Embed Size (px)
Citation preview
1
Institute of Mechatronics and Information Systems
Control and Driving Systems
2
Institute of Mechatronics and Information Systems
Lecture programme:
1. Fundamentals of electromagnetic phenomena in electro-mechanic energy conversion
2. Structure and operating principle of modern electrical machines used in driving systems
3. Power supplies – voltage and frequency converters 4. Control modes for chosen mechanical drive parameters 5. Parasitic phenomena 6. Advantages and disadvantages of various driving system
configurations
3
Institute of Mechatronics and Information Systems
Structure and operating principle of modern electrical machines used in driving systems
1. Transformer2. Direct current machine3. Induction machine4. Synchronous machine5. Special configurations

4
Institute of Mechatronics and Information Systems
Induction (asynchronous) machine
5
Institute of Mechatronics and Information Systems
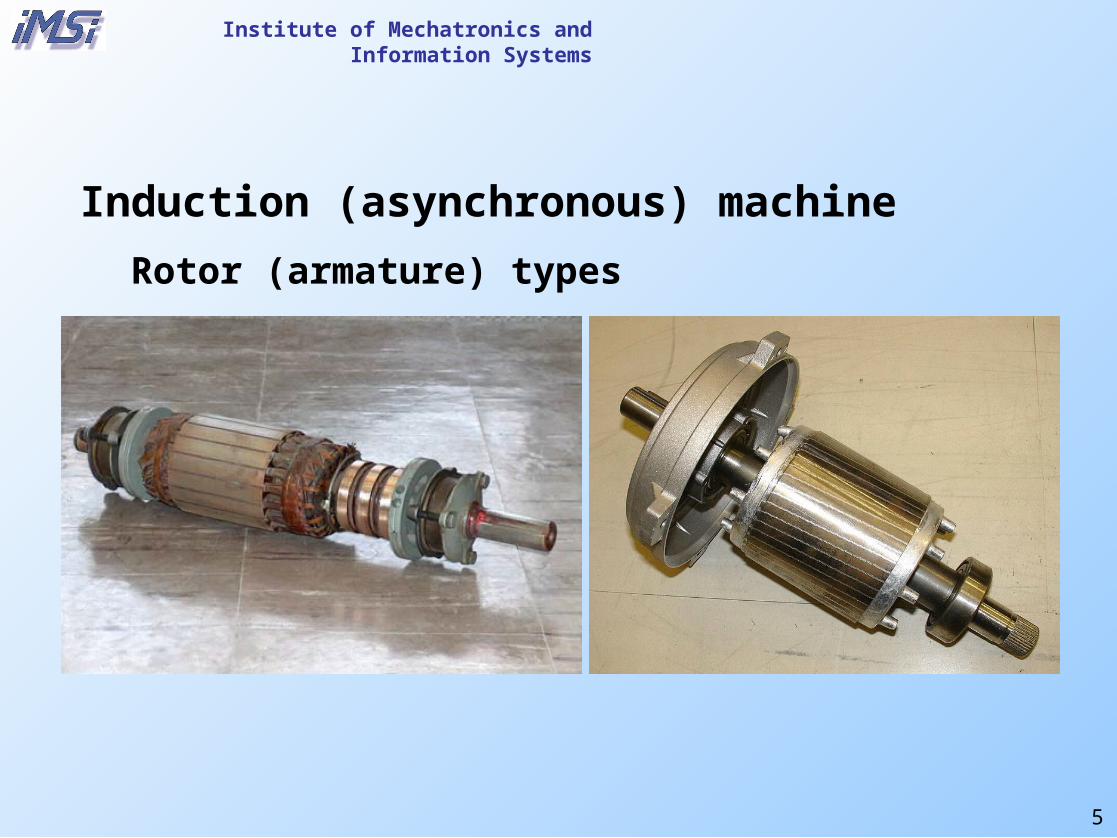
Induction (asynchronous) machine
Rotor (armature) types
6
Institute of Mechatronics and Information Systems
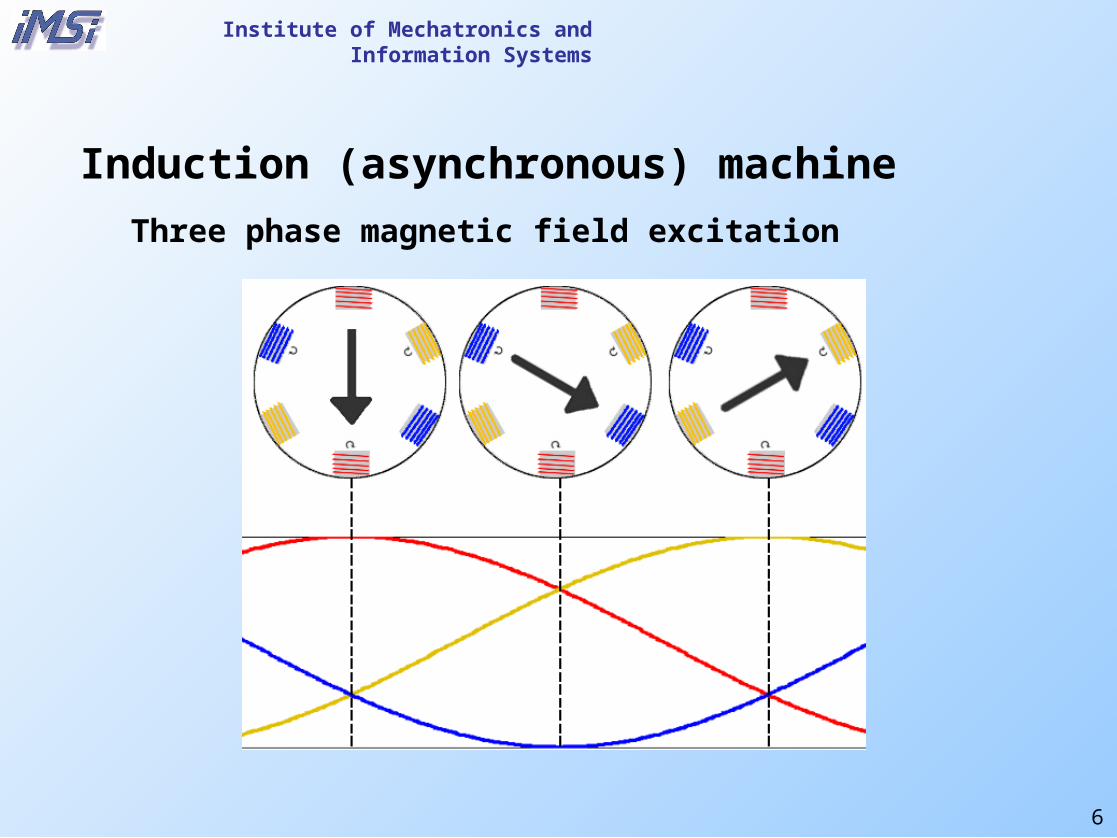
Induction (asynchronous) machine
Three phase magnetic field excitation
7
Institute of Mechatronics and Information Systems
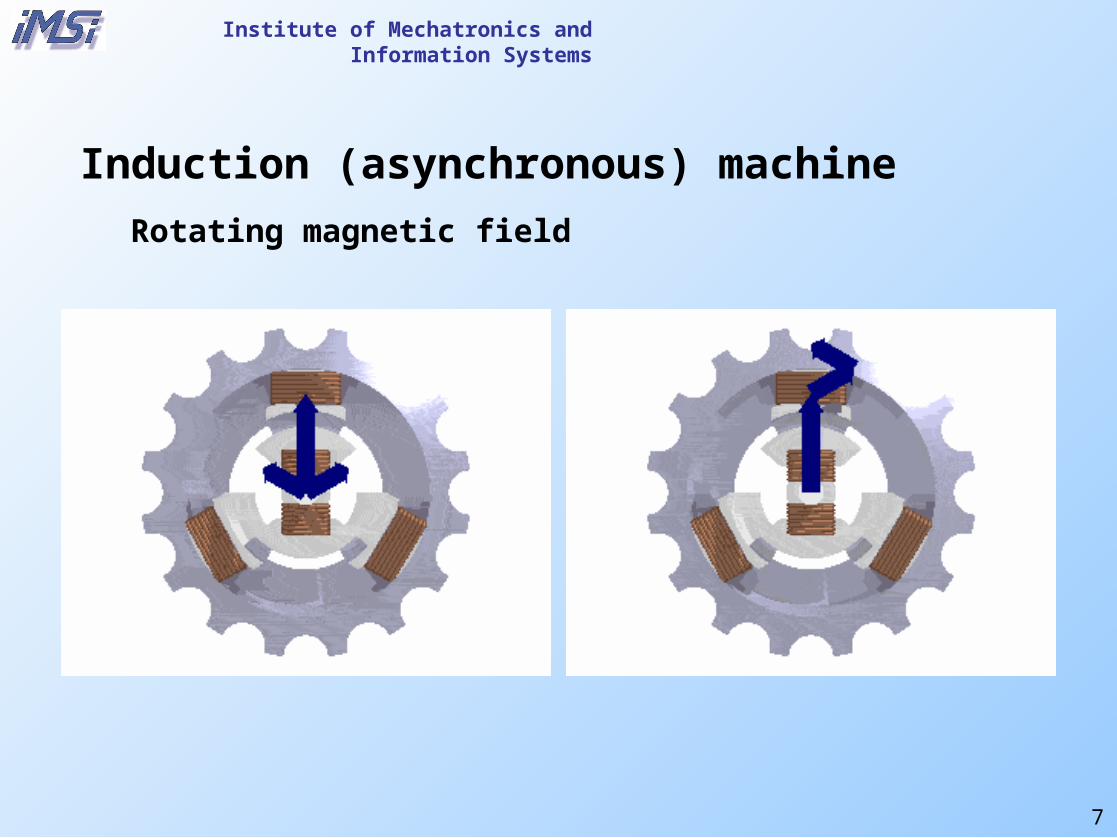
Induction (asynchronous) machine
Rotating magnetic field
8
Institute of Mechatronics and Information Systems
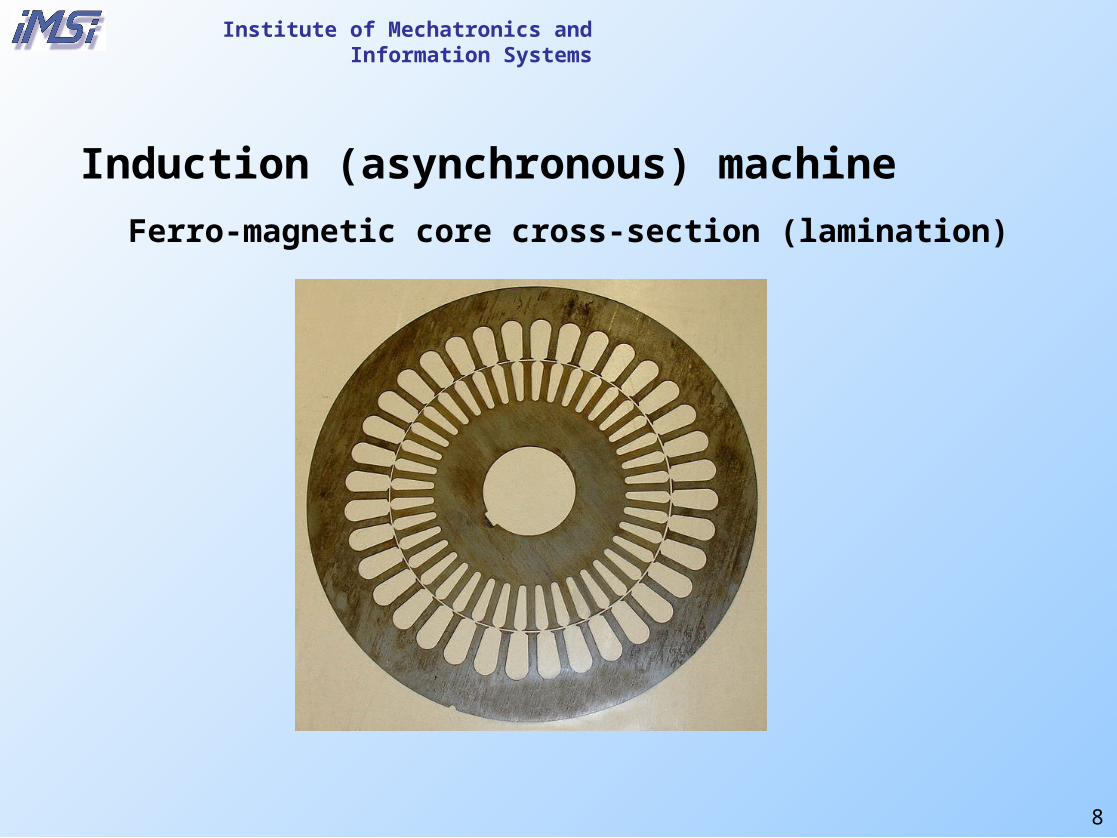
Induction (asynchronous) machine
Ferro-magnetic core cross-section (lamination)
9
Institute of Mechatronics and Information Systems
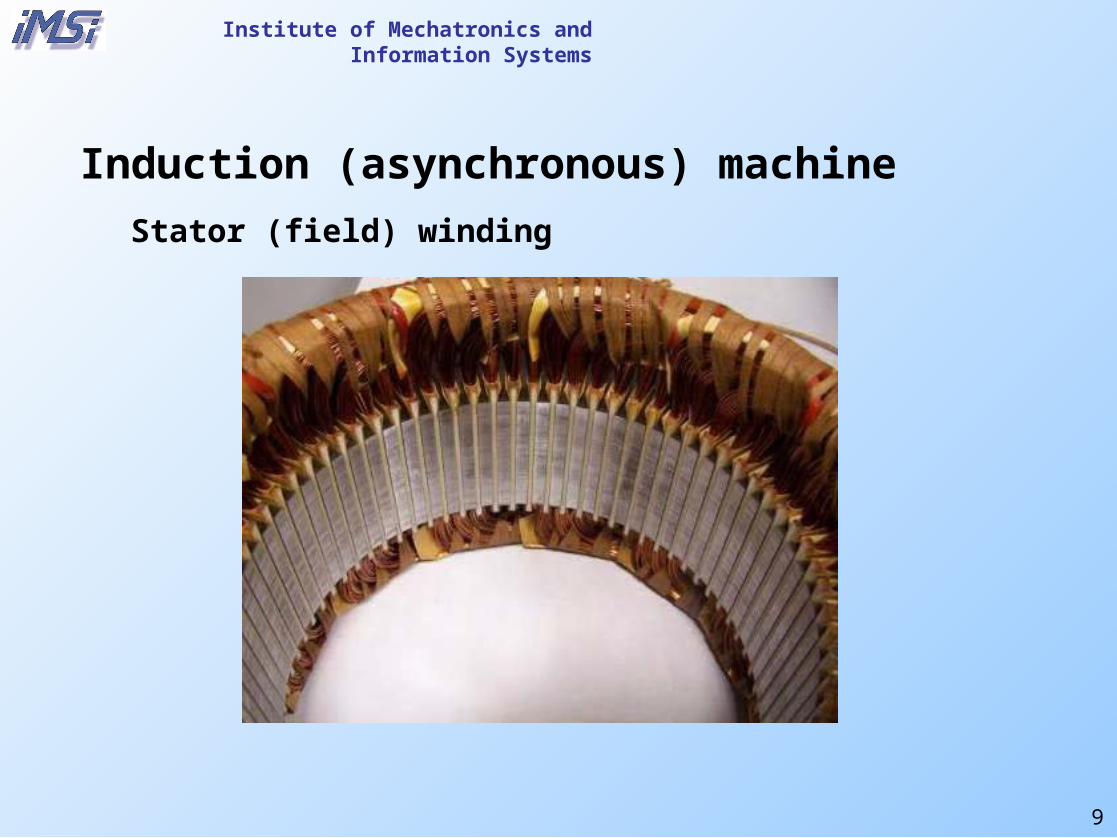
Induction (asynchronous) machine
Stator (field) winding
