Embed Size (px)
Citation preview
1
OPERATING MODE AND METHOD ON INFORMATION COLLECTION
SYSTEMS OF GPS CLOSE-RANGE PHOTOGRAMMETRY
Speaker: WANG Da
Adviser: BEI Jin-zhong
2
Contents
1. Introduction
2. System Components
3. Basic Principles4. Analysis Of Test Results5. Conclusions
3
1 Introduction
• Information collection systems of GPS close-range photogrammetry is a kind of contactless measuring method which can be used in a region that the region is small in size but steep in terrain, heavy workload, difficult work and high-risk.

4
2 System Components
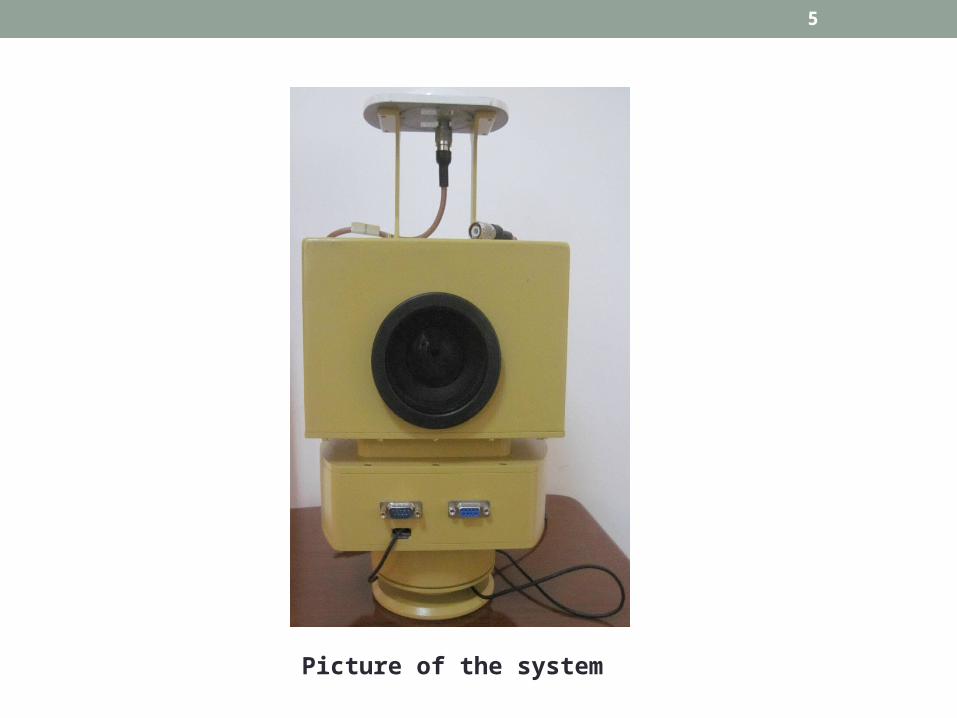
• Information collection systems of GPS close-range photogrammetry encapsulated GPS-OEM board, digital camera, 3D digital compass, control panels and USB Hub inside an equipment cabinet.
5
Picture of the system

