Embed Size (px)
Citation preview
1
Autosub Autosub Mission Planning and Mission Planning and
OperationsOperations
Dr. Miles PebodyDr. Miles PebodyOcean Engineering DivisionOcean Engineering Division
Southampton Oceanography CentreSouthampton Oceanography Centre
[email protected]@soc.soton.ac.uk
2
OverviewOverview
EquipmentEquipment Pre-Mission PlanningPre-Mission Planning Mission Preparation and Mission Preparation and
InitiationInitiation Mission End and Post MissionMission End and Post Mission

3
EquipmentEquipment
4
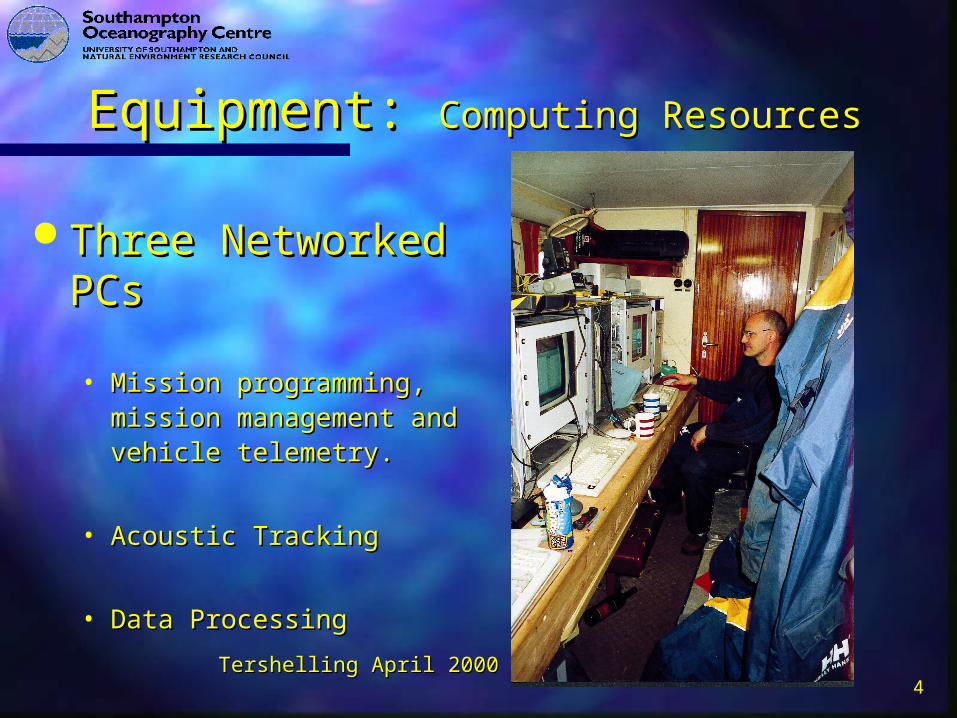
Equipment: Equipment: Computing ResourcesComputing Resources
Three Networked Three Networked PCsPCs
• Mission programming, Mission programming, mission management and mission management and vehicle telemetry.vehicle telemetry.
