Embed Size (px)
Citation preview

1
L-BFGS and Delayed Dynamical Systems Approach for Unconstrained Optimization
Xiaohui XIE
Supervisor: Dr. Hon Wah TAM

2
Outline
Problem background and introduction Analysis for dynamical systems with time delay
Introduction of dynamical systems Delayed dynamical systems approach Uniqueness property of dynamical systems
Numerical testing Main stages of this research APPENDIX
3
1. Problem background and introduction
Optimization problems are classified into four parts, our research is focusing on unconstrained optimization problems.
(UP)
1min : nf x f R Rnx R

4
Descent direction
A common theme behind all these methods is to find a direction so that there exists an such that
np x R 0
.,0 xfpxf

5
Steepest descent method
For (UP), is a descent direction at
or is a descent direction for .
p
0T
f x p
x
xfp 2
/ xfxfp f x

6
Method of Steepest Descent
Find that solves
Then
Unfortunately, the steepest descent method converges only linearly, and sometimes very slowly linearly.
k .min0
kk xfxf
1 .k k k kx x f x

7
Newton’s method
Newton’s direction— Newton’s method
Given , compute
Although Newton’s method converges very fast, the Hessian matrix is difficult to compute.
kk xfxf 12
0x 12
1 ,k k k kx x f x f x
1.k k

8
Quasi-Newton method—BFGS
Instead of using the Hessian matrix, the quasi-Newton methods approximate it.
In quasi-Newton methods, the inverse of the Hessian matrix is approximated in each iteration by a positive definite (p.d.) matrix, say .
being symmetric and p.d. implies the descent property.
kH
k k kp H f x
kH
9
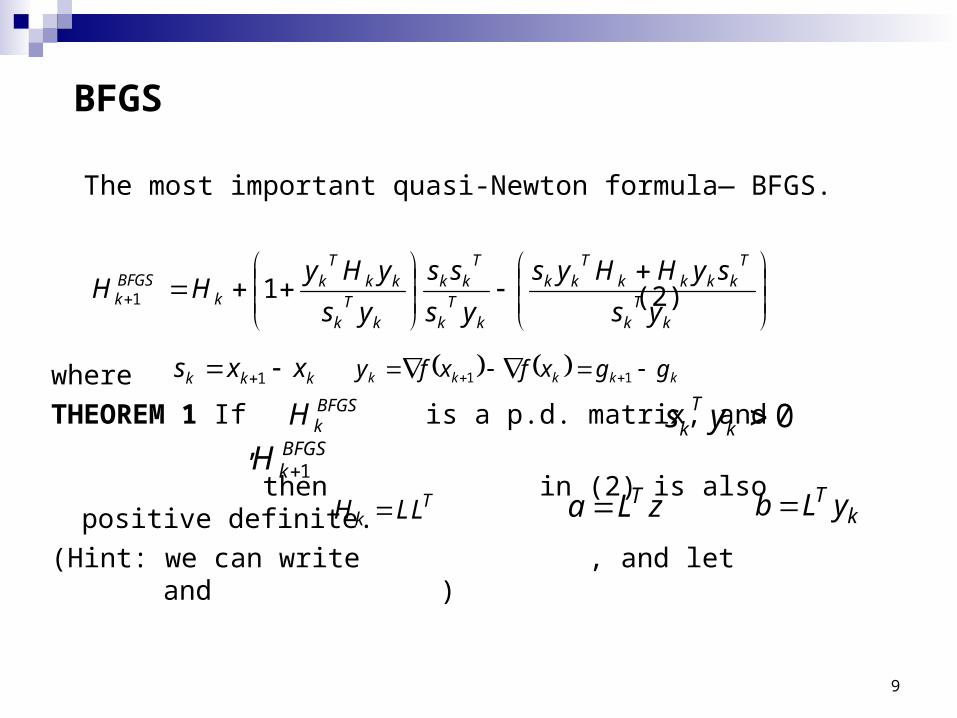
BFGS
The most important quasi-Newton formula— BFGS.
(2)
where
THEOREM 1 If is a p.d. matrix, and ,
then in (2) is also positive definite.
(Hint: we can write , and let and )
kT
k
Tkkkk
Tkk
kT
k
Tkk
kT
k
kkT
kk
BFGSk
ys
syHHys
ys
ss
ys
yHyHH 11
BFGSkH 0k
Tk ys
BFGSkH 1
TkH LL Ta L z T
kb L y
kkk xxs 1 kkkkk ggxfxfy 11