10
Institute of Mechatronics and Information Systems
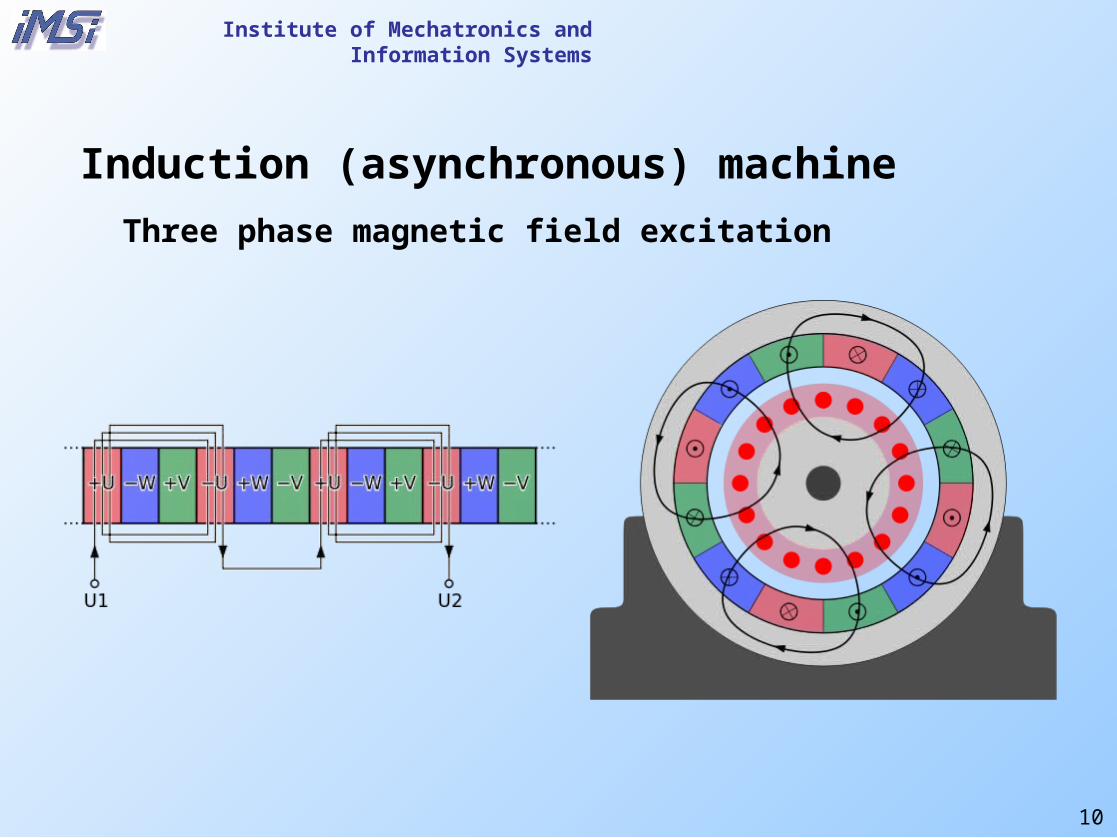
Induction (asynchronous) machine
Three phase magnetic field excitation
11
Institute of Mechatronics and Information Systems
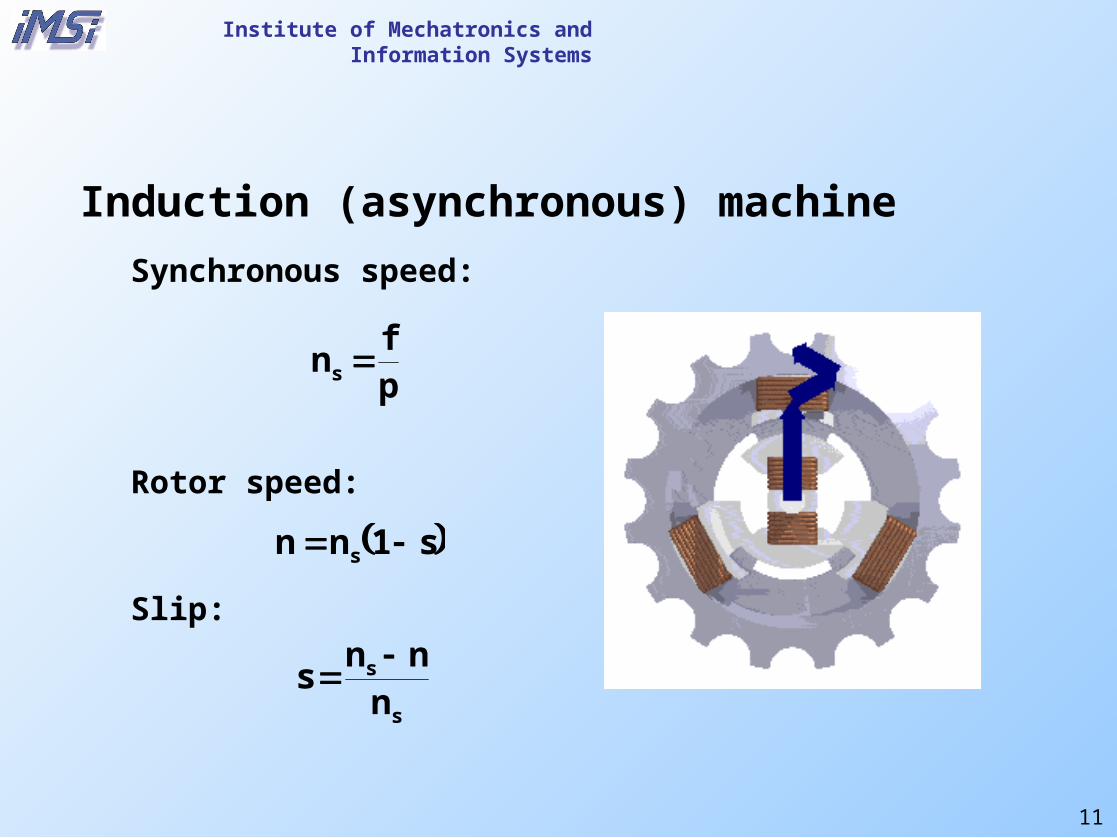
Induction (asynchronous) machine
Synchronous speed:
Rotor speed:
Slip:
pf
ns
s1nn s
s
s
nnn
s
12
Institute of Mechatronics and Information Systems
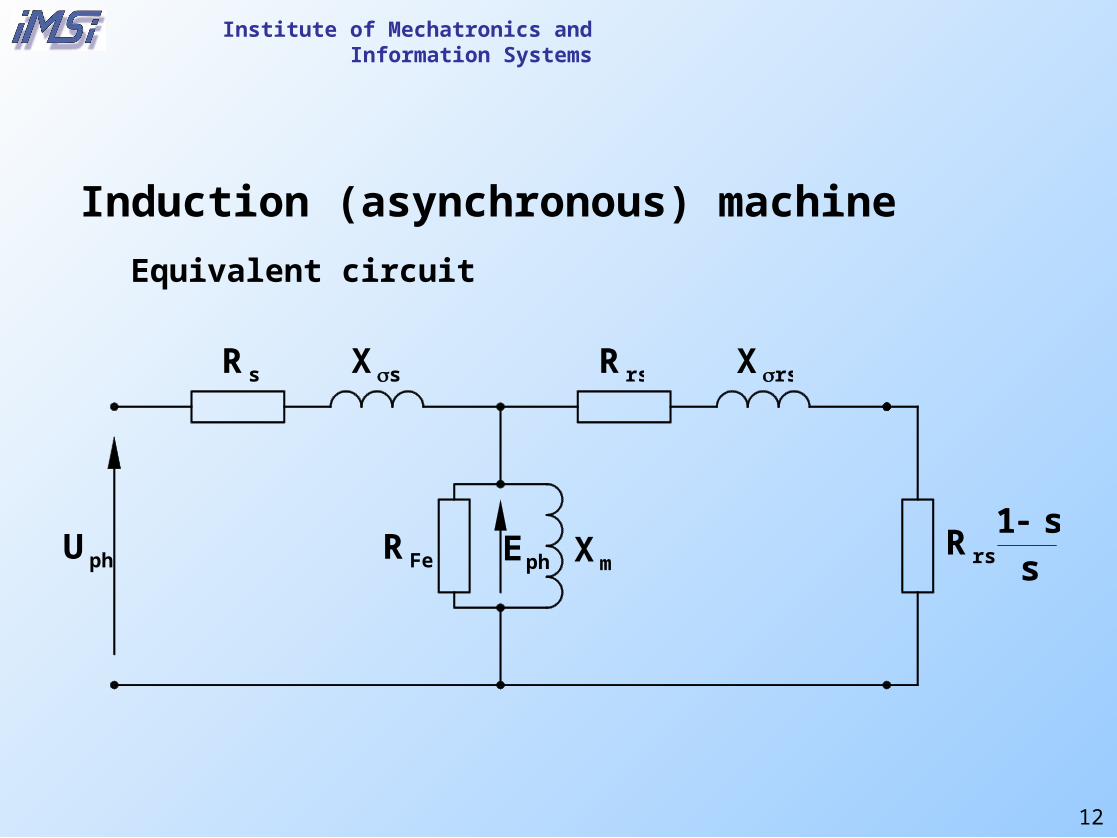
Induction (asynchronous) machine
Equivalent circuit
sR
FeRs
s1Rrs
rsRsX rsX
mXphU phE
13
Institute of Mechatronics and Information Systems
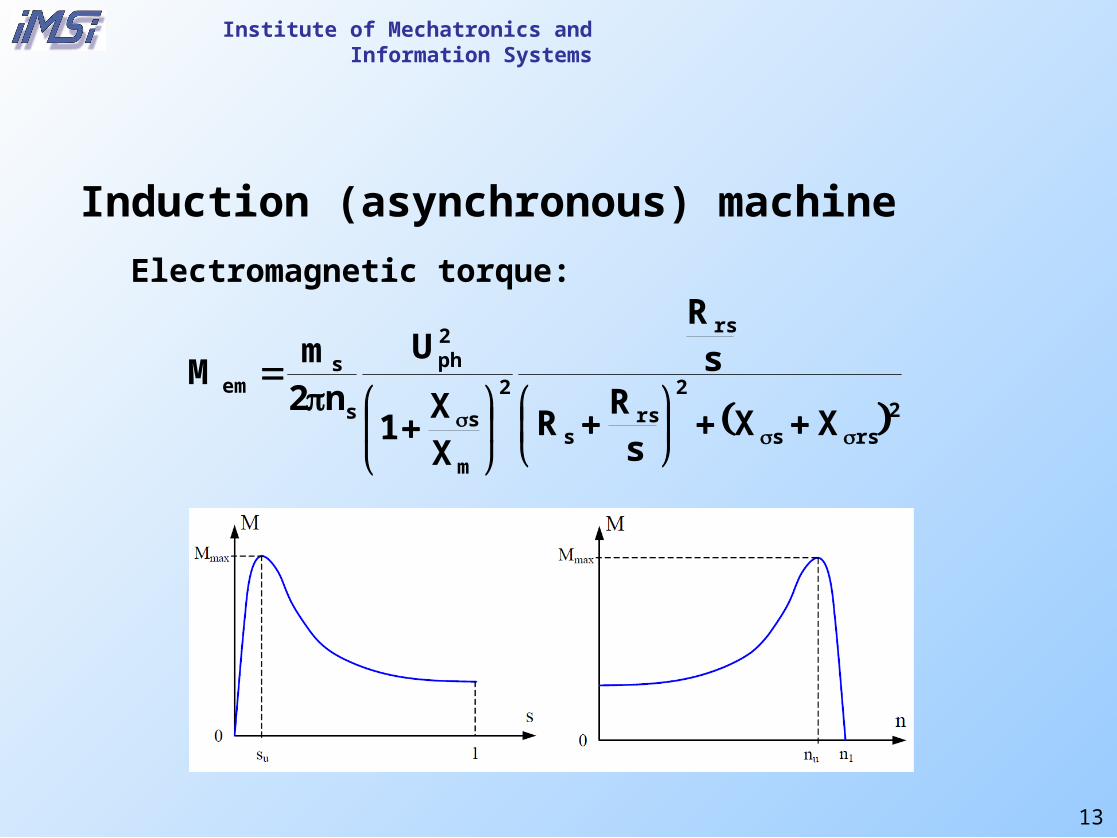
Induction (asynchronous) machine
Electromagnetic torque:
2rss
2
rss
rs
2
m
s
2ph
s
sem
XXs
RR
sR
XX
1
U
n2m
M
14
Institute of Mechatronics and Information Systems
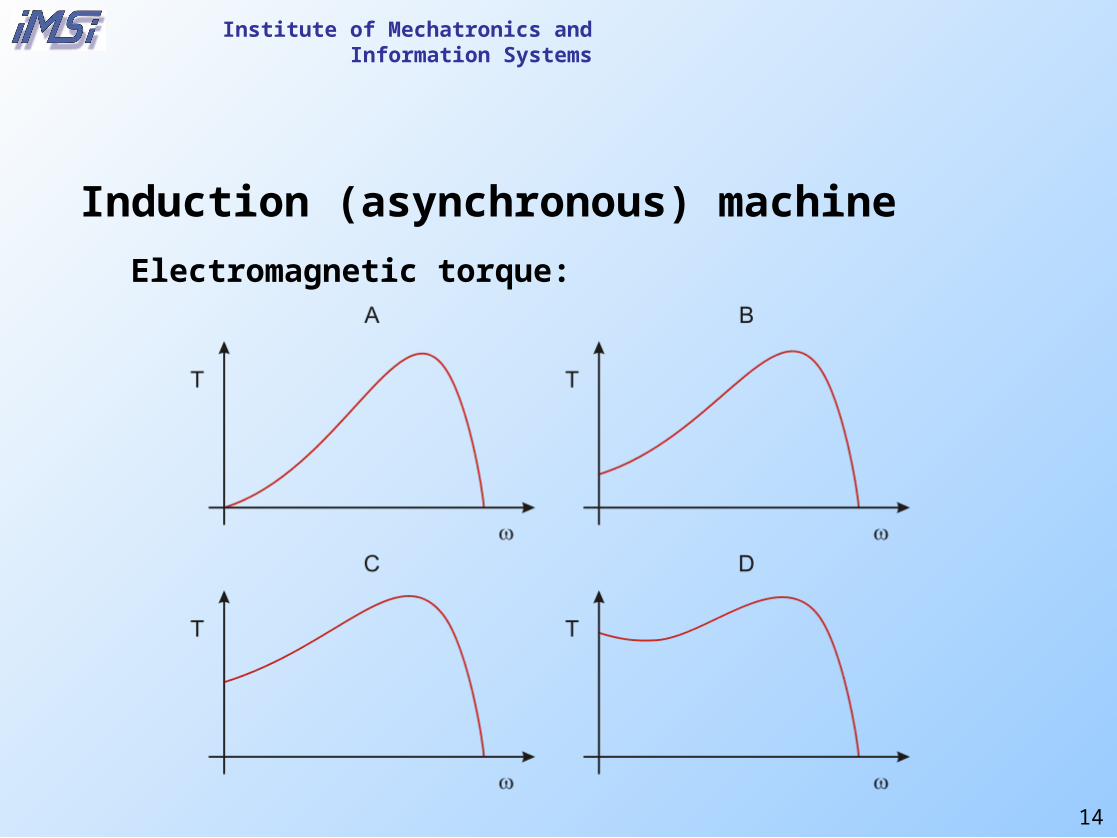