6
3 Basic Principles
• Information collection systems of GPS close-range photogrammetry adopts the way of convergent photography which mean taking photo of the same target area in two different photo sites and record the GPS data and compass data continuously at the same time with only one camera.
7
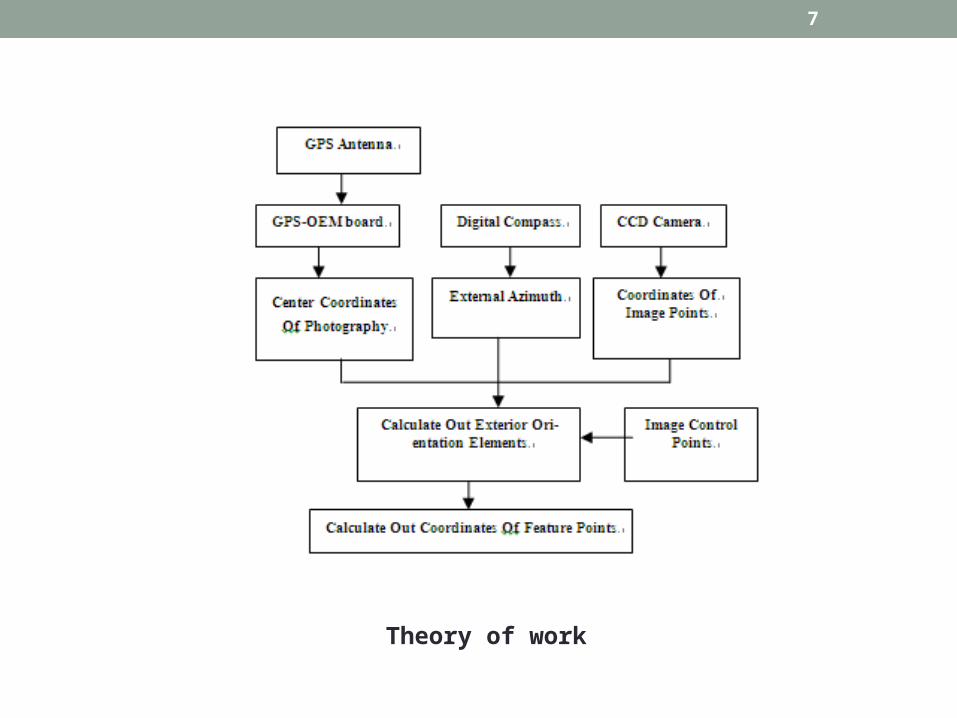
Theory of work
8
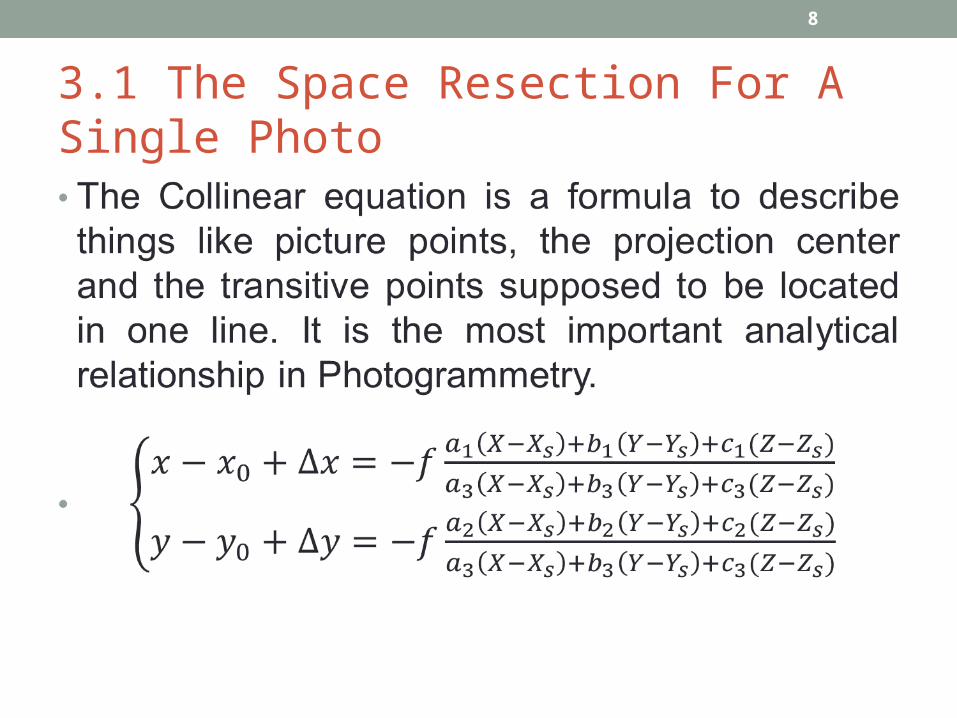
3.1 The Space Resection For A Single Photo