10
Limited-Memory Quasi-Newton Methods —L-BFGS
Limited-memory quasi-Newton methods are useful for solving large problems whose Hessian matrices cannot be computed at a reasonable cost or are not sparse.
Various limited-memory methods have been proposed; we focus mainly on an algorithm known as L-BFGS.
(3)
Tkkkkk
Tkk ssVHVH 1
Tkkkk
kT
k
k syIVsy
,1
kkk xxs 1 kkk ffy 1

11
The L-BFGS approximation satisfies the following formula:
for
(6)
for
(7)
mk 11 1 0 0 0 1
1 0 0 0 1
1 2 2 2 1
1 1 1
.
T T Tk k k k k
T T Tk k
T T Tk k k k k k k
T Tk k k k k
Tk k k
H V V V H V V V
V V s s V V
V V s s V V
V s s V
s s
mk 1 1 1 1 0 1 1
2 1 1 1 2
1 2 2 2 1
1 1 1
.
T T Tk k k k m k m k k
T T Tk k m k m k m k m k m k
T T Tk k k k k k k
T Tk k k k k
Tk k k
H V V V H V V V
V V s s V V
V V s s V V
V s s V
s s
1kH

12
2. Analysis for dynamical systems with time delay
The unconstrained problem (UP) is reproduced. (8)
It is very important that the optimization problem is posted in the continuous form, i.e. x can be changed continuously.
The conventional methods are addressed in the discrete form.
1min :n
n
x Rf x f R R

13
Dynamical system approach
The essence of this approach is to convert (UP) into a dynamical system or an ordinary differential equation (o.d.e.) so that the solution of this problem corresponds to a stable equilibrium point of this dynamical system.
Neural network approach
The mathematical representation of neural network is an ordinary differential equation which is asymptotically stable at any isolated solution point.

14
Consider the following simple dynamical system or ode
(9)
DEFINITION 1. (Equilibrium point). A point is called an equilibrium point of (9) if .
DEFINITION 3. (Convergence). Let be the solution of (9). An isolated equilibrium point is convergent if there exists a such that if , as .
xpdt
tdx
* nx R * 0p x
x t*x 0
*0x t x *x t x t

15
Some Dynamical system versions
Based on the steepest descent direction
Based on the Newton’s direction
Other dynamical systems
dxf x t
dt
12dx tf x t f x t
dt
dx ts t p x t
dt
2
2
d x t dx ta t b t B x t p x t
dt dt

16
Dynamical system approach can solve very large problems.
How to find a “good” ? The dynamical system approach normally consists of the
following three steps: to establish an ode system to study the convergence of the solution of the ode as
; and to solve the ode system numerically.
Even though the solutions of ode systems are continuous, the actual computation has to be done discretely.
p x
x t
t

17
Delayed dynamical systems approach
steepest
descent
direction
slow convergence
Newton’s
direction
difficult to compute
fast convergence and easy to calculate

