Embed Size (px)
Citation preview
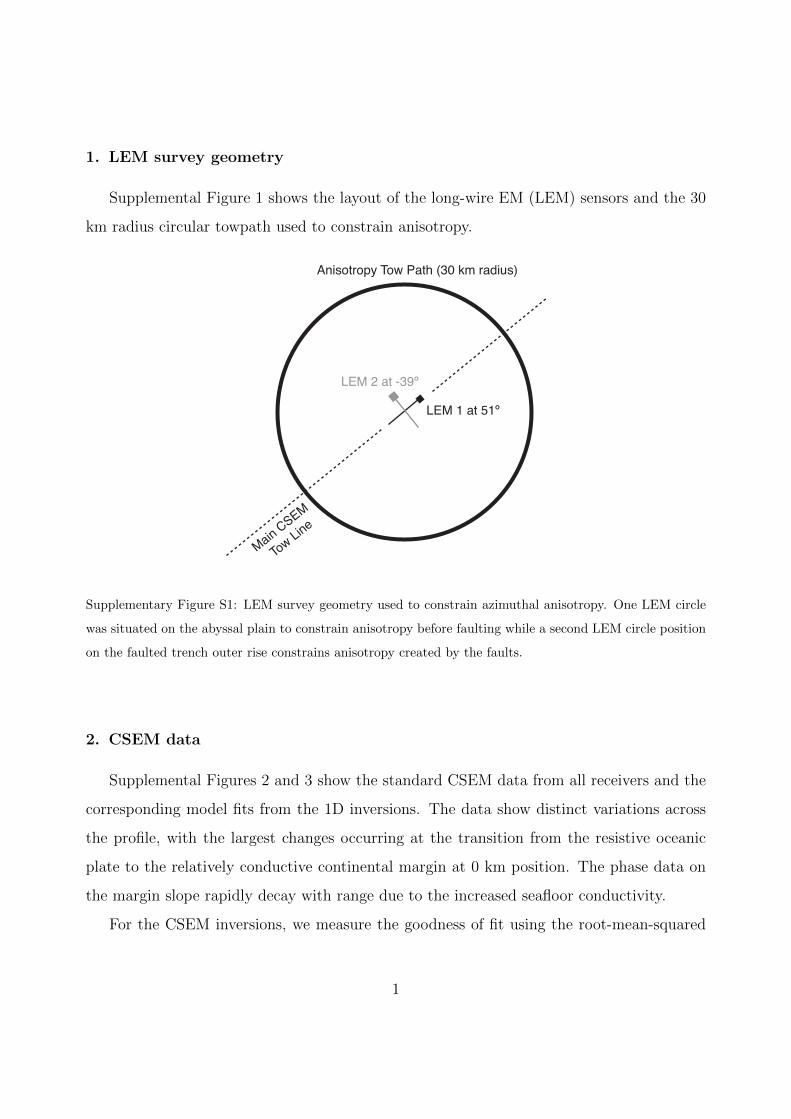
1. LEM survey geometry
Supplemental Figure 1 shows the layout of the long-wire EM (LEM) sensors and the 30
km radius circular towpath used to constrain anisotropy.
LEM 1 at 51º
LEM 2 at -39º
Anisotropy Tow Path (30 km radius)
Main CSEM
Tow Line
Supplementary Figure S1: LEM survey geometry used to constrain azimuthal anisotropy. One LEM circle
was situated on the abyssal plain to constrain anisotropy before faulting while a second LEM circle position
on the faulted trench outer rise constrains anisotropy created by the faults.