• Acoustic TrackingAcoustic Tracking
• Data ProcessingData Processing
Tershelling April 2000Tershelling April 2000
5
Equipment: Equipment: On Surface CommunicationsOn Surface Communications
Lonworks VHF Radio Modem (range Lonworks VHF Radio Modem (range 0.5Km)0.5Km)
Ethernet VHF Radio Modem (range 0.5Km)Ethernet VHF Radio Modem (range 0.5Km) Orbcomm Satellite CommunicationsOrbcomm Satellite Communications Argos Satellite TrackingArgos Satellite Tracking
6
Equipment: Equipment: Subsurface CommunicationsSubsurface Communications
23-33KHz Acoustic Tracking, 23-33KHz Acoustic Tracking,
Telemetry and CommandsTelemetry and Commands
10-14KKz Tracking 10-14KKz Tracking (telemetry in development) (telemetry in development)
7
Pre-Mission PlanningPre-Mission Planning
8
Pre-Mission PlanningPre-Mission Planning
Mission RequirementsMission Requirements Mission NavigationMission Navigation Control ModesControl Modes Autosub Safety IssuesAutosub Safety Issues The Mission End - The Mission End -
RecoveryRecovery
9
Mission RequirementsMission Requirements
Instruments/sensorsInstruments/sensors Data samplingData sampling Area of operationArea of operation Vehicle critical factorsVehicle critical factors
• Power availabilityPower availability• Depth ratingsDepth ratings
10
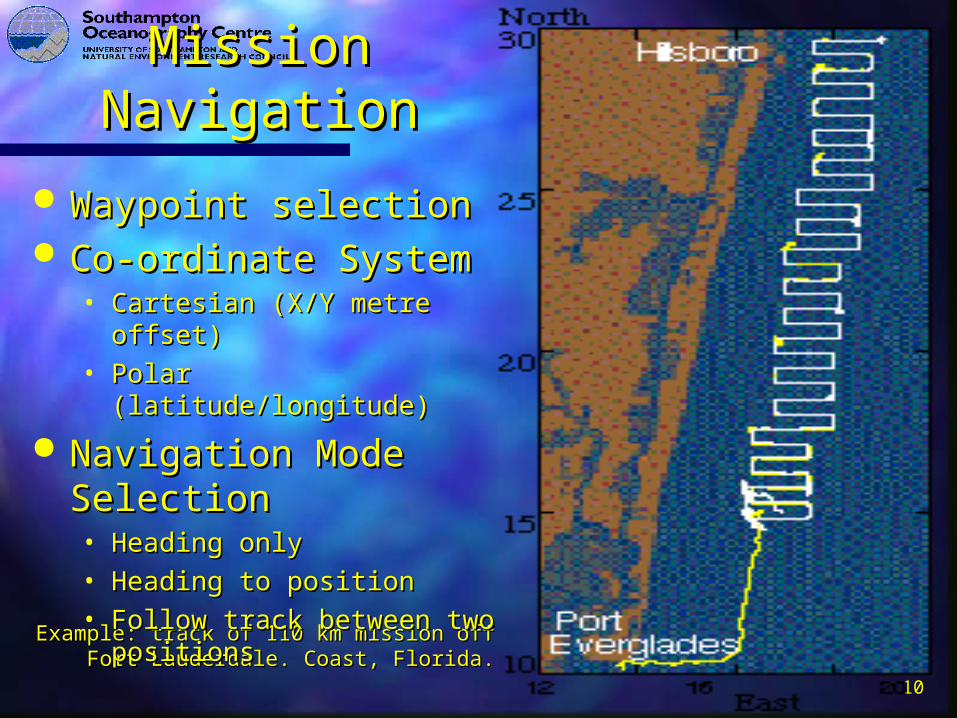
Mission NavigationMission Navigation
Example: track of 110 km mission off Fort Example: track of 110 km mission off Fort Lauderdale. Coast, Florida.Lauderdale. Coast, Florida.
Waypoint selectionWaypoint selection Co-ordinate SystemCo-ordinate System
• Cartesian (X/Y metre offset)Cartesian (X/Y metre offset)• Polar (latitude/longitude)Polar (latitude/longitude)