18
The delayed dynamical systems approach solves the delayed o.d.e. (13)
For , we use
(13A)
Where
To compute at .
,( ( ), ( ( )), ..., ( ( ))) ( )1dx t
H x t x t t x t t f x tmdt
1mt t
1 0 1 1 0
1 2 1 1 2 0 1 0 0 1 1 2 2 1 1
1 2 1 1 2 0 1 0 1 0 1 1 2 2 1 1
1 2 1 2 1 2 1 1
1 1 1
, , , : , , , ,
:
.
m m m
T T T T
m m m m m m
T T T T
m m m m m m
T T
m m m m m m m m
T
m m m
H x t x t x t H x t x t x t x t
V t V t V t V t H V t V t V t V t
V t V t V t t s t s t V t V t V t
V t t s t s t V t
t s t s t
1 1 1 1
1 1 1 11
1 1
,
1, .
m m m m
T
m m m mT m
m m
s t x t x t y t f x t f x t
t V t I t y t s ty t s t
mx mt
19
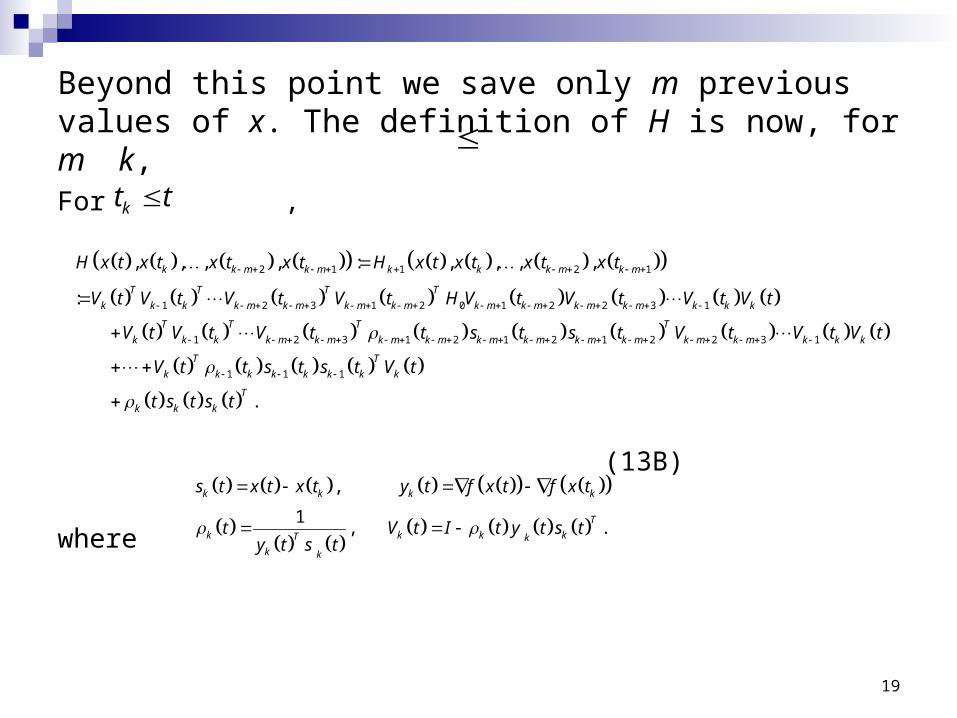
Beyond this point we save only m previous values of x. The definition of H is now, for m k,
For ,
(13B)
where
kt t
2 1 1 2 1
1 2 3 1 2 0 1 2 2 3 1
1 2 3 1 2 1 2 1 2 2
, , , , : , , , ,
:
k k m k m k k k m k m
T T T T
k k k k m k m k m k m k m k m k m k m k k k
T T T T
k k k k m k m k m k m k m k m k m k m k m
H x t x t x t x t H x t x t x t x t
V t V t V t V t H V t V t V t V t
V t V t V t t s t s t V
3 1
1 1 1
.
k m k k k
T T
k k k k k k k k
T
k k k
t V t V t
V t t s t s t V t
t s t s t
,
1, .
k k k k
T
k k k kT k
k k
s t x t x t y t f x t f x t
t V t I t y t s ty t s t
Uniqueness property of dynamical systems
20
2121 )()( xxLxFxF
Lipschitz continuity
,)(),()(),( 1 uuLufwuHufwuH
.)(),()(),( 2 wwLufwuHufwuH

Lemma 2.6
Let be continuously differentiable in the open convex set , and let be Lipschitz continuous at in the neighborhood using a vector norm and the induced matrix operator norm and the Lipschitz constant . Then, for any
: n mF R R,nD R x D F
Jx
x D
,x p D
2( ) ( ) ( )
2F x p F x J x p p