2. CSEM data
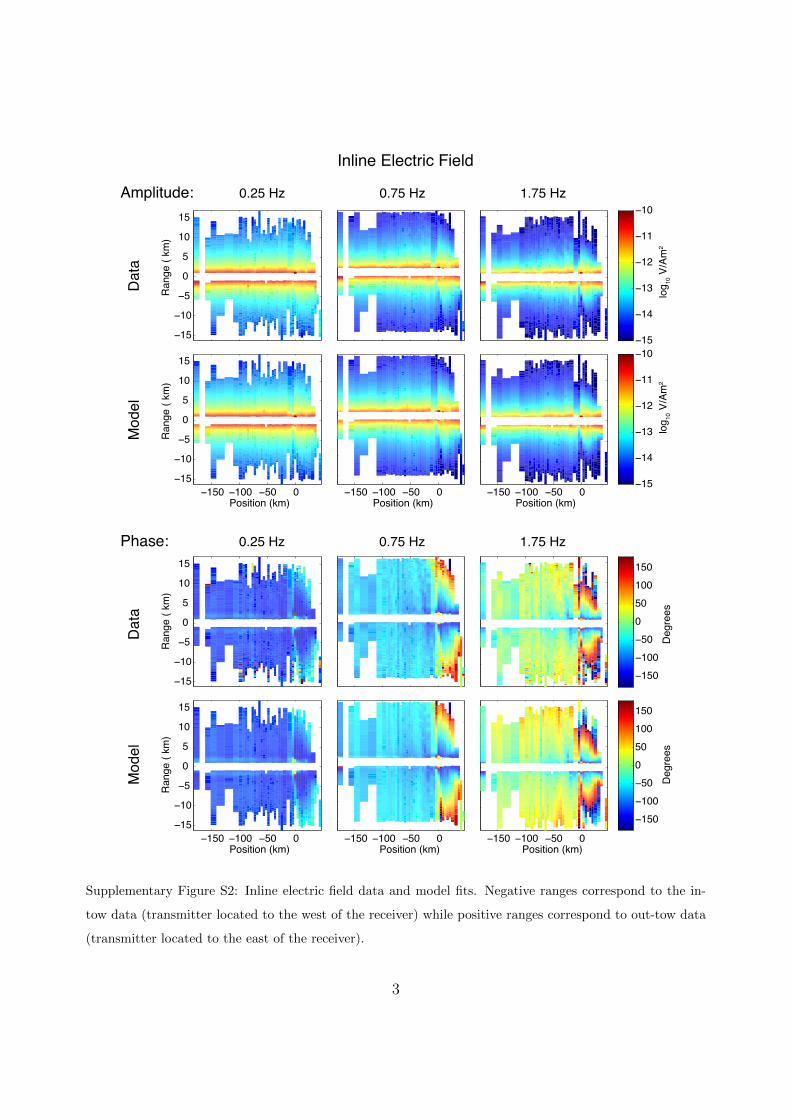
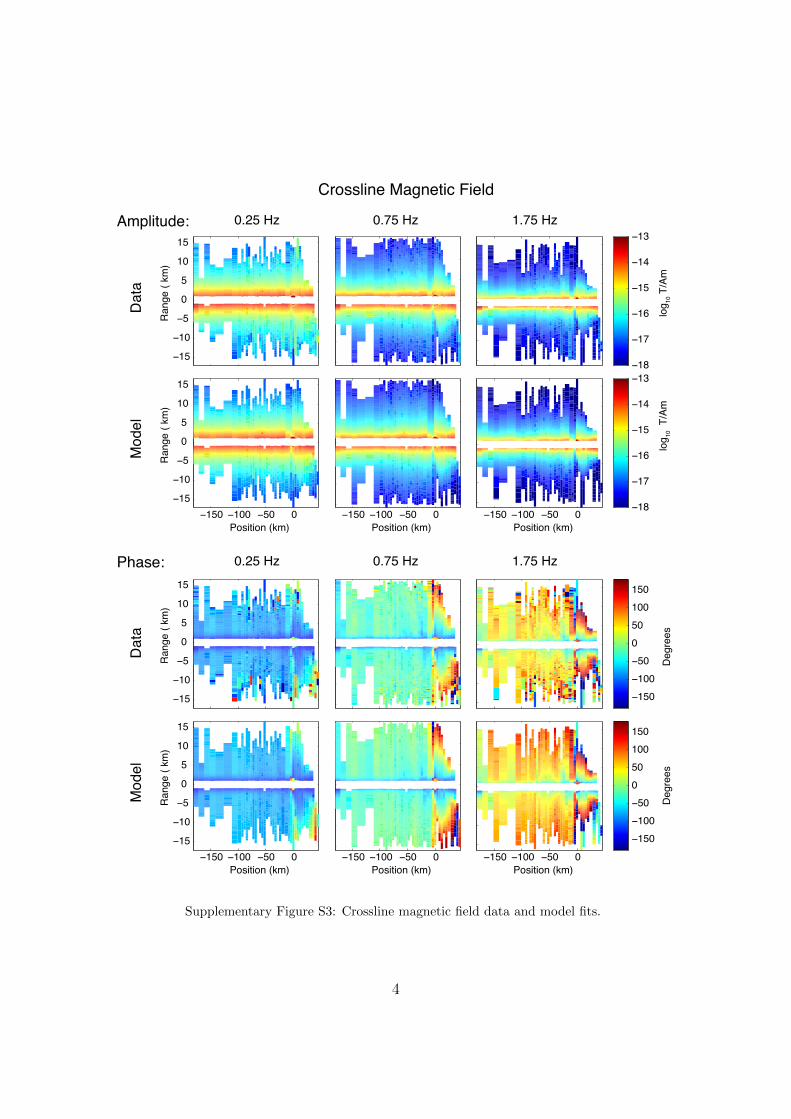
Supplemental Figures 2 and 3 show the standard CSEM data from all receivers and the
corresponding model fits from the 1D inversions. The data show distinct variations across
the profile, with the largest changes occurring at the transition from the resistive oceanic
plate to the relatively conductive continental margin at 0 km position. The phase data on
the margin slope rapidly decay with range due to the increased seafloor conductivity.
For the CSEM inversions, we measure the goodness of fit using the root-mean-squared
1

(RMS) error:
RMS =
√√√√ 1
n
n∑i=1
[di −mi
si
]2, (1)
where n is the number of data, si is the standard error of the ith datum di (i.e. an electric
or magnetic field at a given frequency, receiver and transmitter location) and mi is the
corresponding model response.
2
−15
−10
−5
0
5
10
15
Ran
ge (
km)
−150 −100 −50 0−15
−10
−5
0
5
10
15
Position (km)
Ran
ge (
km)
Dat
aM
odel
D
ata
Mod
el
−15
−10
−5
0
5
10
15
Ran
ge (
km)
−150 −100 −50 0−15
−10
−5
0
5
10
15
Position (km)
Ran
ge (
km)
−150 −100 −50 0Position (km)
−150 −100 −50 0Position (km)