Navigation Mode Navigation Mode SelectionSelection• Heading onlyHeading only• Heading to positionHeading to position• Follow track between two Follow track between two
positionspositions
11
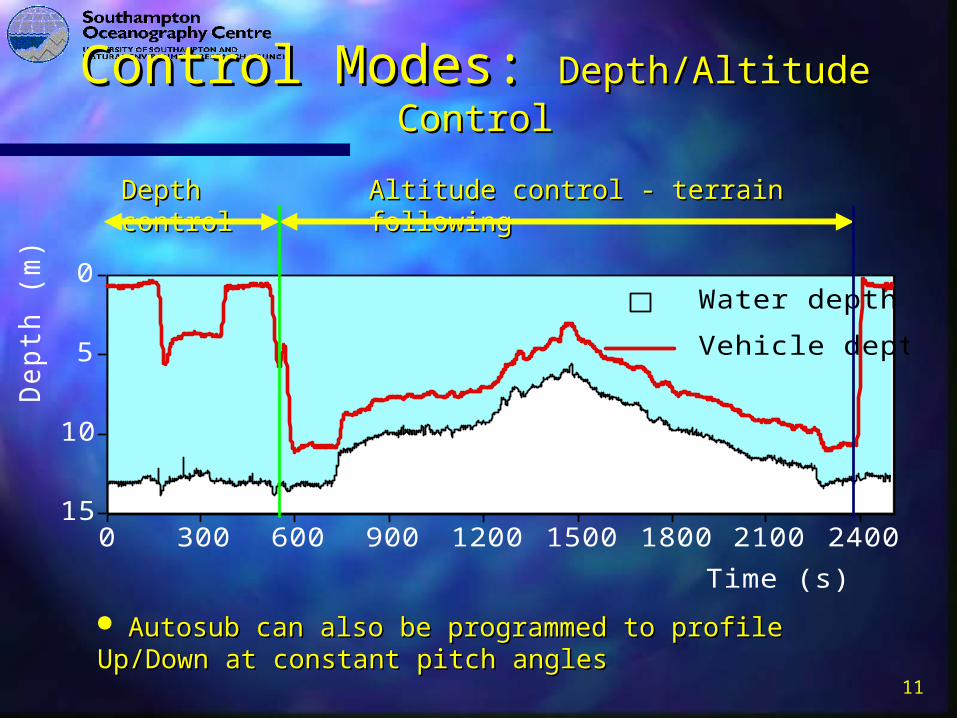
Control Modes: Control Modes: Depth/Altitude ControlDepth/Altitude Control
0
5
10
15
De
pth
(m
)
0 300 600 900 1200 1500 1800 2100 2400
Time (s)
Vehicle depth
Water depth
Depth controlDepth control Altitude control - terrain Altitude control - terrain followingfollowing
Autosub can also be programmed to profile Up/Down at Autosub can also be programmed to profile Up/Down at constant pitch anglesconstant pitch angles
12
Mission Safety IssuesMission Safety Issues
• In water obstaclesIn water obstacles• Terrain - vehicle pitch controlTerrain - vehicle pitch control• Surfacing zonesSurfacing zones• Mission depth and altitude limitsMission depth and altitude limits• Emergency abort timeoutsEmergency abort timeouts
13
Mission Preparation and Mission Preparation and InitiationInitiation
14
Mission Preparation and Mission Preparation and InitiationInitiation
Mission ScriptMission Script Configuration ScriptConfiguration Script Mission Script CheckingMission Script Checking Pre-Launch TasksPre-Launch Tasks Post-Launch / Pre-Start Post-Launch / Pre-Start
TasksTasks
15
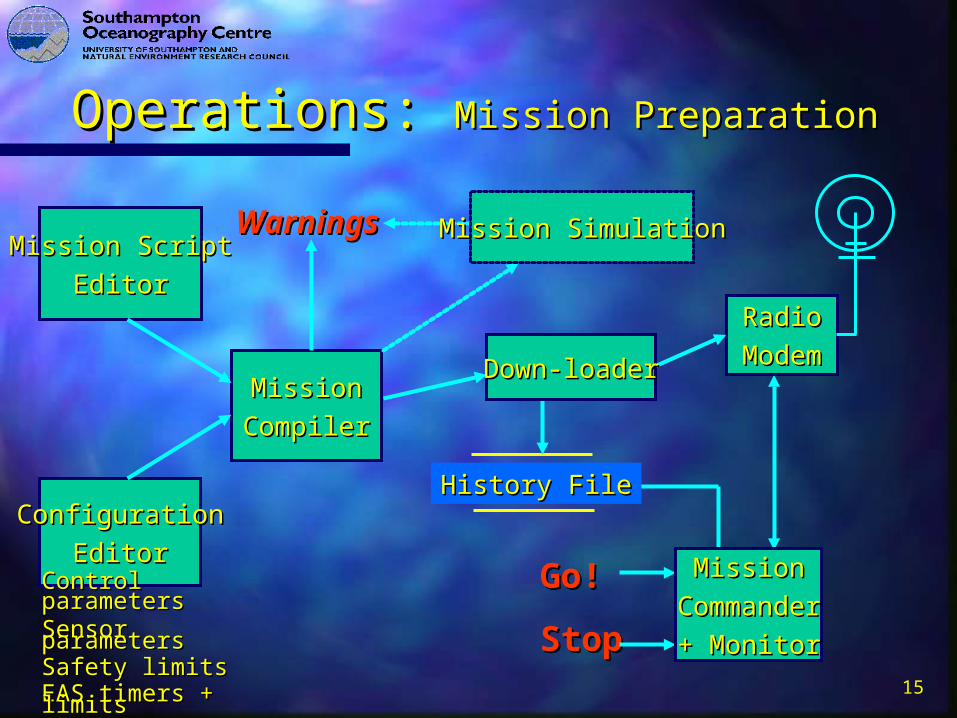
Operations: Operations: Mission PreparationMission Preparation
Mission ScriptMission Script
EditorEditor
ConfigurationConfiguration
EditorEditor
Control parameters Control parameters Sensor parametersSensor parametersSafety limitsSafety limitsEAS timers + limitsEAS timers + limits
MissionMission
CompilerCompiler
WarningsWarnings
Go! Go!
