivision is also called a subdivision of G.
A Kuratowski graph is a graph obtained by several subdivisions
from either K5 or K3,3.
Corollary 3 No Kuratowski graph is planar.
9

2 Coloring Planar Graphs
Theorem 3 Every planar graph G is 5-colorable.
Proof. By induction on the number n(G) of vertices.
Base. For all planar graphs with n(G) ≤ 5, the statement is
correct.
Inductive step. Let G have more than 5 vertices. Select a
vertex v of degree ≤ 5. It always exists, since else, the number
of edges in the graph would exceed the upper bound of 3p− 6. By
induction, graph G− v is 5-colorable.
Consider a 5-coloring of G − v. If any color, 1 2, 3, 4, 5 is
10

not used for vertices adjacent to v, use it for v. Thus, we need
to assume that v has 5 neighbors that are colored using all 5
colors. Let us call those neighbors according to their colors:
v1, v2, v3, v4, v5 (see Figure below).
Consider a bipartite graph H induced by all vertices of G − v
whose colors are 1 or 3, and let C be the connected component
of H which contains vertex v1. If C does not contain vertex v3,
then we re-color C: every vertex of C whose color is 1 (resp.
3) gets color 3 (resp. 1). This recoloring frees color 1 for v,
yielding a 5-coloring of G.
1
1
3
3
2
2
4
4
1
2
34
5 v
v
v
v
v
v
1
3
Finally, assume that C contains vertex v3. Thus, there is a 2-
colored path connecting vertices 1 and 3. This path together with
vertex v forms a cycle which makes it impossible the existence
of a path colored 2 and 4 connecting vertices v2 and v4. Thus,
recoloring the 2-colored connected component containing vertex
v2 makes color 2 available for coloring v.
11

From colorings faces of a map to coloring its edges.
The coloring of the faces of an arbitrary map is reduced to that
of a map for which every vertex has three incident edges. See
the Figure below.
An edge coloring of a graph G is an assignment of colors to edges
such that any two edges incident to the same vertex have differ-
ent colors.
12

Theorem. (Tait, 1878). A 3-regular plane graph without bridges
is 4-face colorable iff it is 3-edge-colorable.
Proof. Suppose G satisfies the conditions of the theorem and
it is 4-face-colorable. Let the colors be c0 = 00, c1 = 01, c2 =
10, c3 = 11.
Because G is bridge-less, every edge bounds two distinct faces.
Given an edge between faces colored ci and cj, assign this edge
the color obtained by adding ci and cj coordinate-wise modulo 2.
For example: c0 + c1 = c1; c1 + c3 = c2; c2 + c3 = c1.
11
1001
11
0110
1001
00 01 10
11
The reverse. Suppose now that G has a proper 3-edge-coloring,
and let the colors be 1, 2, and 3. Since G is 3-regular, every
color appears at every vertex. Let E1, E2, and E3 be the edge-
sets colored 1, 2, and 3, respectively. The union of any two of
them is the union of disjoint cycles. Let H1 = E1 ∪ E2 and
H2 = E1 ∪ E3.
The faces of graph H1 can be 2-colored with two colors α and β.
The faces of graph H2 can be 2-colored with two colors γ and δ.
Then each face of G is a subset of a face in H1 and a subset of a
face in H2. Assign to each face in G a pair of colors (x, y) where
13

x ∈ {α, β} and y ∈ {γ, δ}.
It is easy to prove that any two adjacent faces of G get pairs
off colors that are differ in at least one coordinate. Thus the
assignment is a 4-coloring of the faces of G.
1
3 2
123
3
2 1
2
1
2
2
13
3
3
1
1
2
12
2 1
2
1
2
2
11
1
3
13
3
1
1
13
3
3
1
Tutte’s conjecture: every bridge-less 3-regular graph G which
is not three-edge colorable has the Petersen graph as its minor,
that is the Petersen graph can be obtained from G by contracting
and removing edges.
14

