Embed Size (px)
Citation preview
1
Class #20 of 30
Celestial engineering Clarification on scattering
angles
Rotating reference frames Vector angular velocity Newton’s laws on rotating
frame Two “fictitious forces”
:02
2
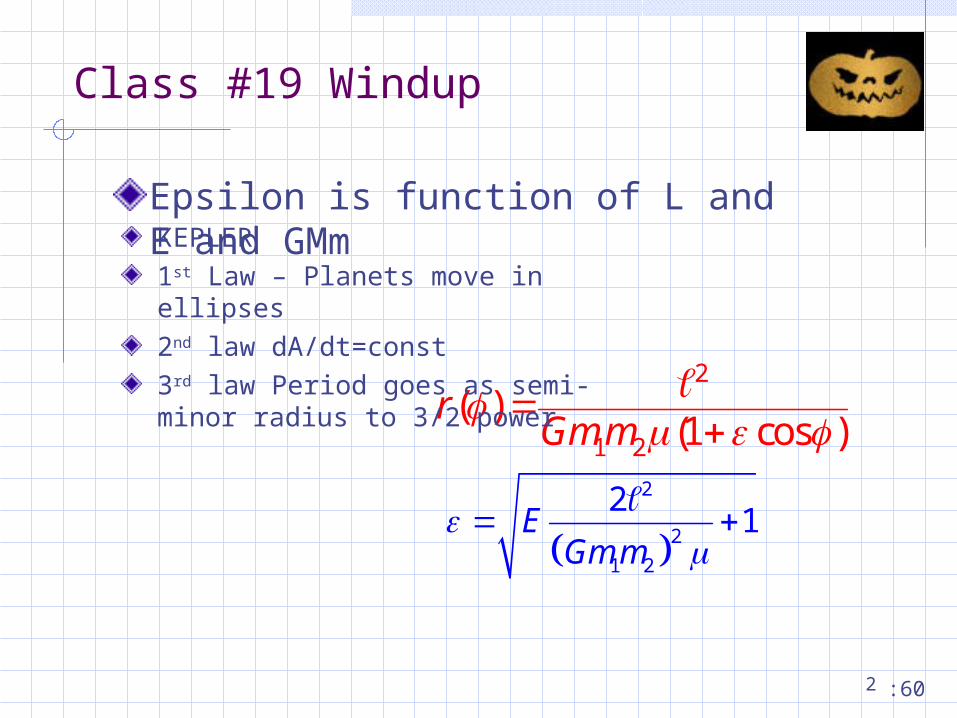
Class #19 Windup
Epsilon is function of L and E and GMm
:60
2
2
1 2
2
1 2
21
( )(1 cos )
EGmm
rGmm
KEPLER1st Law – Planets move in ellipses 2nd law dA/dt=const3rd law Period goes as semi-minor radius to 3/2 power
3
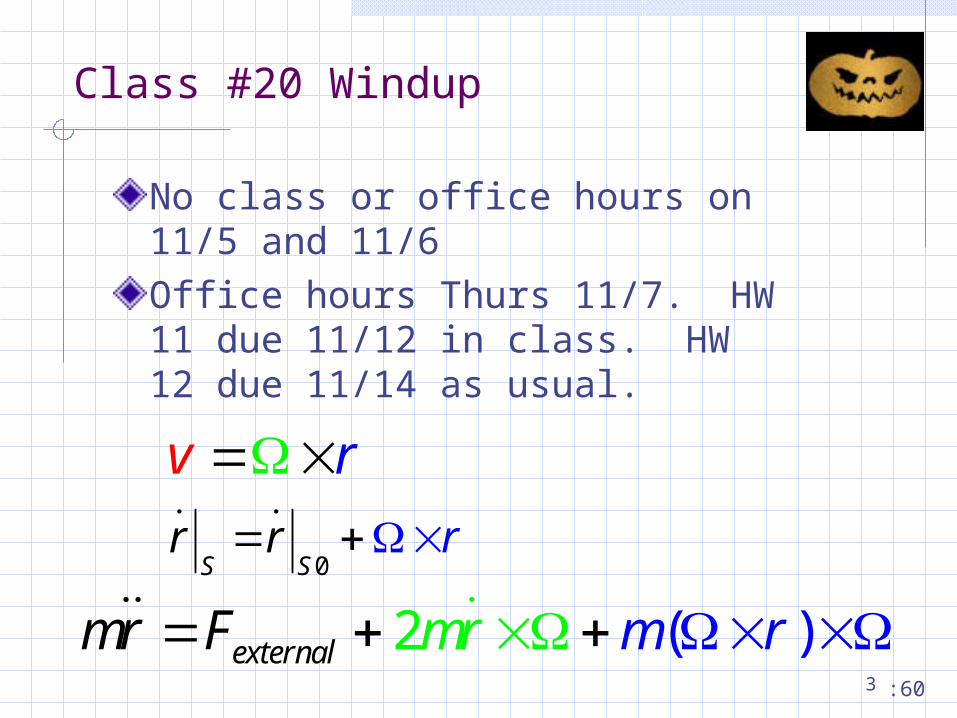
Class #20 Windup
No class or office hours on 11/5 and 11/6Office hours Thurs 11/7. HW 11 due 11/12 in class. HW 12 due 11/14 as usual.