Induction (asynchronous) machine
Electromagnetic torque:
15
Institute of Mechatronics and Information Systems
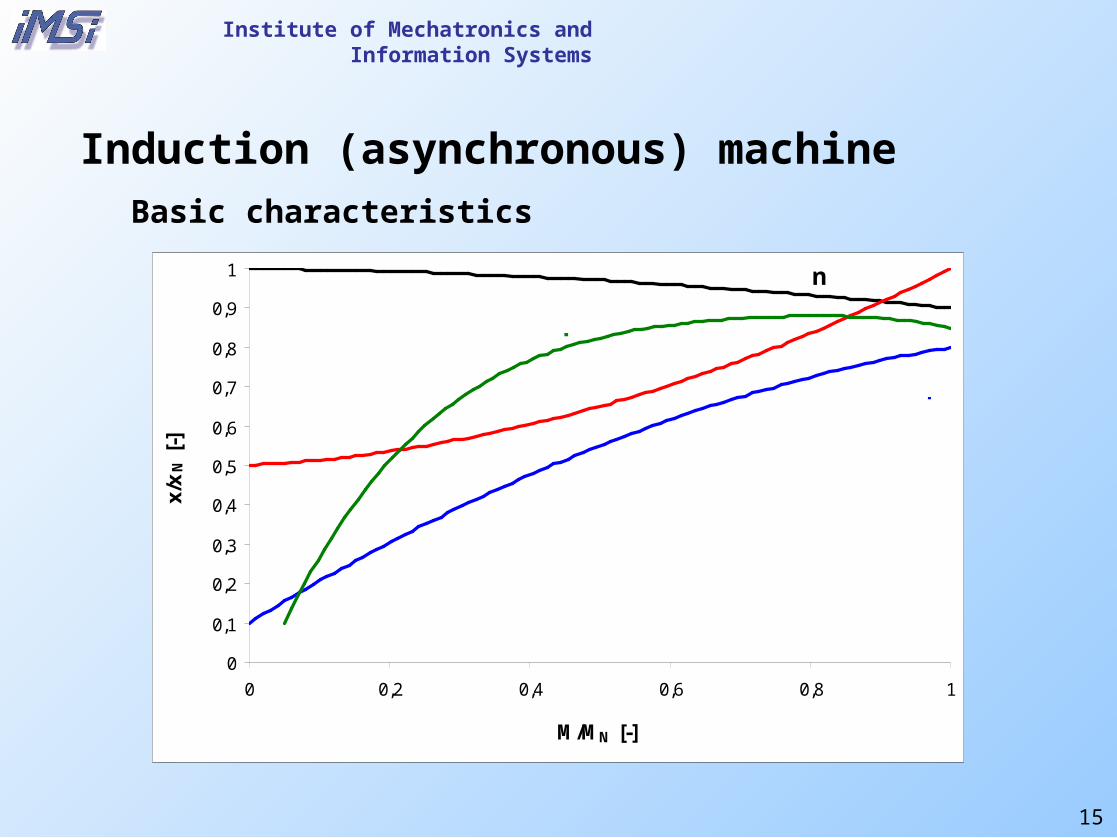
Induction (asynchronous) machineBasic characteristics
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0 0,2 0,4 0,6 0,8 1
M/MN [-]
x/x
N [
-]
n
cosφ
η
I
16
Institute of Mechatronics and Information Systems
Induction (asynchronous) machine
Simplified equations Electromagnetic torque:
Breakdown (maximal) torque:
Breakdown slip:
2rss
2
rs
rs
2ph
s
sem
XXs
Rs
R
Un2
mM
rss
2ph
s
sb XX2
1U
n2m
M
rss
rsb XX
Rs
17
Institute of Mechatronics and Information Systems
Induction (asynchronous) machine
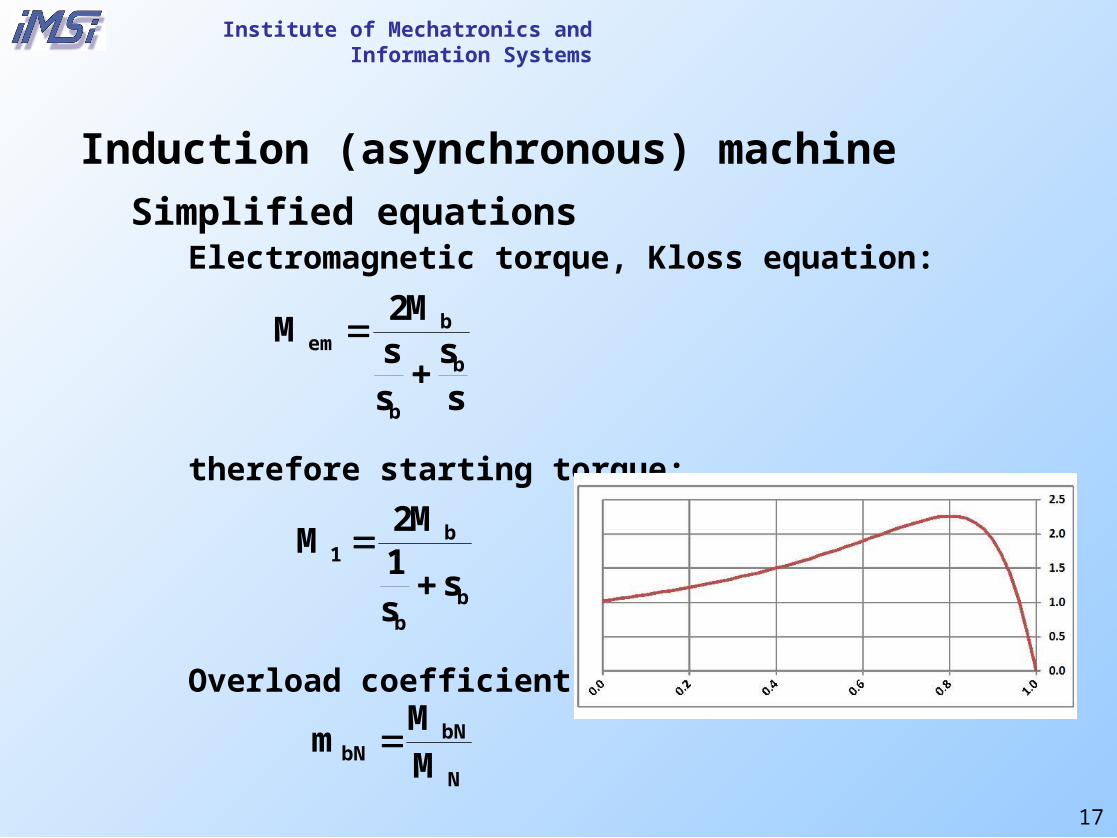
Simplified equations Electromagnetic torque, Kloss equation:
therefore starting torque:
Overload coefficient:
ss
ss
M2M
b
b
bem
bb
b1
ss1
