Embed Size (px)
Citation preview

1. crowdsourcing 2. unsupervised learning

Localization by Crowdsourcing
1. Rai A, Chintalapudi K K, Padmanabhan V N, et al. Zee: zero-effort crowdsourcing for
indoor localization, Mobicom 2012: 293-304.
2. Zheng Yang, Chenshu Wu, and Yunhao Liu, "Locating in Fingerprint Space: Wireless
Indoor Localization with Little Human Intervention", (PDF), ACM MobiCom 2012,
Istanbul, Turkey, August 22-26, 2012.
3. Chenshu Wu, Zheng Yang, Yunhao Liu, "Smartphones Based Crowdsourcing for
Indoor Localization", (PDF), IEEE Transactions on Mobile Computing (TMC), Vol. 14,
Issue 2,February, 2015, Pages 444-457.
4. Xinglin Zhang, Zheng Yang, Chenshu Wu, Wei Sun, Yunhao Liu, Kai Liu, "Robust
Trajectory Estimation for Crowdsourcing-Based Mobile Applications", IEEE
Transactions on Parallel and Distributed Systems (TPDS), Vol. 25, No. 7, July 2014,
Pages 1876-1885.
5. Ruipeng Gao, Mingmin Zhao, Tao Ye, Fan Ye, Yizhou Wang, Kaigui Bian, Tao Wang,
and Xiaoming Li. 2014. Jigsaw: indoor floor plan reconstruction via mobile
crowdsensing. (MobiCom '14). ACM, New York, NY, USA, 249-260.

1. Wang H, Sen S, Elgohary A, et al. No need to war-drive: unsupervised indoor
localization. MobiSys, 2012: 197-210.
2. Moustafa Alzantot and Moustafa Youssef. 2012. CrowdInside: automatic
construction of indoor floorplans. (SIGSPATIAL '12). ACM, New York, NY, USA,
99-108.
3. Yifei Jiang, Xin Pan, Kun Li, Qin Lv, Robert P. Dick, Michael Hannigan, and Li Shang.
2012. ARIEL: automatic wi-fi based room fingerprinting for indoor localization.
(UbiComp '12). ACM, New York, NY, USA, 441-450.
4. Bao X, Liu B, Tang B, et al. PinPlace: associate semantic meanings with indoor
locations without active fingerprinting, Ubicomp. 2015: 921-925.
5. Tachikawa M, Maekawa T, Matsushita Y. Predicting location semantics combining
active and passive sensing with environment-independent classifier,
ubicomp2016. ACM, 2016: 220-231.
Localization by Unsupervised Learning

Timeline of localization by crowdsourcing
and unsupervised learning
LiFS, Mobicom
WILL, Infocom
ZEE, Mobicom
2014
Robust CS,
TMC
Crowdsourcing
TMC
Jigsaw
Mobicom
Crowdsourcing
2012
Crowdinside,
sigspatial
ARIEL, uibcomp
No need for war drive,
Mobisys
2015 2016
Pinplace,
ubicomp2015
Predicting
location
semantics,
ubicomp2016
Unsupervised
learning
2014 2012 2015 2016
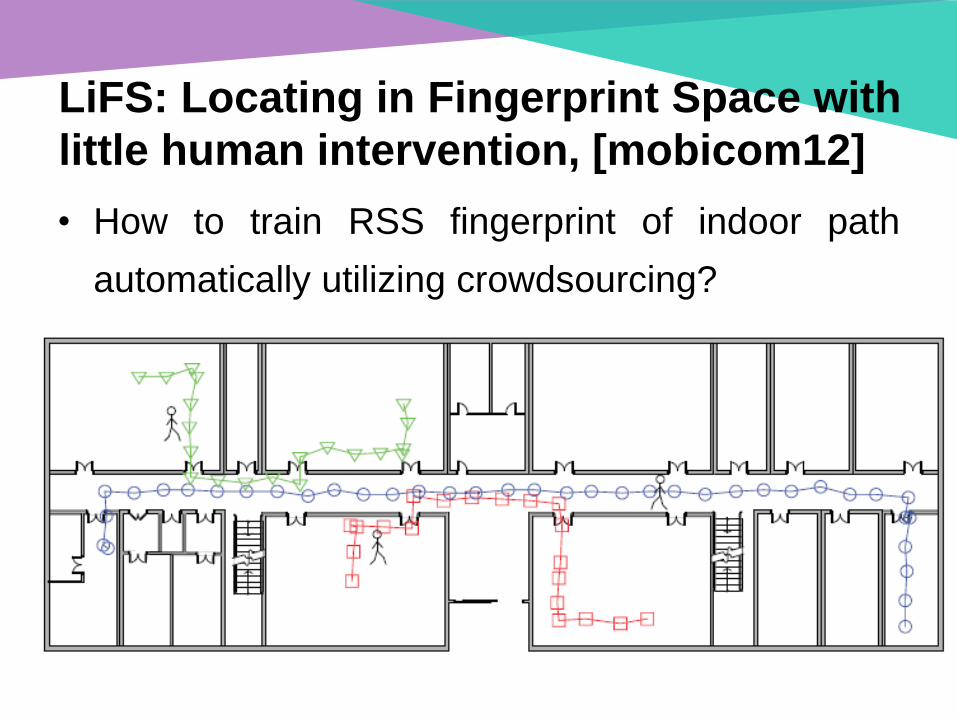
LiFS: Locating in Fingerprint Space with
little human intervention, [mobicom12]
• How to train RSS fingerprint of indoor path
automatically utilizing crowdsourcing?