−150 −100 −50 0Position (km)
−150 −100 −50 0Position (km)
−15
−14
−13
−12
−11
−10
−15
−14
−13
−12
−11
−10
−150−100−50050100150
−150−100−50050100150
0.25 HzAmplitude:
Phase:
Inline Electric Field
0.75 Hz 1.75 Hz
log 10
V/A
m2
Deg
rees
Deg
rees
log 10
V/A
m2
0.25 Hz 0.75 Hz 1.75 Hz
Supplementary Figure S2: Inline electric field data and model fits. Negative ranges correspond to the in-
tow data (transmitter located to the west of the receiver) while positive ranges correspond to out-tow data
(transmitter located to the east of the receiver).
3
−15
−10
−5
0
5
10
15
Ran
ge (
km)
−150 −100 −50 0−15
−10
−5
0
5
10
15
Ran
ge (
km)
Position (km)
−15
−10
−5
0
5
10
15
Ran
ge (
km)
−150 −100 −50 0−15
−10
−5
0
5
10
15
Ran
ge (
km)
Position (km)
−150 −100 −50 0Position (km)
−150 −100 −50 0Position (km)
−150 −100 −50 0Position (km)
−150 −100 −50 0Position (km)
−18
−17
−16
−15
−14
−13
−18
−17
−16
−15
−14
−13
−150−100−50050100150
−150−100−50050100150
Dat
aM
odel
D
ata
Mod
el
0.25 HzAmplitude:
Phase:
Crossline Magnetic Field
0.75 Hz 1.75 Hz
0.25 Hz 0.75 Hz 1.75 Hz
log 10
T/A
mD
egre
esD
egre
eslo
g 10 T
/Am
Supplementary Figure S3: Crossline magnetic field data and model fits.
4