:60
rv
2 ( )external mr m rmr F
0S Sr r r
4
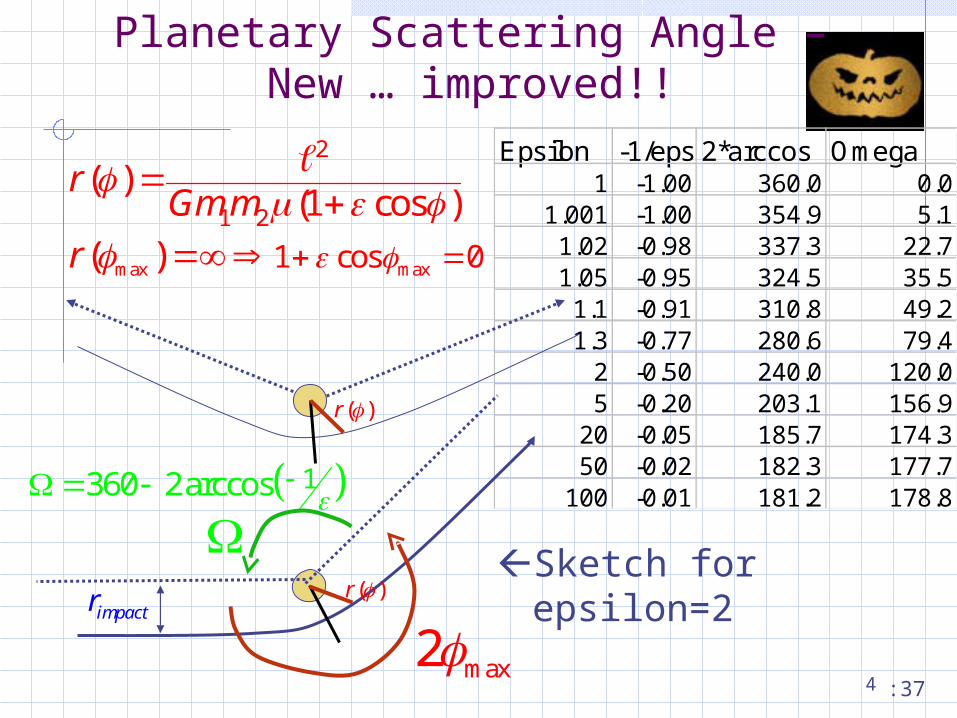
Planetary Scattering Angle – New … improved!!