LiFS

Stress-free Floor Plan
𝑑11 ⋯ 𝑑1𝑛⋮ ⋱ ⋮
𝑑𝑛1 ⋯ 𝑑𝑛𝑛
MDS
Walking distance
The MDS give every sample a new coordinate,
with which the Euclidian distance reflects the
walking distance in a real floor plan. 3D stress-free floor plan

Multidimensional Scaling (MDS) Torgerson (1952), Borg & Groenen, 1997
Classical MDS: Given a distance matrix among N
points, calculate the coordinates of these points in d
dimensional space.
0 20 20
20 0 20
20 20 0
D
1
2
3
x
x
x
?
1
22
1 2
1, ,
( , )D N ij i j
i j N
Stress x x x d x x
Minimize Stress:

Multidimensional Scaling (MDS)
• The distance matrix D2=[d2ij] can be converted to
a semi-definite matrix B by double centering:
where J called centering matrix
21'
2B JD J XX
11 *1 'n nJ I
n
Double
centering

Multidimensional Scaling (MDS)
• B is semi-positive definite, so by eigen-
decompositon:
1
1 112 2
'B XX V V
V V
1
2X V
Having d positive
eigenvalues

MDS Algorithm
1. Set up
2. Apply double centering ,
3. Determine the m largest eigenvalues
and corresponding eigenvector
4. Now,
(2) 2[ ]ijD d
(2)1
2B JD J
111J I
n
1 2, ,..., m
1 2, ,..., me e e
1/2
m mX E
Example of MDS

Fingerprint Collection
𝑓 = 𝑠1, 𝑠2, …… 𝑠𝑛 ,where 𝑠𝑖 is the RSS
of the ith AP.
Let 𝑑𝑖𝑗 denotes the distance between
the positions of 𝑓𝑖 and 𝑓𝑗, it is measured
by the number of footsteps during the
movement.
To avoid accumulation of measurement
errors, we adopt the individual step counts
as the metric of walking distance.

Fingerprint preprocessing
• Clustering
• Cluster fingerprints from the same or close locations.
• Parameter is determined by fingerprint samples collected at a
given location (when phones are not moving).

Distance matrix
• Shortest-path selection
• More than one path passing through two fingerprints
• Simply select the shortest one as the distance between them.
• Floyd-Warshall algorithm to compute all-pair shortest
paths of fingerprints.