M2M
N
bNbN M
Mm
18
Institute of Mechatronics and Information Systems
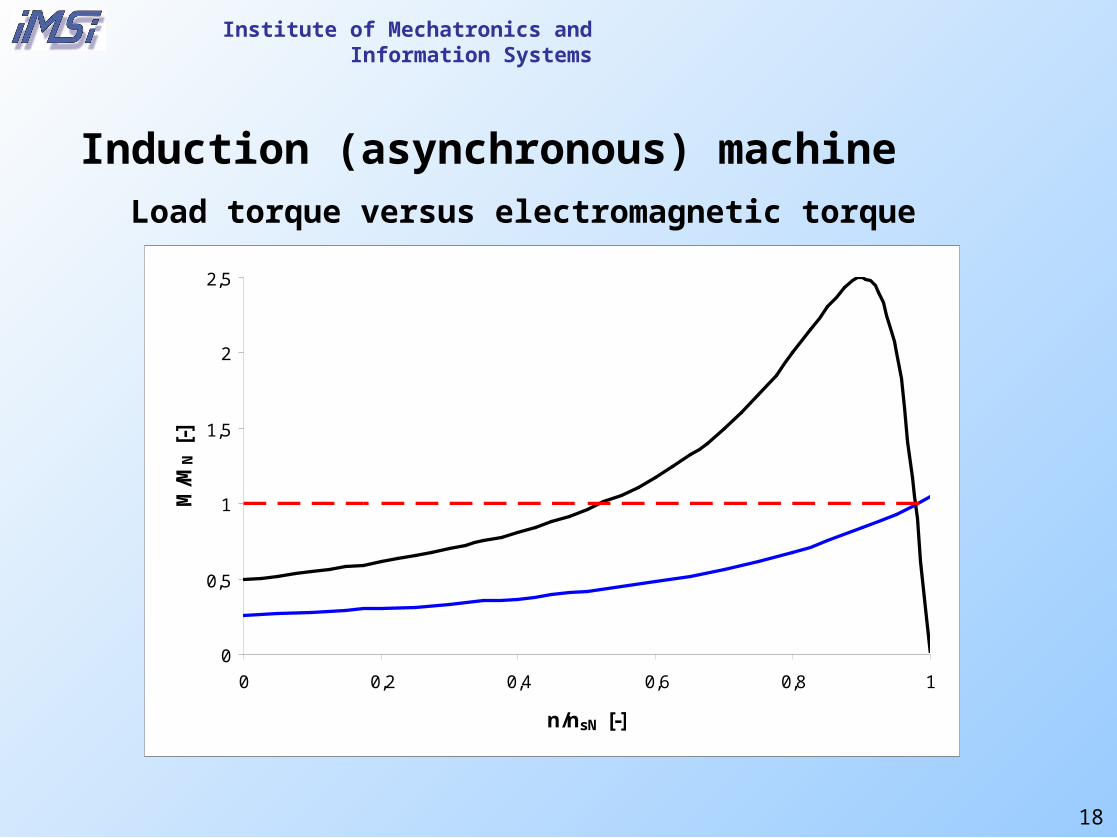
Induction (asynchronous) machineLoad torque versus electromagnetic torque
0
0,5
1
1,5
2
2,5
0 0,2 0,4 0,6 0,8 1
n/nsN [-]
M/M
N [
-]
19
Institute of Mechatronics and Information Systems
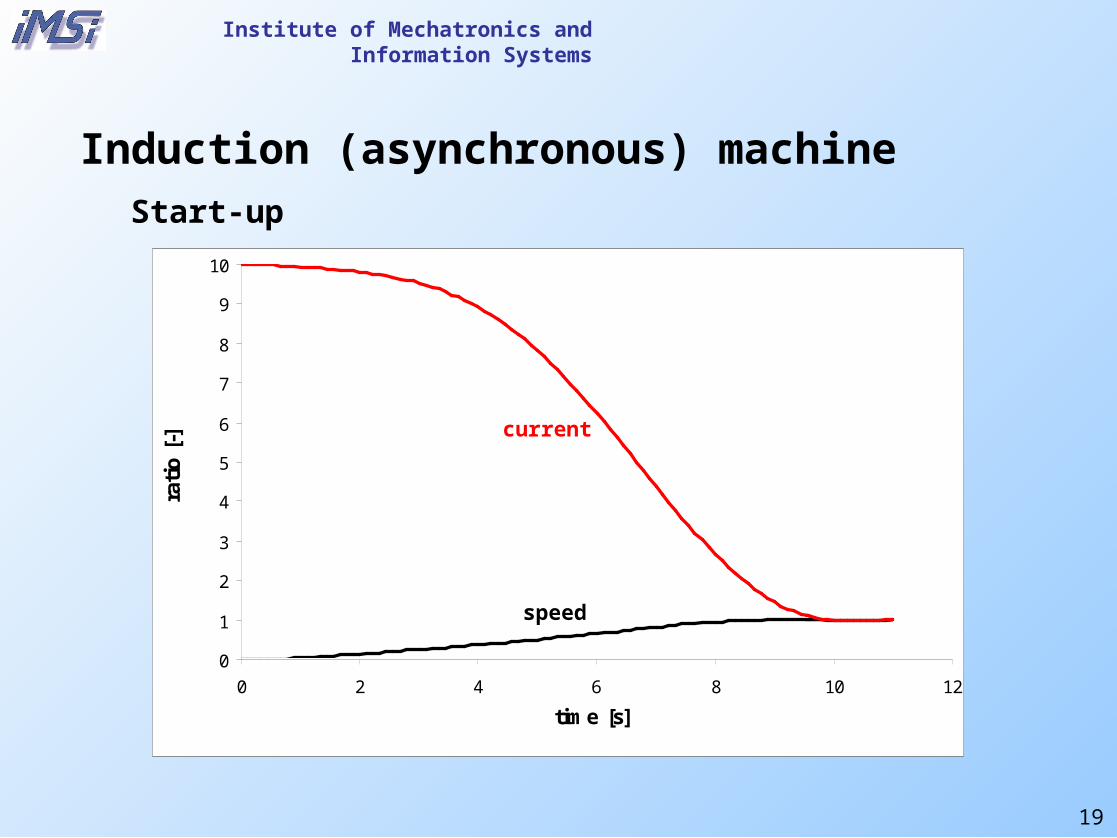
Induction (asynchronous) machineStart-up
0
1
2
3
4
5
6
7
8
9
10
0 2 4 6 8 10 12
time [s]
rati
o [
-] current
speed
20
Institute of Mechatronics and Information Systems
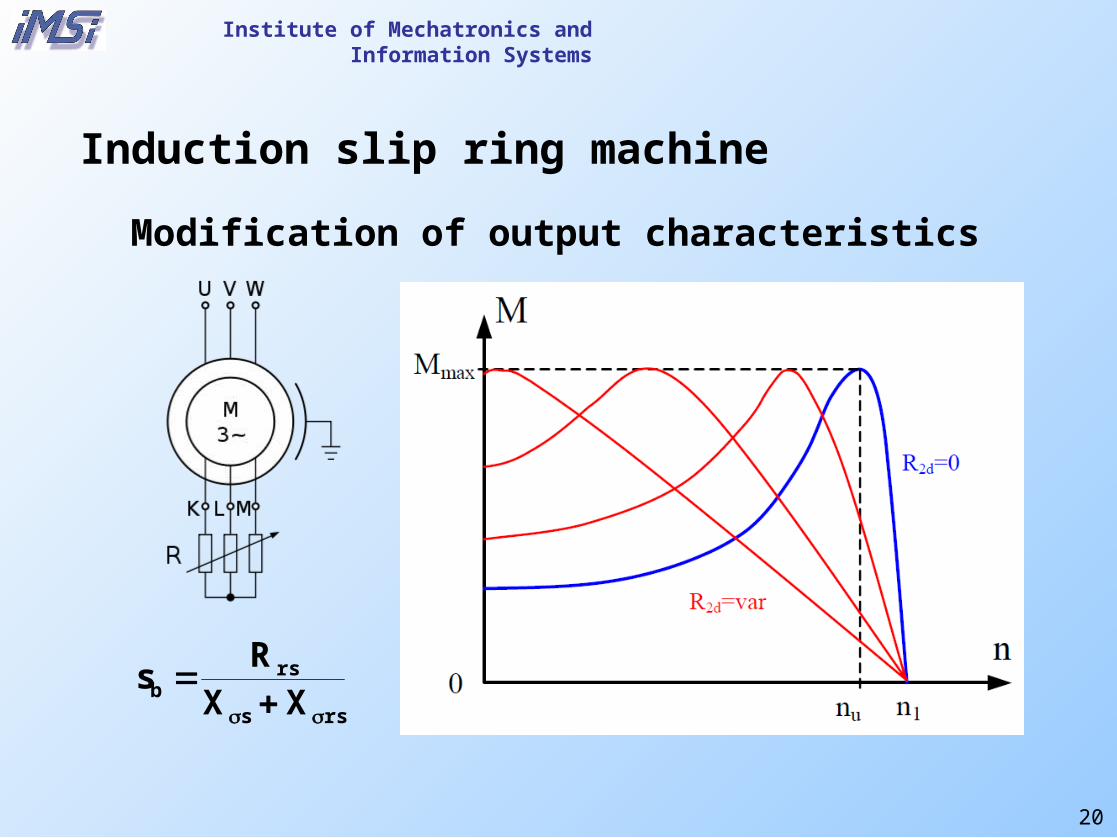
Induction slip ring machine
Modification of output characteristics
rss
rsb XX
Rs
21
Institute of Mechatronics and Information Systems
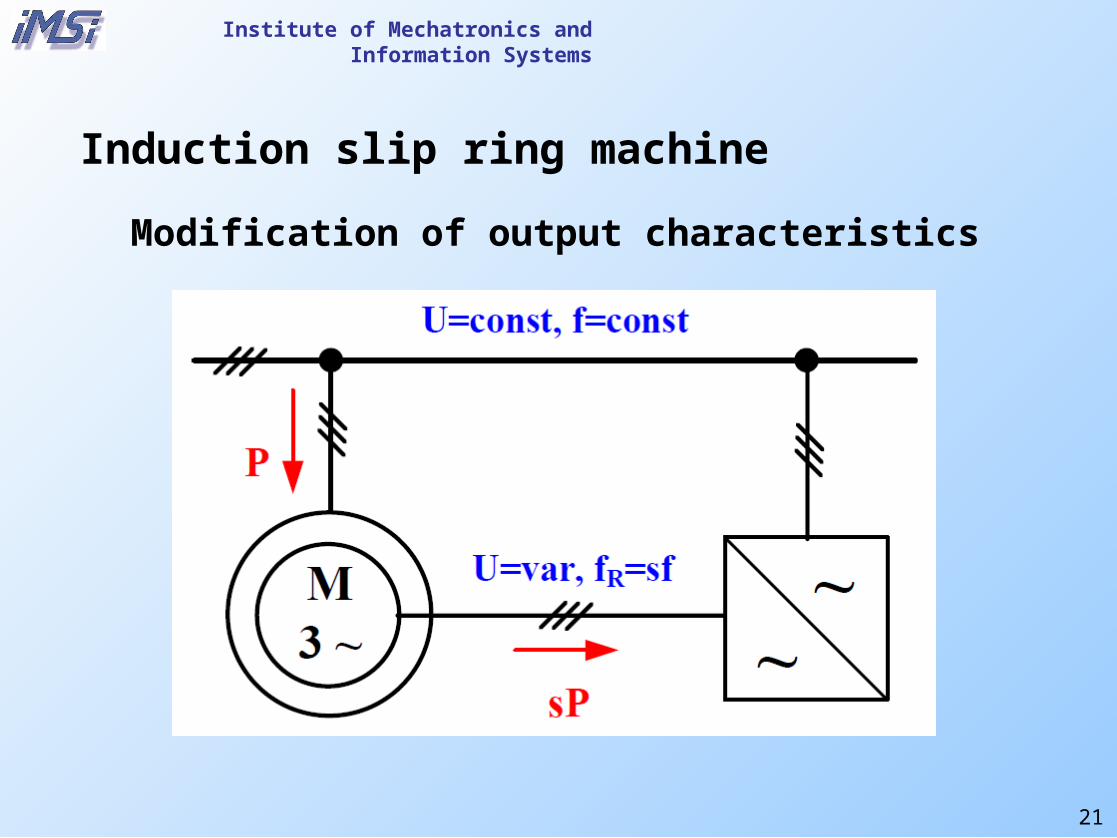
Induction slip ring machine
Modification of output characteristics
22
Institute of Mechatronics and Information Systems