3 Kuratowski theorem
Definition 9 A subgraph H of a graph G which is a subdivision
of K5 or K3,3 is called a Kuratowski graph.
Theorem 4 Every non-planar graph contains a Kuratowski sub-
graph.
The Idea of a Proof.
If the theorem is incorrect, let us take a smallest graph for which
it fails. Thus, G is the smallest non-planar graph without Kura-
towski subgraphs.
If e = xy is an edge in G, then we form a new graph H by
“contracting” e into a vertex z, which is adjacent to all vertices
that were adjacent to at least of one of x and y. It turns out that
such an operation does not create Kuratowski subgraphs (must
be proved), thus by minimality of G, graph H is planar.
Let us assume (must be checked if this can always be done)
that an embedding of H − z contains a face bounded by a cy-
cle C, which contains all vertices adjacent to z. Then, the graph
G has an “almost” plane embedding, where the only non-plane
section is the edge e = xy all of whose neighbors lie on cycle
C = x1x2 . . . xt. Obviously, the way x and y are adjacent to the
vertices of C creates the non-planarity of G. Analyzing the pat-
tern of these adjacencies, we may find Kuratowski subgraphs in
G.
15

4 Proof of Kuratowski’s theorem
Definition 10 A minimal non-planar graph is a non-planar
graph F such that every proper subgraph of F is planar.
Lemma 1 For every face of a given plane graph G, there is a
drawing of G for which the face is exterior.
Lemma 2 Every minimal non-planar graph is 2-connected.
Proof. If G is disconnected, then by minimality, each compo-
nent of G is planar, and the whole graph is planar, since we can
embed every next component inside a face of the embedding of the
previous component (under some ordering of the components).
Let G have a cut-vertex x and let G1, G2, . . . , Gt be the connected
components of G−x. Let Hi be the subgraph induced on V (Gi)∪
{x}. By minimality of G, each Hi is planar. Let us embed each
Hi so that vertex x is in the outer face and then squeeze Hi
into an angle < 2π/t at vertex x. Combining those embeddings
together yields an embedding of G.
H
G1
x
G2
G3
x1H
x
2Hx
3
16

Definition 11 Let S be a separating set of a graph G and G1, . . . , Gt
be the connected components of G−S. The lobes of S in G are
subgraphs H1, . . . , Ht that are induced on V (G1) ∪ S, V (G2) ∪
S, . . . , V (Gt) ∪ S, respectively.
Lemma 3 Let S = {x, y} be a separating set of G. If G is non-
planar, then at least for one lobe Hi[S], adding edge xy creates
a non-planar graph.
Proof. Suppose for every lobe Hi, graph H+i = Hi∪xy is planar
(i = 1, . . . , t). Then, there is an embedding of H+i for which
xy is in the outer face. Then we create an embedding of G by
attaching each next H+i+1 to an embedding of ∪i
j=1H+j , where H
+i+1
is embedded into the face that contains xy.
yx
17

Lemma 4 Let G be a graph satisfying the following three con-
ditions: 1) G doesn’t contain a Kuratowski subgraph; 2) G is
non-planar; and 3) among the graphs satisfying (1) and (2), G
has the smallest number of edges.
Then G is 3-connected.
Proof. The condition (3) implies that the removal of any edge
violates either (1) or (2). Since it cannot create a Kuratowski
subgraph, the removal of any edge creates a planar subgraph of
G. Thus, G is a minimal non-planar graph.
By Lemma 2, G is at least 2-connected. Suppose G is not 3-
connected, and let S = {x, y} be a separating set. Then by
Lemma 3, adding edge xy to some S-lobe yields a non-planar
graph. Let H be that lobe and H+ = H ∪ {xy}. Since H+ is
non-planar and has fewer edges than G does, H+ must contain
a Kuratowski subgraph, say K ⊆ H+. Let H ′ be an S-lobe dif-
ferent from H.
PK
x
y
H +
PKx
y
CxH +
y
K Cx
y
Find a path P connecting x and y in H ′. Now, we replace edge
xy in K with P . Clearly, K − xy ∪ P is a Kuratowski subgraph
of G. The contradiction at least for one lobe Hi[S], adding edge
18