3. Numerical testing
Test problems
● Extended Rosenbrock function
● Penalty function Ⅰ● Variable dimensioned function
● Linear function-rank 1
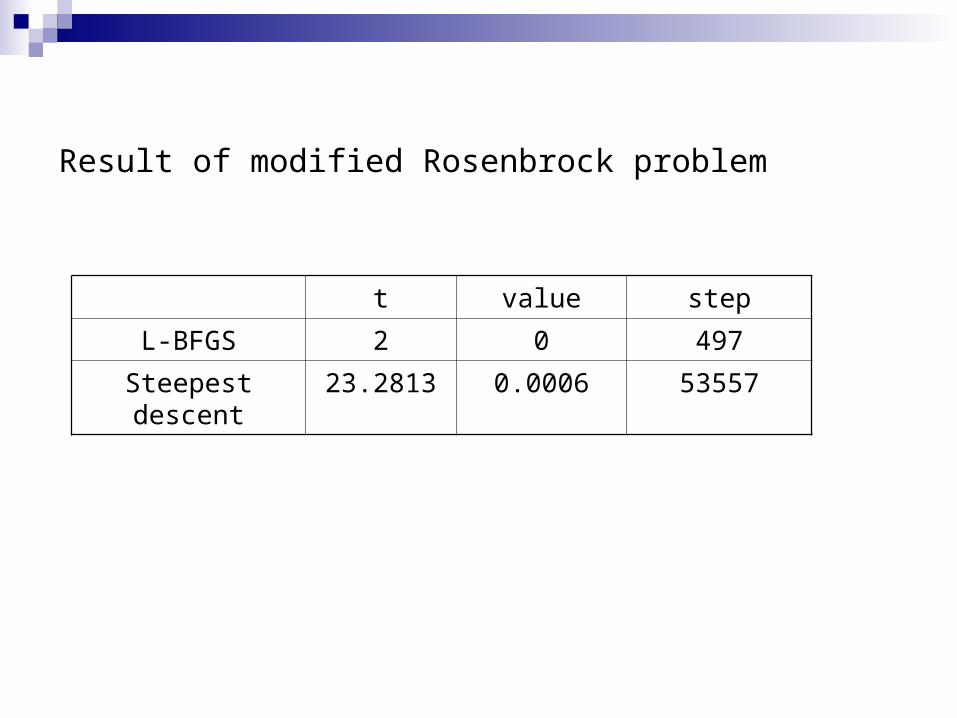
Result of modified Rosenbrock problem
t value step
L-BFGS 2 0 497
Steepest descent 23.2813 0.0006 53557

Comparison of function value
m = 2
m = 4
m = 6
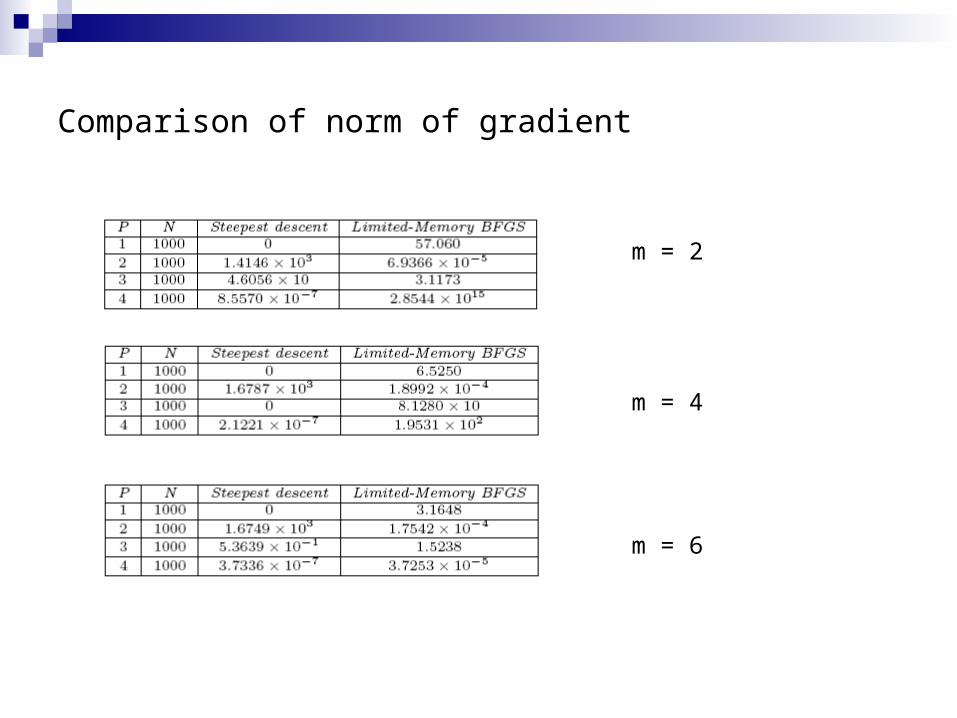
Comparison of norm of gradient
m = 2
m = 4
m = 6
A new code — Radar 5
The code RADAR5 is for stiff problems, including differential-algebraic and neutral delay equations with constant or state-dependent (eventually vanishing) delays.
1'( ) ( , ( ), ( ( , ( ))), , ( ( , ( ))))mMy t f t y t y t t y t y t t y t
0 0 0( ) , ( ) ( )y t y y t g t for t t
27
4. Main stages of this research
Prove that the function H in (13) is positive definite. (APPENDIX)
Prove that H is Lipschitz continuous. Show that the solution to (13) is asymptotically stable. Show that (13) has a better rate of convergence than the
dynamical system based on the steepest descent direction.
Perform numerical testing. Apply this new optimization method to practical
problems.