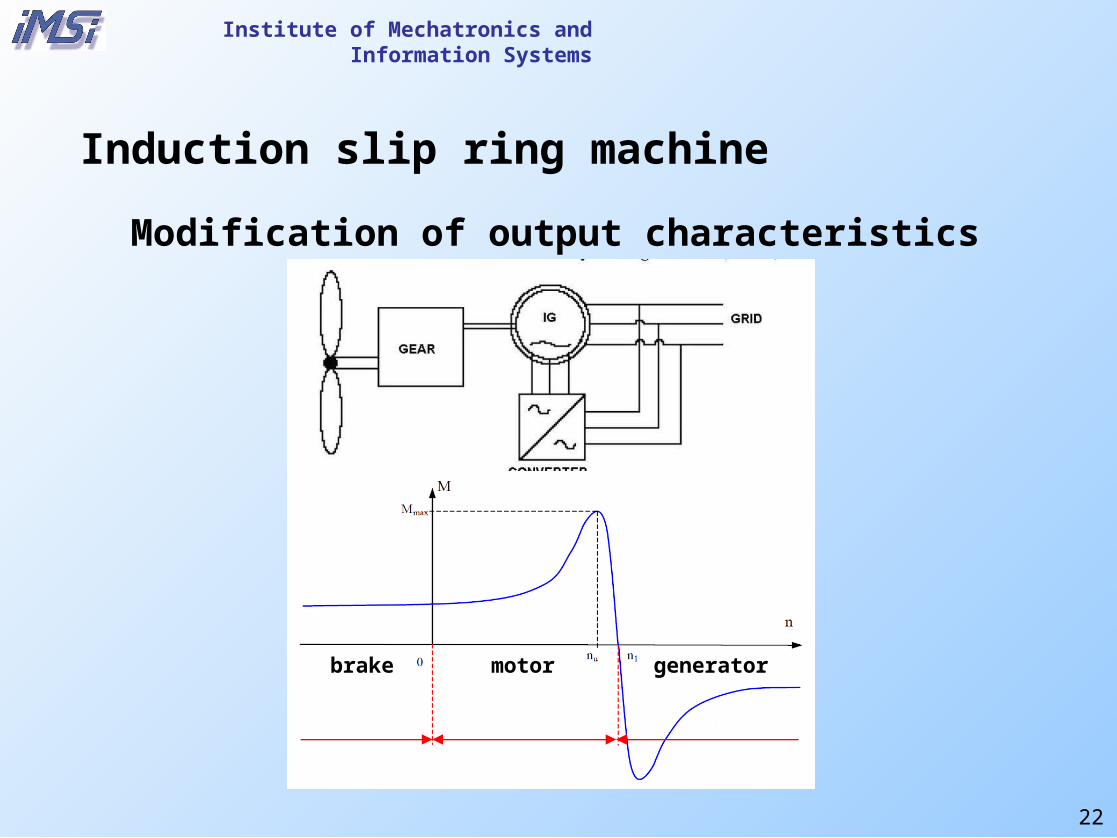
Induction slip ring machine
Modification of output characteristics
brake motor generator
23
Institute of Mechatronics and Information Systems
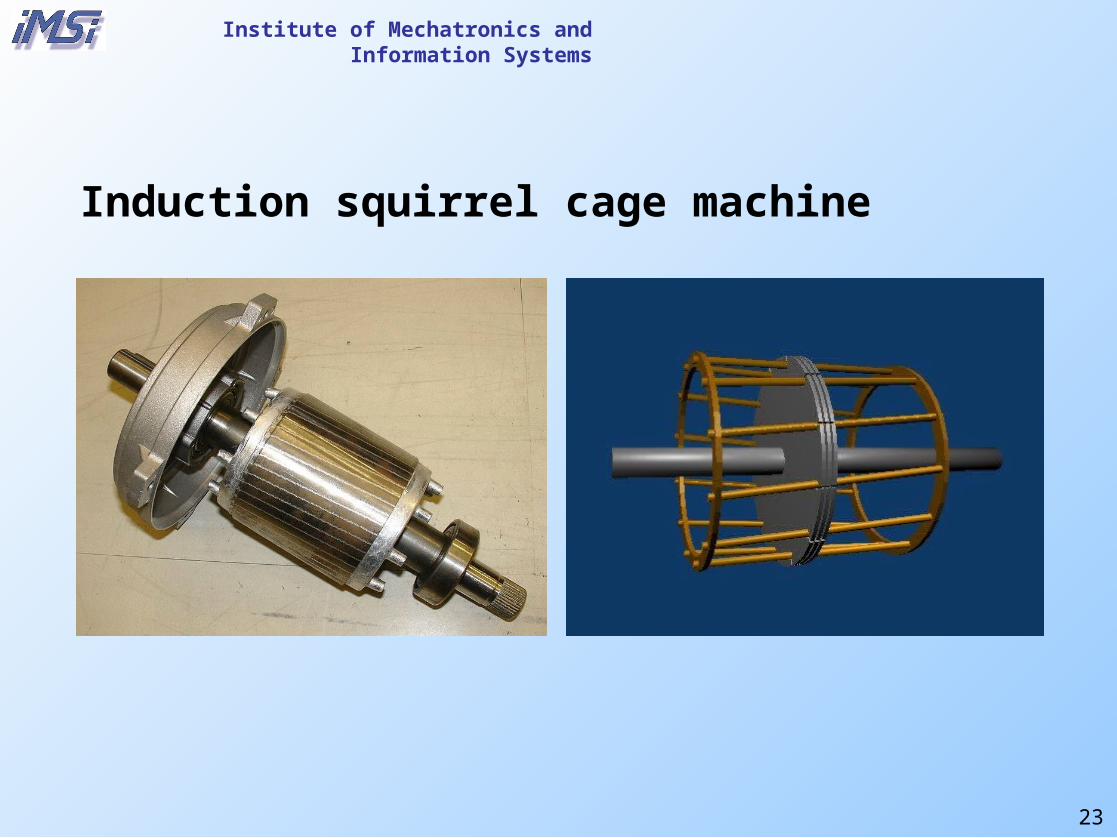
Induction squirrel cage machine
24
Institute of Mechatronics and Information Systems
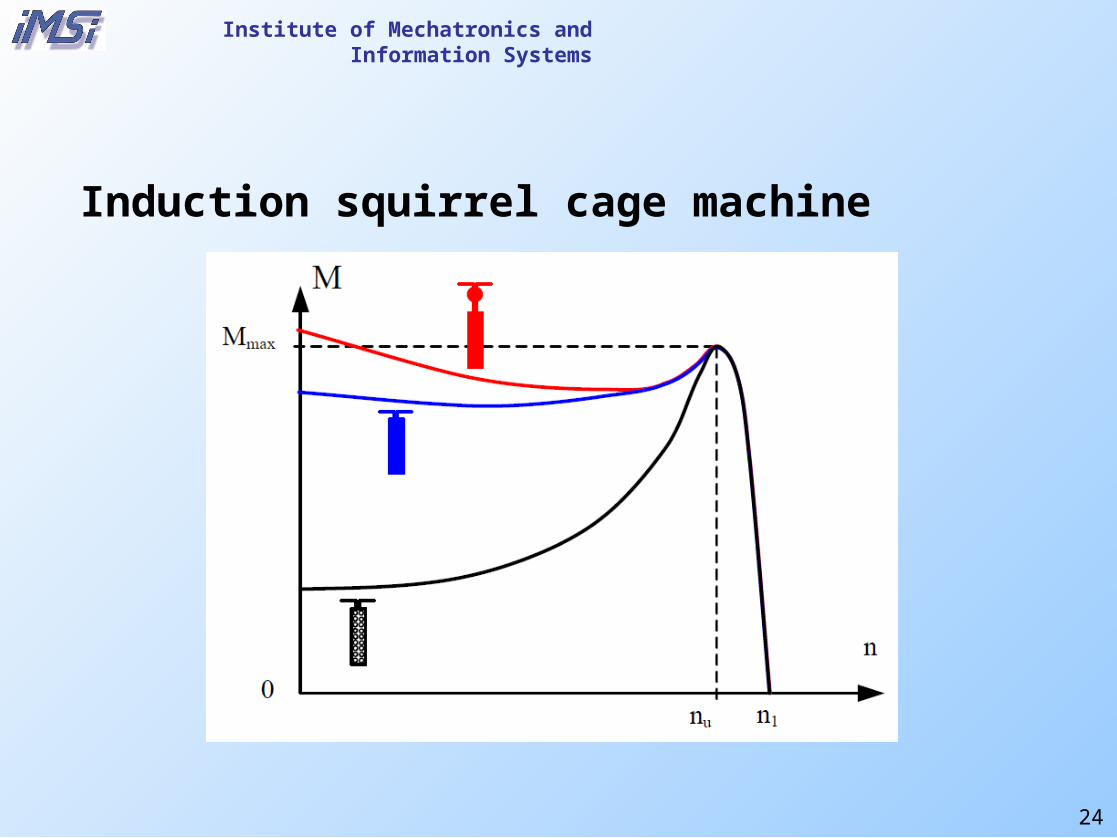
Induction squirrel cage machine
25
Institute of Mechatronics and Information Systems
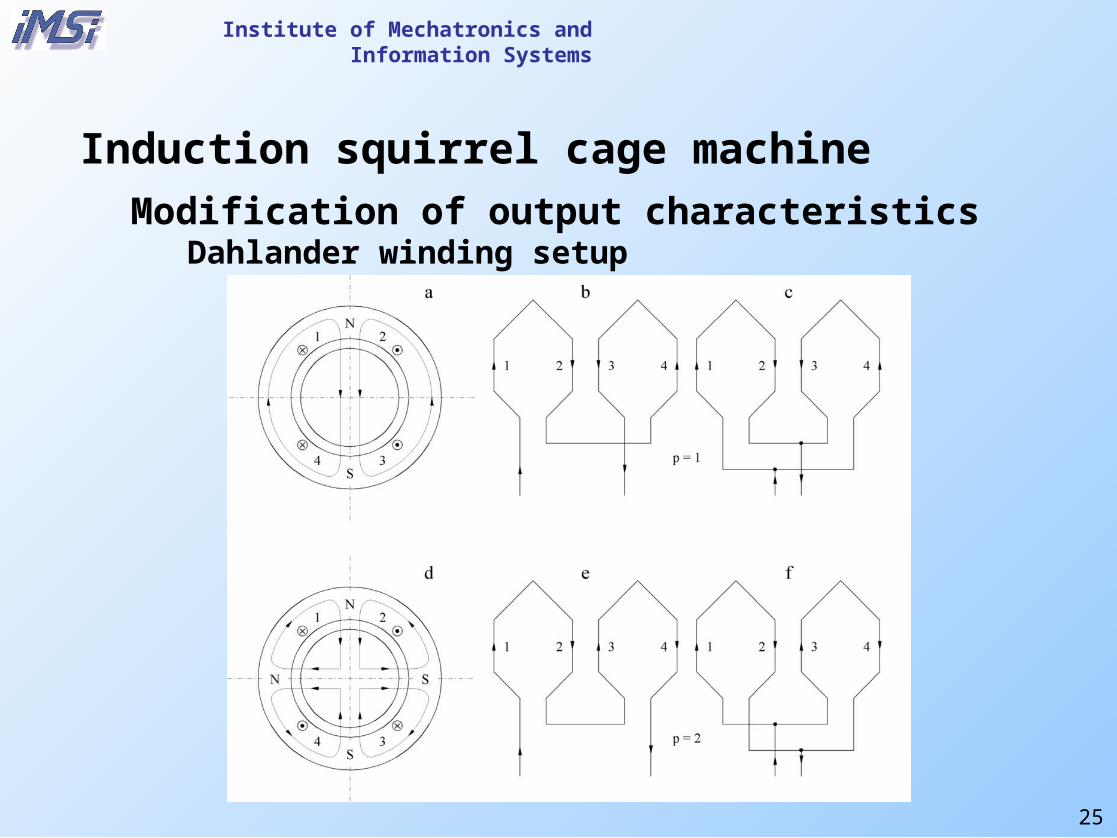
Induction squirrel cage machine
Modification of output characteristicsDahlander winding setup
26
Institute of Mechatronics and Information Systems
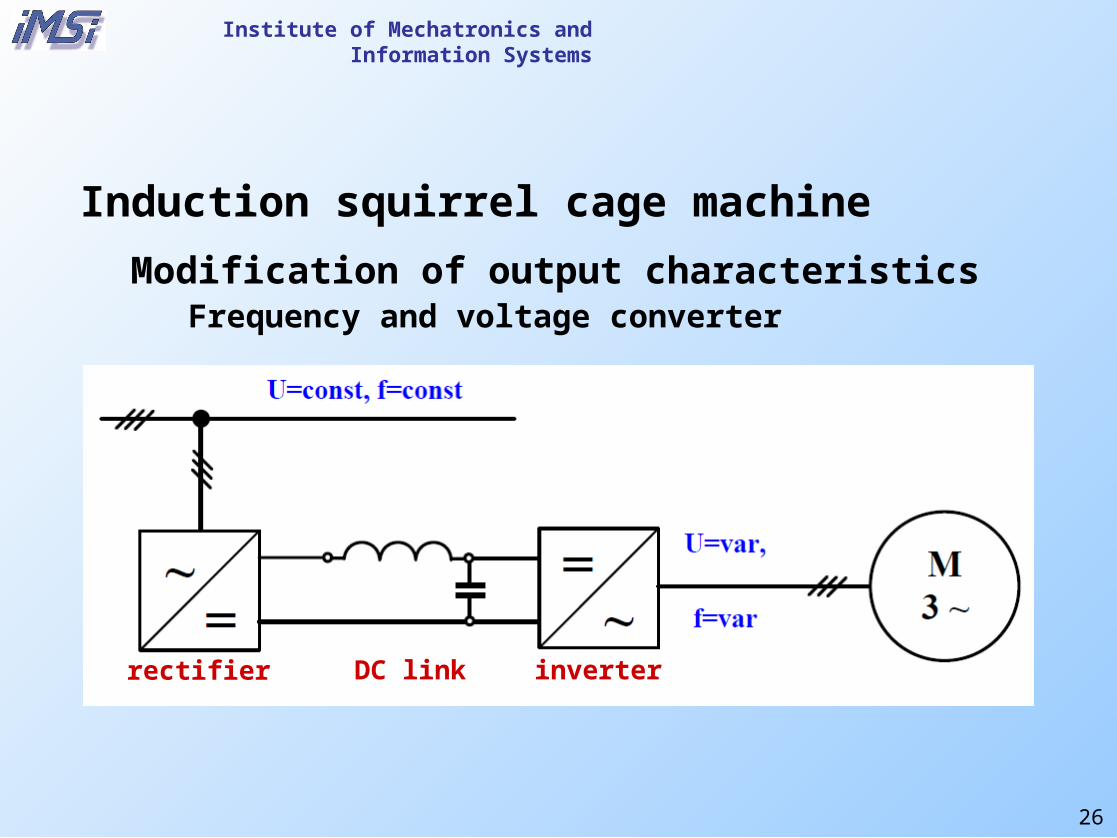
Induction squirrel cage machine
Modification of output characteristics Frequency and voltage converter
rectifier inverterDC link
27
Institute of Mechatronics and Information Systems