:37
Epsilon -1/eps 2*arccos Omega1 -1.00 360.0 0.0
1.001 -1.00 354.9 5.11.02 -0.98 337.3 22.71.05 -0.95 324.5 35.51.1 -0.91 310.8 49.21.3 -0.77 280.6 79.42 -0.50 240.0 120.05 -0.20 203.1 156.920 -0.05 185.7 174.350 -0.02 182.3 177.7100 -0.01 181.2 178.8
max max
2
1 2
1 cos 0
( )(1 cos )
( )
rGmm
r
( )r
( )r
max2
1360 2arccos
impactrSketch for epsilon=2
5
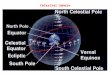
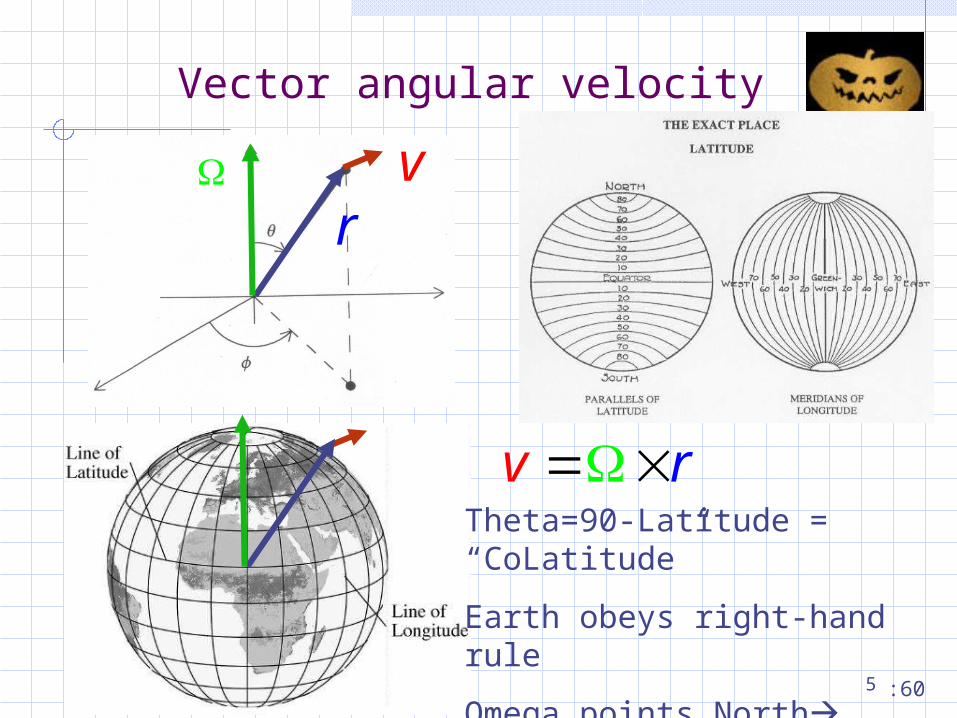
Vector angular velocity
:60
rv
v
r
Theta=90-Latitude = “CoLatitude”
Earth obeys right-hand rule
Omega points North Earth spins clockwise Sun rises in east
6
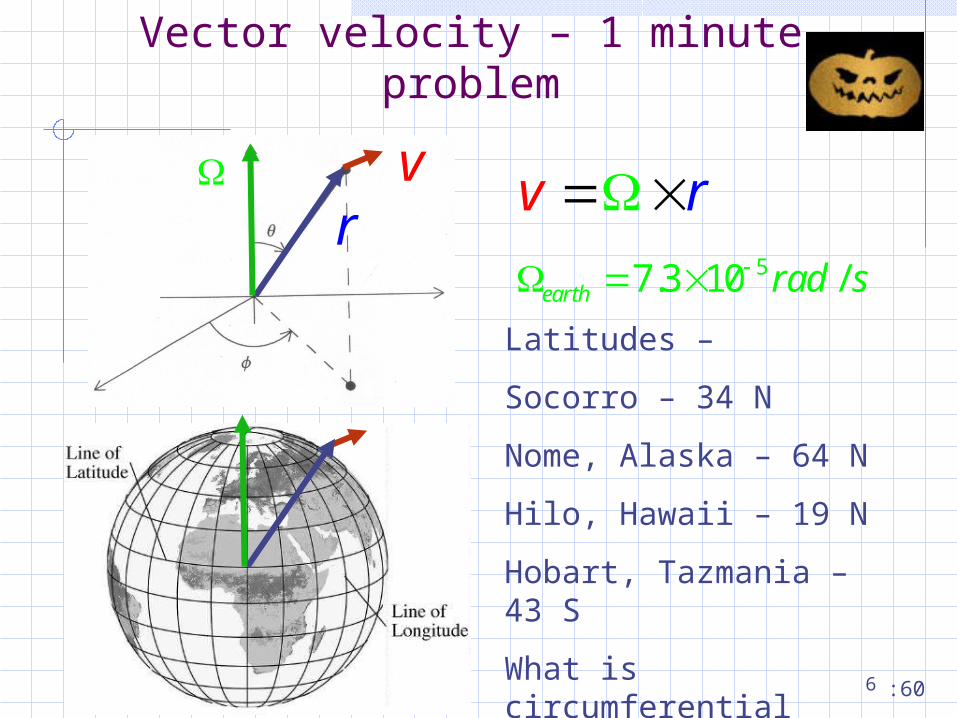
Vector velocity – 1 minute problem
:60
rv v
r
Latitudes –
Socorro – 34 N
Nome, Alaska – 64 N
Hilo, Hawaii – 19 N
Hobart, Tazmania – 43 S
What is circumferential velocity of each of these four cities?