xy creates a non-planar graph. implies that G has no 2-cut, i.e.
G is 3-connected.
Definition 12 The operation of contraction of an edge e =
(x, y) of a graph G removes e, x and y from the graph, and adds
a new vertex z, which is adjacent to any old vertex u iff u was
adjacent to at least one of x or y. The resulting graph is denoted
G/(x, y).
Lemma 5 Every 3-connected graph G with at least five vertices
has an edge e such that G/e is 3-connected.
Proof. Take any edge e = xy and assume G/e is not 3-connected.
Then G/e has a separating set S of size 2. Since G is 3-connected,
S contains the vertex replacing x and y. Let z be the other ver-
tex. Then, {x, y, z} is a 3-separating set of G.
u
x
z
yDC
If G has no edge whose contraction yields a 3-connected graph,
every edge xy has a vertex z, call it a partner, such that the
removal of x, y and z disconnects the graph.
Among all edges of G, we take edge xy and a partner z whose
removal from G creates the largest connected component C. Let
D be the other component of G− {x, y, z}.
19

Since {x, y, z} is a minimal separating set of G, each of the
vertices x, y, z has neighbors in C and in D. Let u ∈ D be a
neighbor of z. and let v be the partner of edge zu.
By definition, G−{x, y, z} is disconnected. If v is outside of set
V (C) ∪ {x, y}, then the removal of {z, u, v} creates a connected
component which is larger than C, contradicting the choice of
C. On the other hand, if v ∈ V (C)∪{x, y}, then the removal of
z, v disconnects G, contradicting the fact that G is 3-connected.
This completes the proof.
u
v x
z
y
x
z
y
u
v
DCC D
20

Lemma 6 If G/e has a Kuratowski subgraph, then G has Ku-
ratowski subgraph.
Proof. Let H be a Kuratowski subgraph of G/e, where e = xy
and let z be the vertex of obtained from contracting xy.
If z 6∈ V (H), H is a Kuratowski subgraph of G.
If z ∈ V (H) is one of the vertices used to subdivide an edge in
K5, or K3,3 to obtain H, then replacing z with x, or y, or xy
yields a Kuratowski subgraph of G.
If z ∈ V (H) and among the edges incident to z at most one is
incident to x (resp. y) (this must happen if H is a subdivision of
K3,3), then replacing z with y (resp. with x) reveals a Kuratowski
subgraph in G.
Finally, let H be a subdivision of K5, and z be adjacent to four
edges, two of which are adjacent to x and the remaining two are
adjacent to y. Let u1 and u2 (resp. v1 and v2) be the two vertices
of degree 4 in H that are connected with z through the two edges
incident to x (resp. y). In this case, we find a subgraph of
G which is a subdivided K3,3: vertices u1, u2, and y form one
partition of the subgraph, and v1, v2, and x form the other; the
paths connecting them are those from H.
2
z
u
u
v
v
1
2
2
1u
u
1
2
x y
v1
v
21

Theorem 5 Every graph without Kuratowski subgraph is pla-
nar.
Proof. Because of lemma 3, we can consider 3-connected graphs
only. We prove the Theorem by induction on n the number of
vertices of G.
Base. If n ≤ 4, the the only 3-connected graph is K4, which is
planar.
Inductive Step. Let n ≥ 5 and e = xy be an edge such that
H = G/e is 3-connected.
5Kplanar cases K
3,3
22



























![t Z Ç } ( } i Z ] v Á } ] u v ] } v o Mmath4mrb.weebly.com/uploads/5/1/8/5/5185121/geo_16.09.08.pdf · a. Sketch a plane and a line that is in the plane. b. Sketch a plane and a](https://img.pdfslide.us/doc/110x75/5ec4617e17d06d7cdf35bab7/t-z-i-z-v-u-v-v-o-a-sketch-a-plane-and-a-line-that-is-in.jpg)