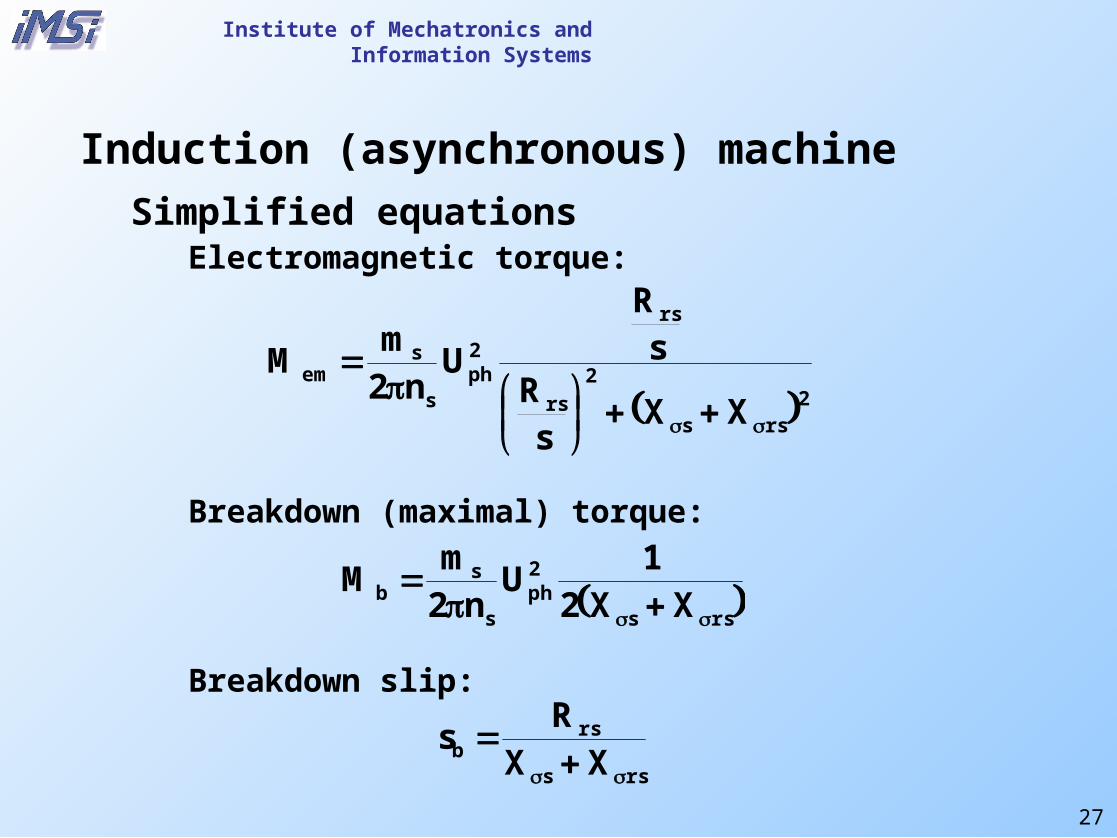
Induction (asynchronous) machine
Simplified equations Electromagnetic torque:
Breakdown (maximal) torque:
Breakdown slip:
2rss
2
rs
rs
2ph
s
sem
XXs
Rs
R
Un2
mM
rss
2ph
s
sb XX2
1U
n2m
M
rss
rsb XX
Rs
28
Institute of Mechatronics and Information Systems
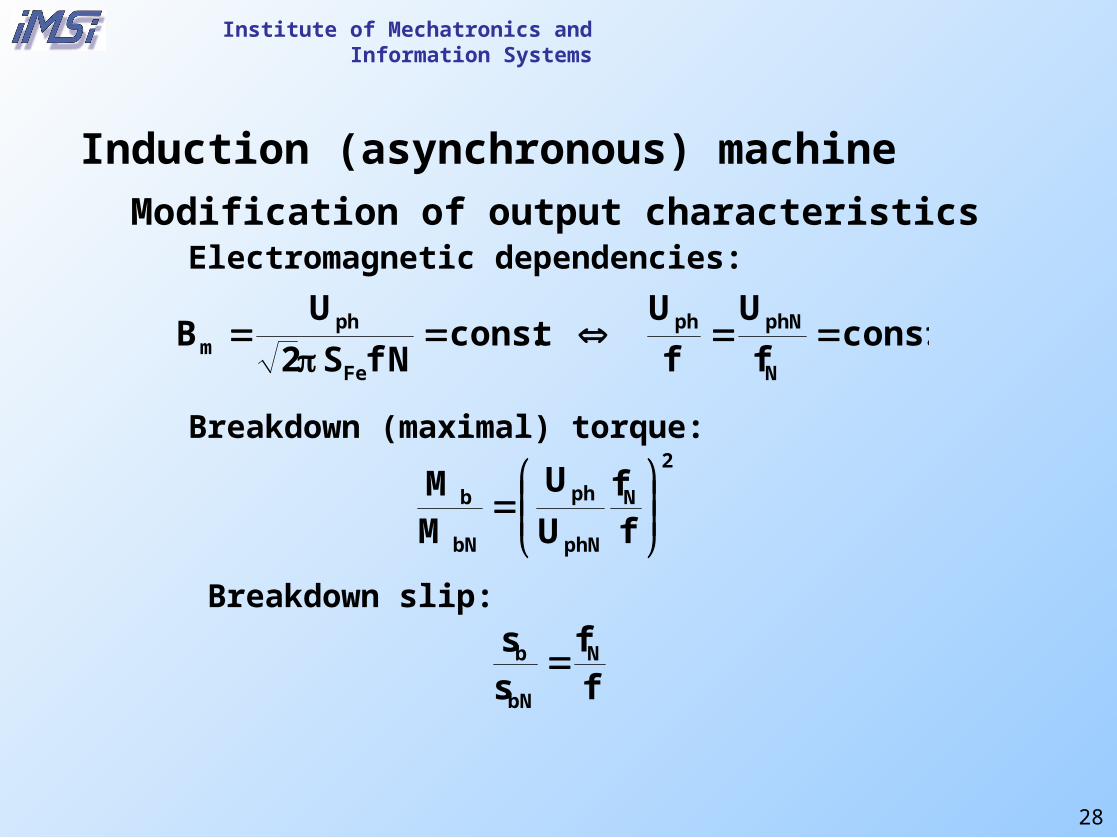
Induction (asynchronous) machine
Modification of output characteristics Electromagnetic dependencies:
Breakdown (maximal) torque:
Breakdown slip:
.const f
U
f
U .const
N fS 2
UB
N
phNph
Fe
phm
2
N
phN
ph
bN
b
ff
U
U
MM
ff
ss N
bN
b
29
Institute of Mechatronics and Information Systems
Induction (asynchronous) machineModification of output characteristics Varying frequency and voltage – constant Bm
30
Institute of Mechatronics and Information Systems
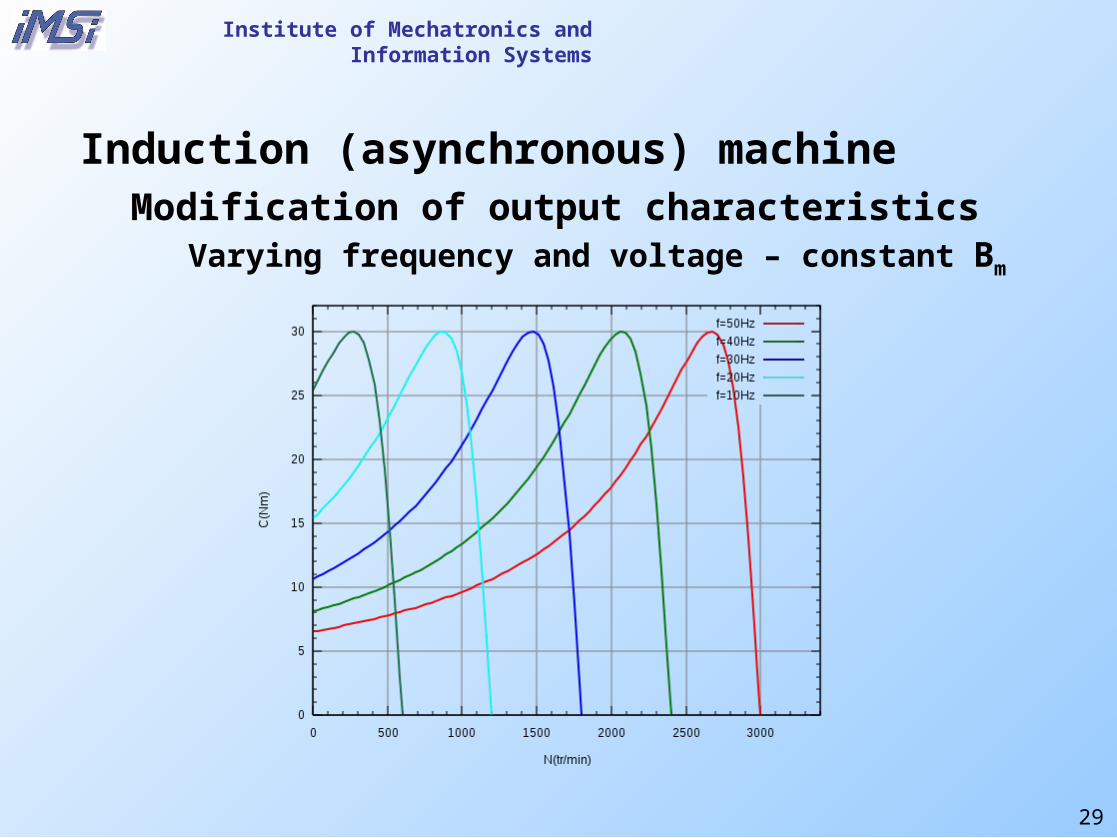