57.3 10 /earth rad s
7
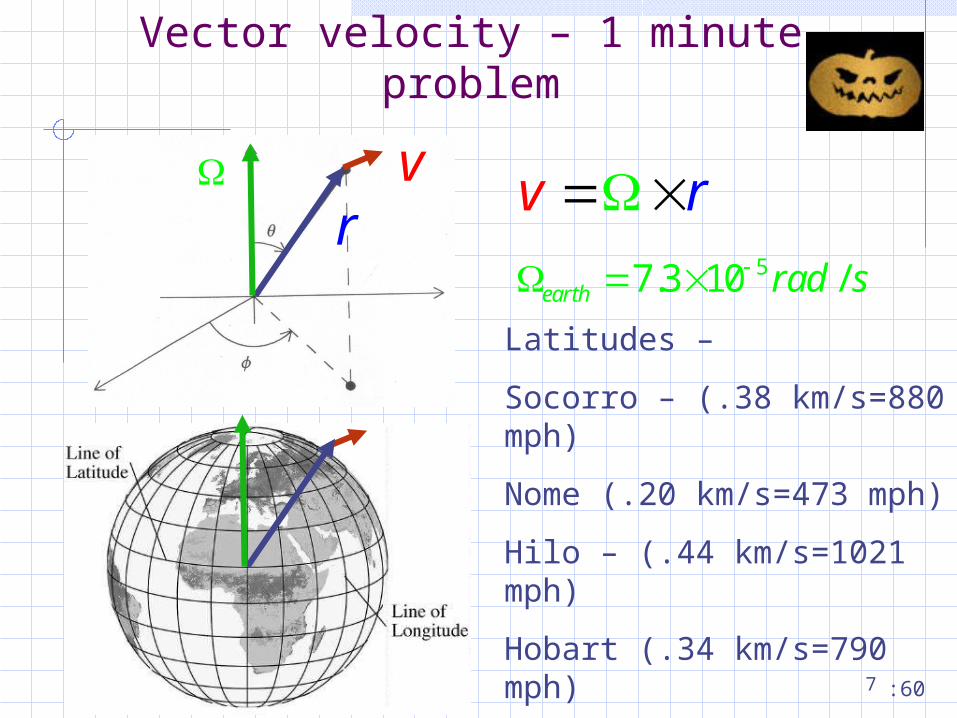
Vector velocity – 1 minute problem
:60
rv v
r
Latitudes –
Socorro – (.38 km/s=880 mph)
Nome (.20 km/s=473 mph)
Hilo – (.44 km/s=1021 mph)
Hobart (.34 km/s=790 mph)
57.3 10 /earth rad s
8
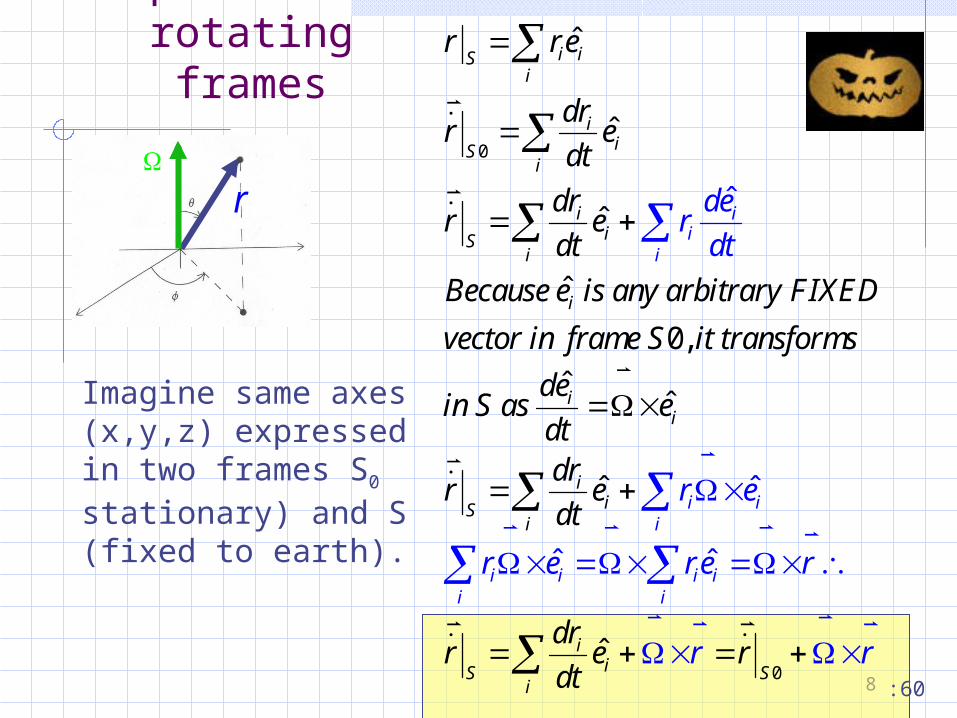
Vectors expressed in
rotating frames
:60
r
Imagine same axes (x,y,z) expressed in two frames S0 stationary) and S (fixed to earth).