9
10
11
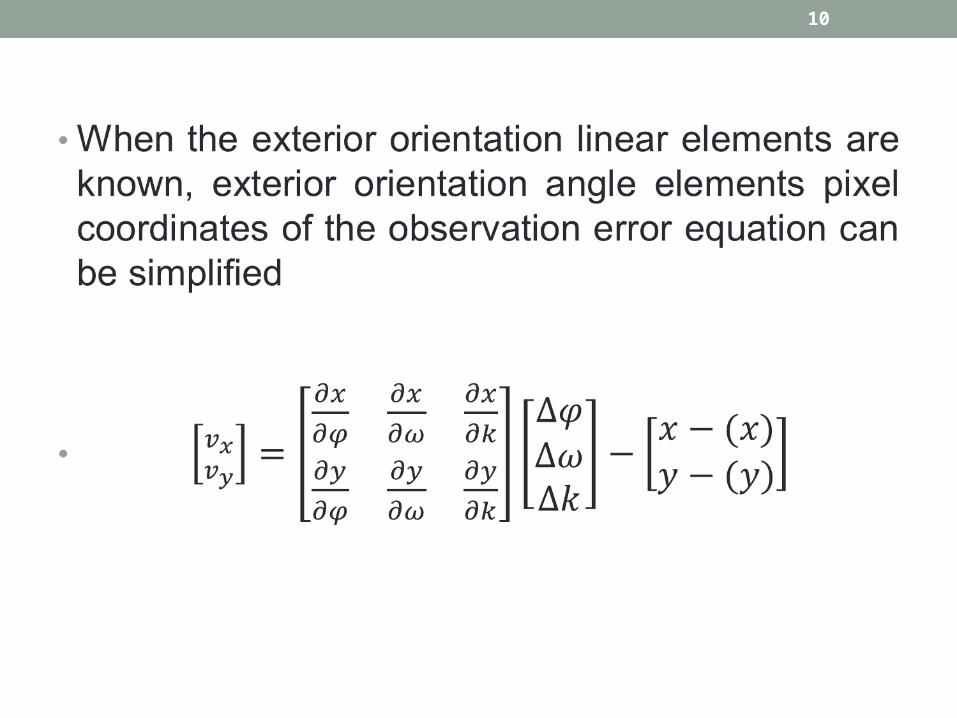
• According to one point and the corresponding feature points, a set of equations can be listed. And then settle three unknowns among them two control points at least. Based on the principle of least squares, iterative calculations, the exterior orientation angle elements can be worked out.

12
3.2 SPACE INTERSECTION WITH WITH-IMAGE• According to the space resection to calculate exterior orientation elements of the image, combined with the same name of the image point, taking advantage of space intersection, the geographic coordinates of the surface features characteristic points which have not been determined can be calculated.
• The error equation of Pixel coordinates observations are in the formula.

13

14
4 Analysis Of Test Results
Test field and Selected feature points
15
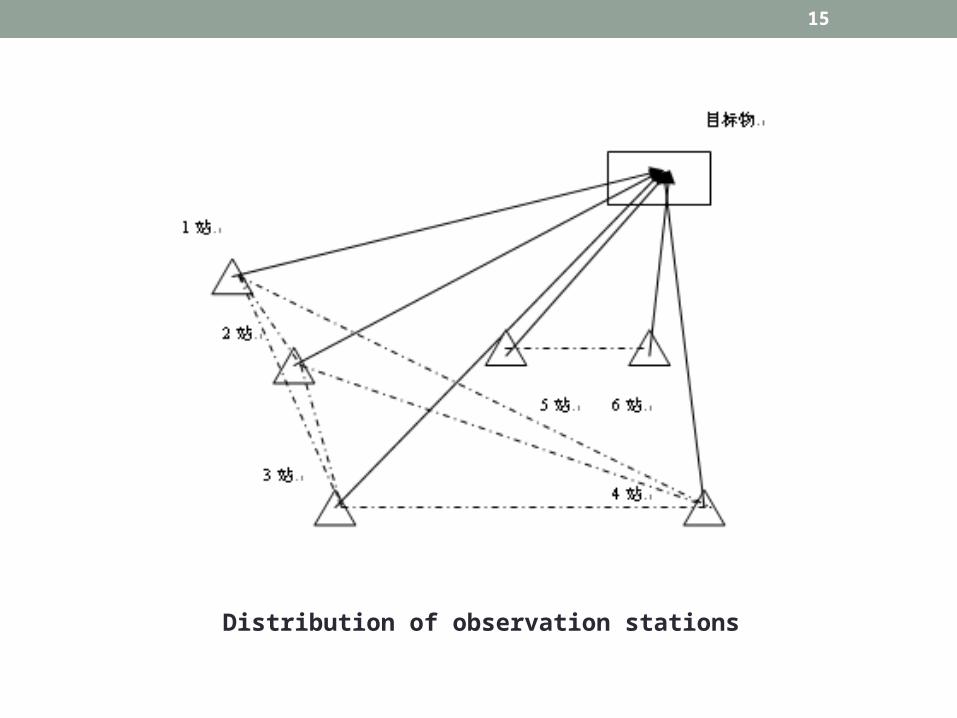
Distribution of observation stations