Fingerprint space construction
• According to distance matrix, transform all points in to a
d-dimension Euclidean space, i.e., the fingerprint space,
using MDS.
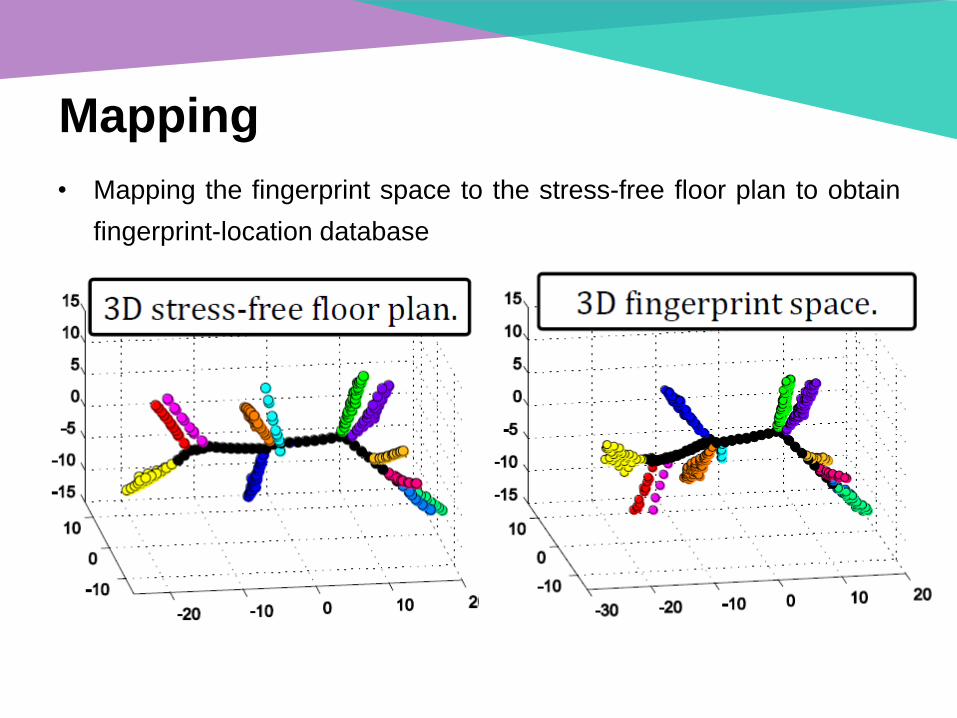
Mapping
• Mapping the fingerprint space to the stress-free floor plan to obtain
fingerprint-location database

Mapping
• The mapping seems easy for humans, for computers, however,
it is non-trivial.
• Their solution: Mapping corridors first, then rooms.
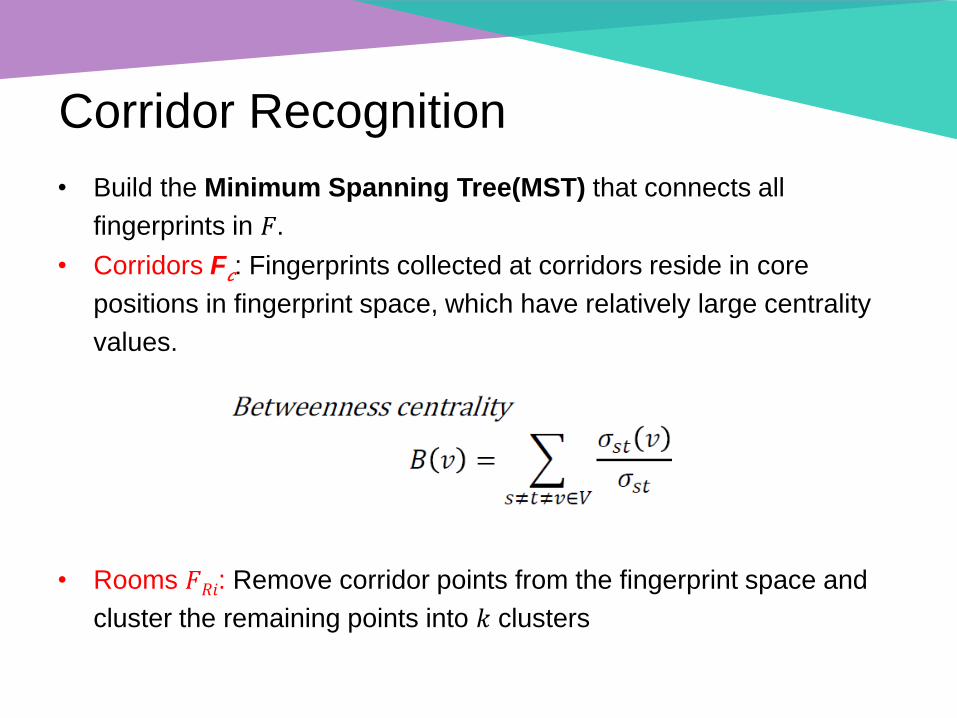
Corridor Recognition
• Build the Minimum Spanning Tree(MST) that connects all
fingerprints in 𝐹.
• Corridors F𝑐: Fingerprints collected at corridors reside in core
positions in fingerprint space, which have relatively large centrality
values.
• Rooms 𝐹𝑅𝑖: Remove corridor points from the fingerprint space and
cluster the remaining points into 𝑘 clusters