0
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
0,
ˆˆ
ˆ
ˆ
ˆ
i iSi
iiS
i
iiS
ii
i
i ii
i i i ii
i
i
ii
ii
i
Si
iiS
i
r re
drr e
dt
drr e
dt
Because e is any arbitrary FIXED
vector in frame S it t
derdt
r e
r
ransforms
dein S as e
dtdr
r edt
drr e
dt
e re r
0S
rr r
9 :60
0
0
0
ˆ
ˆ
.
( )
( )
(2
) (
)
iiS
i
iiS
i
S S
S S
S S
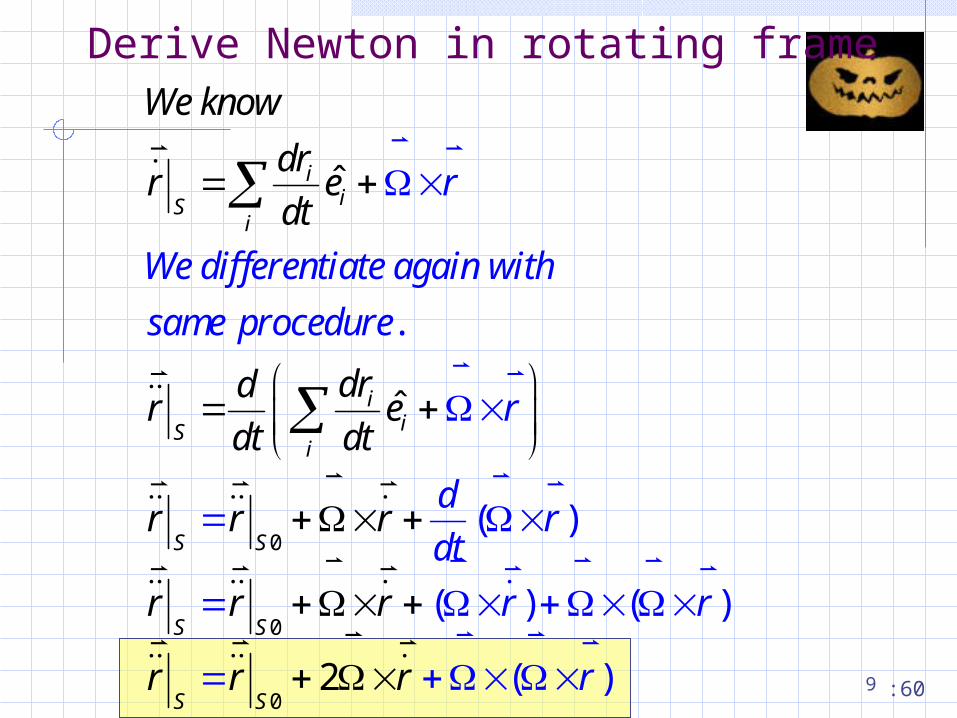
We know
drr e
dt
drdr e
dt dt
r r r
r r r
r
We differentiate again with
same procedure
r
r r
dr
dt