28
APPENDIX To show that H in (13) is positive definite
Property 1. If is positive definite, the matrix defined by (13) is positive definite (provided for all ).
I proved this result by induction. Since the continuous analog of the L-BFGS formula has two cases, the proof needs to cater for each of them.
0H
0iT
i sy iH
29
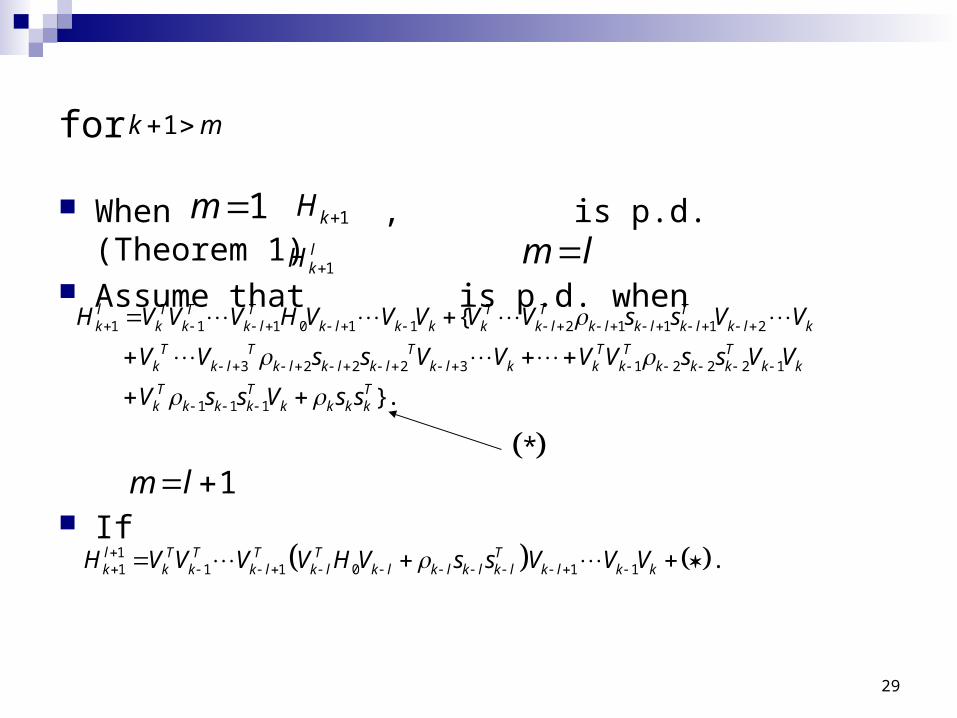
for
When , is p.d. (Theorem 1) Assume that is p.d. when
If
1k m
1m 1kH
1lkH
m l
1m l
1 1 1 0 1 1 2 1 1 1 2
3 2 2 2 3 1 2 2 2 1
1 1 1
{
}.
l T T T T T Tk k k k l k l k k k k l k l k l k l k l k
T T T T T Tk k l k l k l k l k l k k k k k k k k
T T Tk k k k k k k k
H V V V H V V V V V s s V V
V V s s V V V V s s V V
V s s V s s
*
11 1 1 0 1 1 .l T T T T T
k k k k l k l k l k l k l k l k l k kH V V V V H V s s V V V

30
for
In this case there is no exists.
By the assumption is p.d., it is obvious that
is also p.d..
1k m
m
1T T
k k k k k k kH V H V s s
kH1kH

31




![Shuangjian Guo1, Xiaohui Zhang2, Shengxiang Wang3 arXiv ...arXiv:2002.06017v1 [math.RA] 13 Feb 2020 OnsplitregularHom-Leibniz-Rinehartalgebras Shuangjian Guo1, Xiaohui Zhang2, Shengxiang](https://img.pdfslide.us/doc/110x75/5ffa640993124b7945333343/shuangjian-guo1-xiaohui-zhang2-shengxiang-wang3-arxiv-arxiv200206017v1-mathra.jpg)
