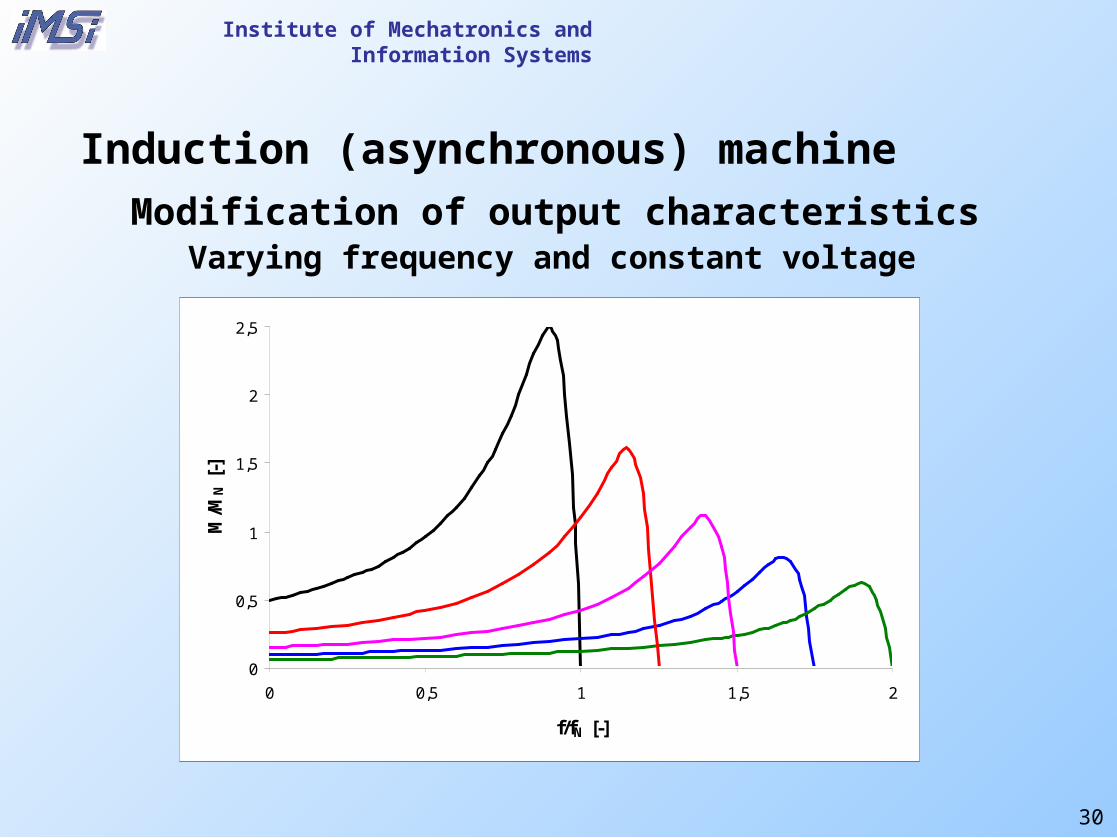
Induction (asynchronous) machine
Modification of output characteristics Varying frequency and constant voltage
0
0,5
1
1,5
2
2,5
0 0,5 1 1,5 2
f/fN [-]
M/M
N [
-]
31
Institute of Mechatronics and Information Systems
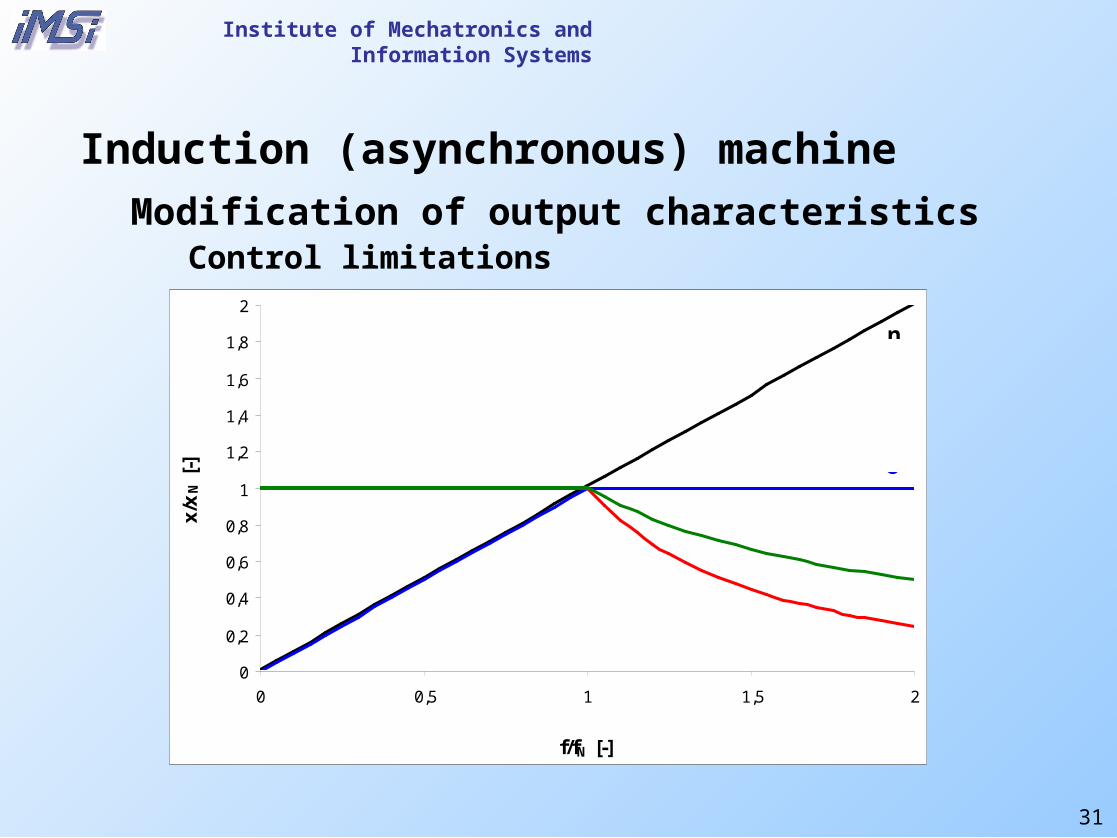
Induction (asynchronous) machine
Modification of output characteristics Control limitations
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0 0,5 1 1,5 2
f/fN [-]
x/x
N [
-]
n
U
M
Mb
32
Institute of Mechatronics and Information Systems
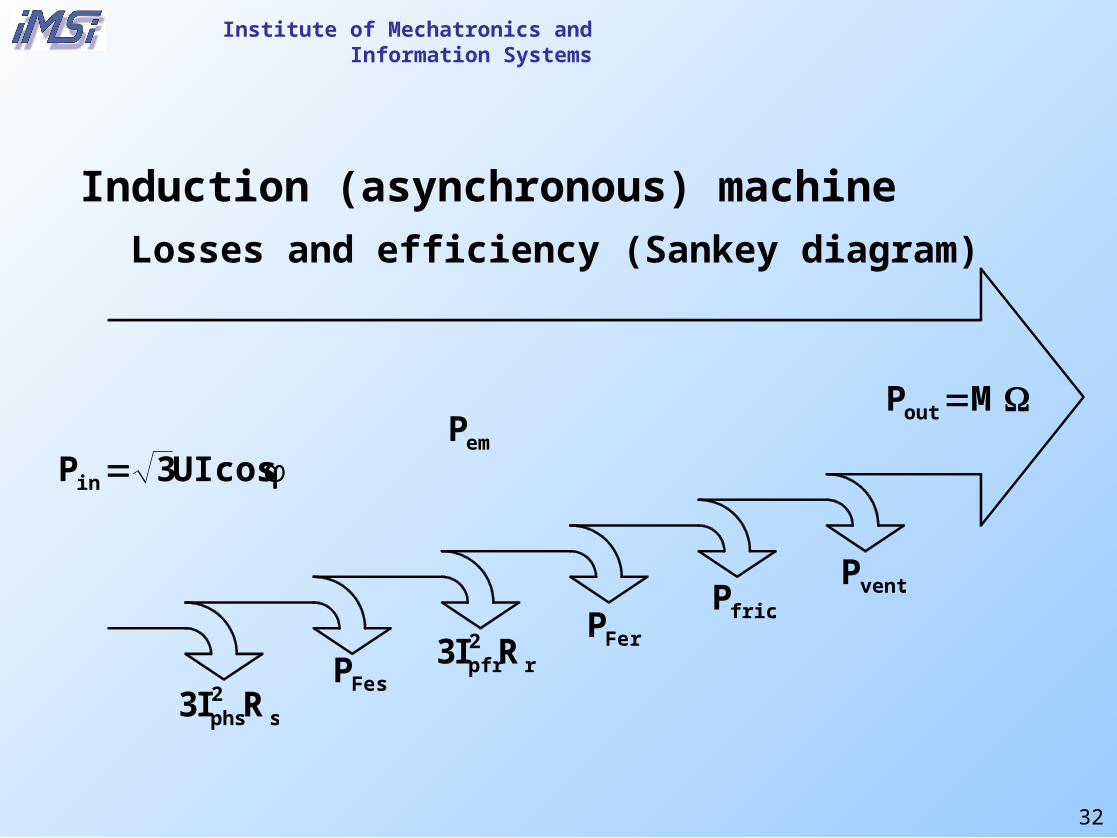
Induction (asynchronous) machine
Losses and efficiency (Sankey diagram)
s FeP
cosUI3Pin
emPMPout
s2phsRI3
r2pfrRI3 r FeP .frictP .ventP
33
Institute of Mechatronics and Information Systems
Thank You for Your attention





