r
rr
r
Derive Newton in rotating frame
10
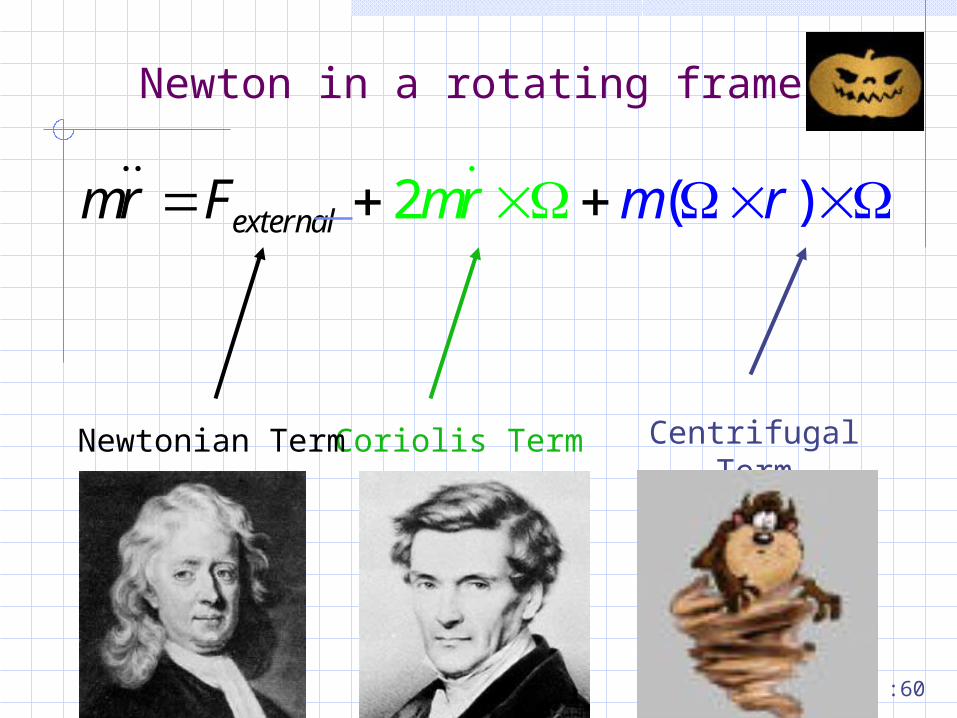
Newton in a rotating frame
:60
2 ( )external mr m rmr F
Coriolis Term Centrifugal TermNewtonian Term
11 :60
r
r
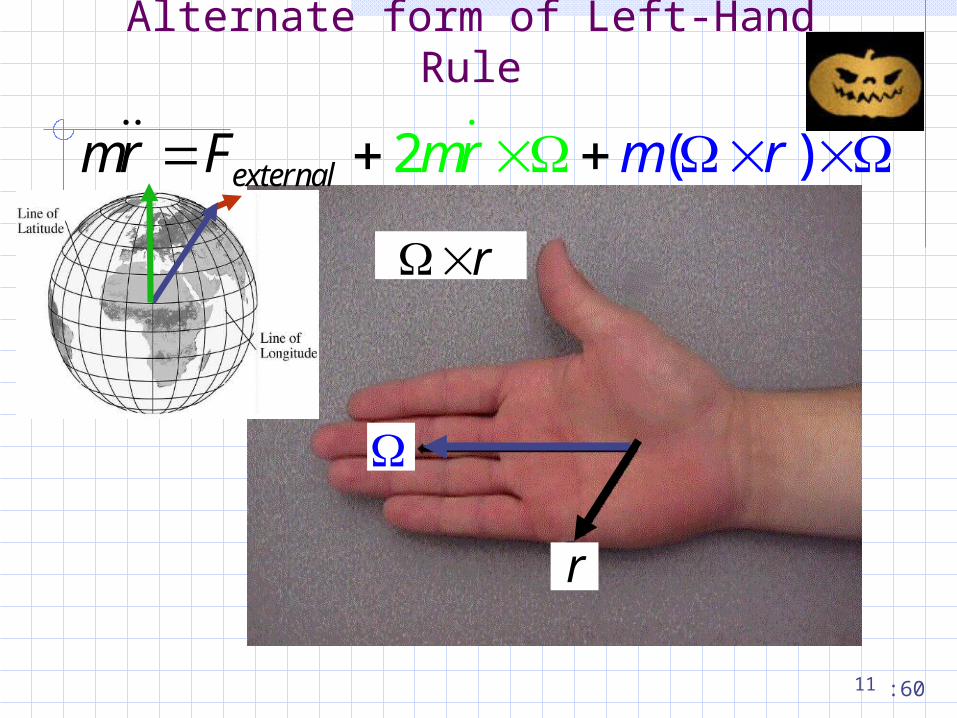
Alternate form of Left-Hand Rule
2 ( )external mr m rmr F
12
Class #20 Windup
No class or office hours on 11/5 and 11/6Office hours Thurs 11/7. HW 11 due 11/12 in class. HW 12 due 11/14 as usual.
:60
rv
2 ( )external mr m rmr F
0S Sr r r