Corridor Recognition
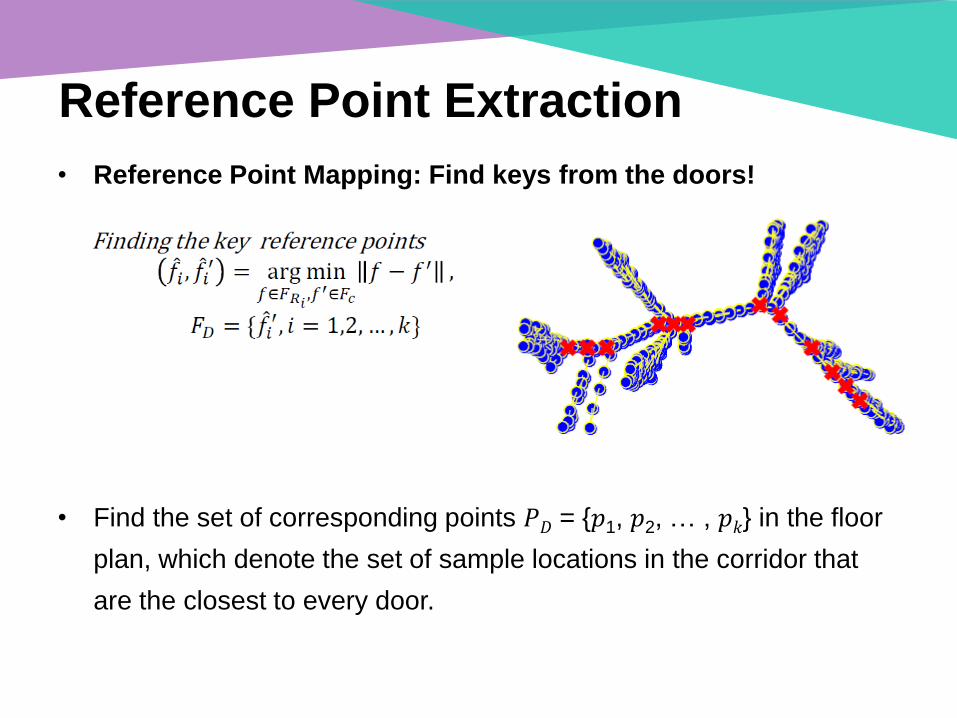
Reference Point Extraction
• Reference Point Mapping: Find keys from the doors!
• Find the set of corresponding points 𝑃𝐷 = {𝑝1, 𝑝2, … , 𝑝𝑘} in the floor
plan, which denote the set of sample locations in the corridor that
are the closest to every door.

Reference Point Mapping
• Mapping 𝐹𝐷 to 𝑃𝐷
1 2 1 1, , , ,k i i il l l l l p p
' ' ' '
1 2 1 1' , , , ,k i i il l l l l f f
'' '' '' ''
1 2 1 1'' , , , ,k i k i k il l l l l f f
Vector similarity:

Space Transformation
i iy Rx T
ix A coordinate in fingerprint space
A coordinate in floor plan space iy
𝑅 𝑇 and are calculated by LSQ

Room-level Transformation • Using doors and room corners as reference points, the fingerprints
and sample locations are linked by the transformation matrix.
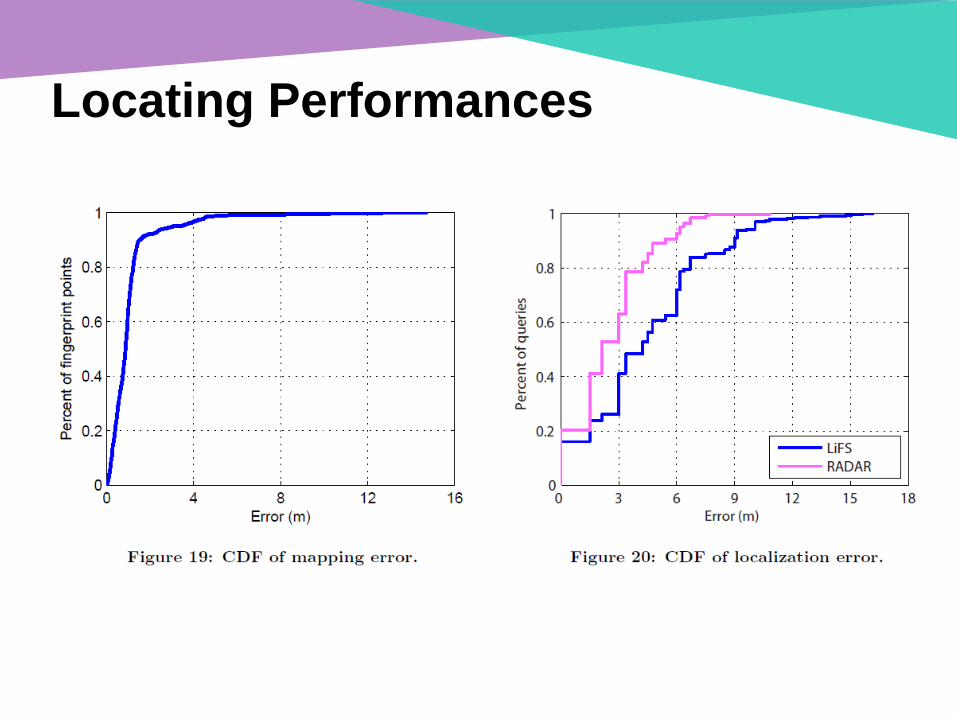
Locating Performances