16
Point 5-6 2-3 3-4 2-4 1-2 1-3 1-4
1
B(m) 0.7230 0.8353 0.0143 0.1091 1.0011 0.1018 0.0409
L(m) 2.7330 2.8996 0.0522 1.4895 0.7244 0.2458 0.2095
H(m) 0.5773 0.4083 0.0065 0.1437 0.3014 0.0116 0.0081
3
B(m) 0.0670 0.3786 0.0298 0.1010 0.1823 0.0341 0.0329
L(m) 0.6248 1.4860 0.0459 0.3666 0.1008 0.0316 0.0300
H(m) 0.1926 0.3237 0.0865 0.3725 0.2437 0.0431 0.0405
8
B(m) 0.2976 0.2273 0.0301 0.0612 0.1614 0.0224 0.0303
L(m) 0.7240 0.5643 0.0051 0.2893 0.0868 0.0225 0.0194
H(m) 0.0955 0.0412 0.0385 0.0363 0.0120 0.0257 0.0227
11
B(m) 0.1430 0.1798 0.0173 0.0312 0.1374 0.0031 0.0134
L(m) 0.5266 0.5743 0.0408 0.2778 0.0528 0.0032 0.0075
H(m) 0.0305 0.1182 0.0665 0.1224 0.0880 0.0313 0.0308
The accuracy of same point in different group
17
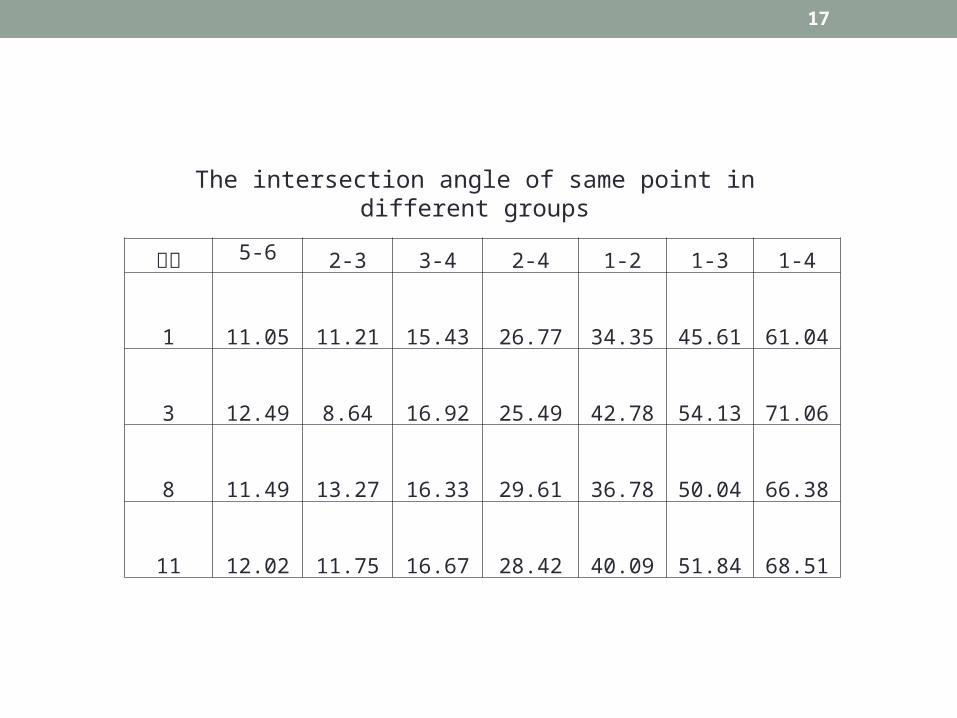
点名 5-6 2-3 3-4 2-4 1-2 1-3 1-4
1 11.05 11.21 15.43 26.77 34.35 45.61 61.04
3 12.49 8.64 16.92 25.49 42.78 54.13 71.06
8 11.49 13.27 16.33 29.61 36.78 50.04 66.38
11 12.02 11.75 16.67 28.42 40.09 51.84 68.51
The intersection angle of same point in different groups
18
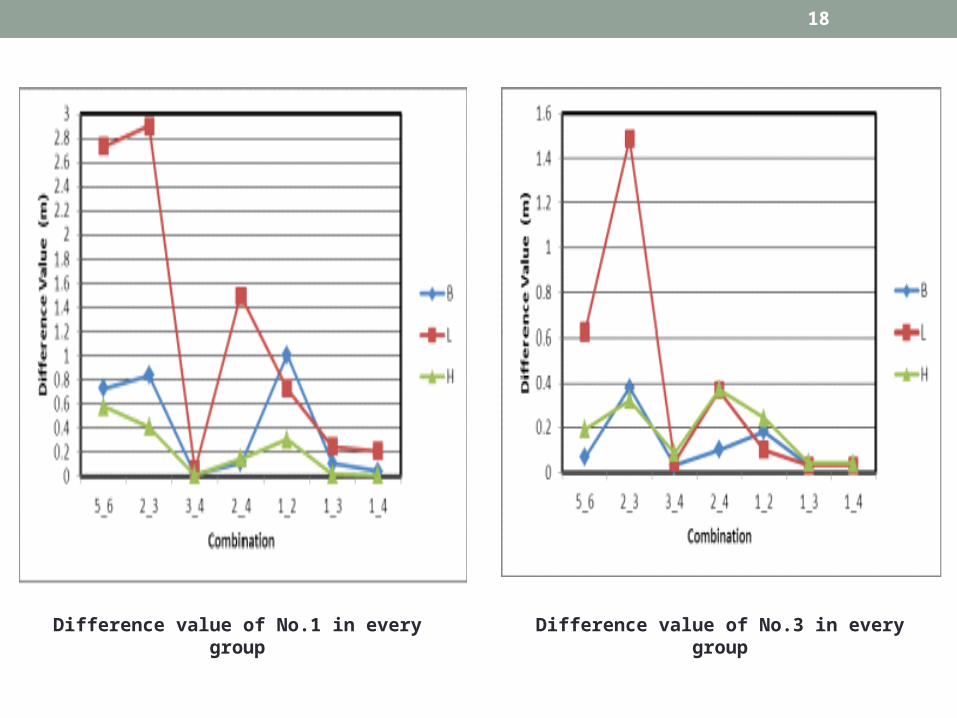
Difference value of No.1 in every group Difference value of No.3 in every group

19
Difference value of No.8in every group Difference value of No.11 in every group

20
From the calculated results from the Table 1 and Table 2, the following three aspects which affect the accuracy can be obtained.
1 The intersection angle of the image
2 The distance between feature points and collection point of the image
3 The geometric relation of collection points and feature points

21
5 CONCLUSIONS
• when the information collection systems of GPS close-range photogrammetry is used to measure unreachable areas or the conventional method is difficult to measure. the following operating principles should be obeyed:
• 1. Ensure that the intersection angle of the image at least greater than 40 °.
• 2. The distance between feature points and collection point of the image shouldn’t be too close, it should be at least greater than 50m.

22
• 3. The baseline formed by the two image collection point should be to keep the plane parallel with the target feature point, then obtain a better geometric relationship.
• 4. Height difference between two image collection point can improve the accuracy.