No Need to War-Drive:
Unsupervised Indoor Localization (Unloc)
1. Wang H, Sen S, Elgohary A, et al. No need to war-drive: unsupervised indoor localization. MobiSys,
2012: 197-210.
Track human walking trajectory (called dead reckon) – Using accelerometer and electronic compass

Cannot work in GPS-denied area
Successfully used for outdoor localization
– Use GPS reset points (landmarks) and dead-reckon inbetween

There are landmarks indoor
We can find landmarks if we see through the “eye of sensors”
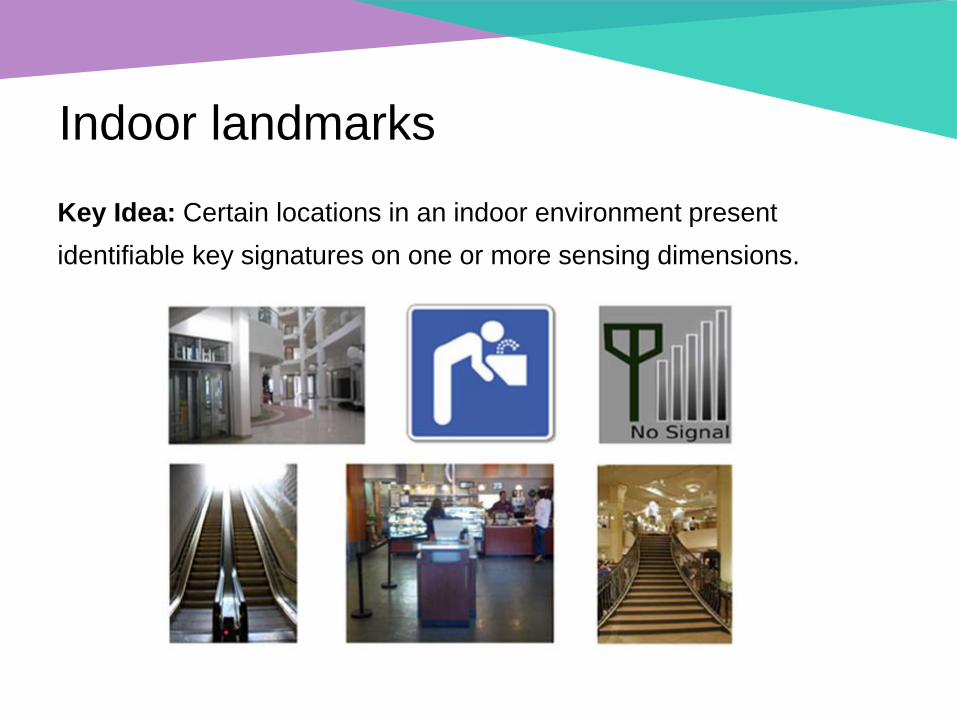
Indoor landmarks
Key Idea: Certain locations in an indoor environment present
identifiable key signatures on one or more sensing dimensions.

Seed landmarks (SLM)
• UnLoc looks into the floorplan of the building and identifies some
“seed landmarks”.
• Examples:
• Stairs
• Elevators (start/stop)
• Escalator
• Building entrances (indoors/outdoors)
• The location of the SLMs are known.

Organic Landmarks (OLMs)
• Any indoor environment will offer some ambient
signatures across one or more seeing directions
• Magnetic Domain – metals may produce unique fluctuations on
magnetometer.
• WiFi Based – overheard WiFi base-stations.
• They cannot be known a priori, and will vary across
different buildings. They have to be learnt dynamically.

Finding OLMs by clustering sensor data

Framework of Unloc

Ideal case

Simultaneously locating and marking

Locating landmarks

Decision tree for detection SLMs


Online video:
https://www.youtube.com/watch?v=VhkXC6TnWzk

Summary
Fingerprint-based Localization
Localization by Acoustic Features
Localization by Lighting Features
Localization by Channel State Indicator (CSI)
Localization by Environment Features
Crowdsourcing and unsupervised learning
Crowdsourcing
Unsupervised learning





