StopStop
MissionMission
CommanderCommander
+ Monitor+ Monitor
History FileHistory File
RadioRadio
ModemModemDown-loaderDown-loader
Mission SimulationMission Simulation
16
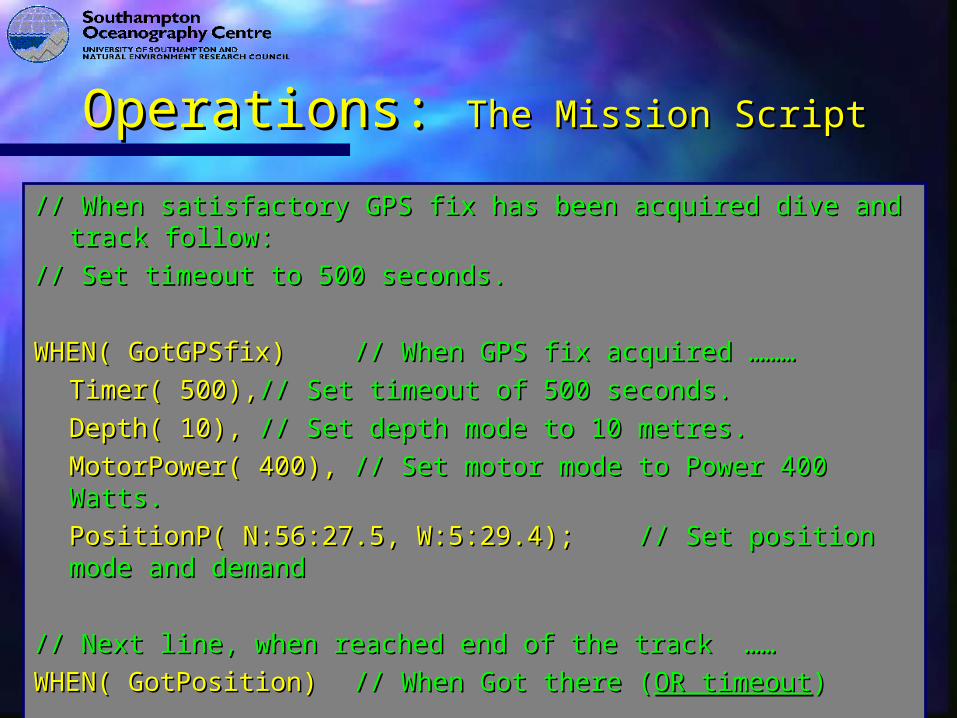
Operations: Operations: The Mission ScriptThe Mission Script
// When satisfactory GPS fix has been acquired dive and track // When satisfactory GPS fix has been acquired dive and track follow: follow:
// Set timeout to 500 seconds.// Set timeout to 500 seconds.
WHEN( GotGPSfix)WHEN( GotGPSfix) // When GPS fix acquired ………// When GPS fix acquired ………
Timer( 500),Timer( 500), // Set timeout of 500 seconds.// Set timeout of 500 seconds.
Depth( 10),Depth( 10), // Set depth mode to 10 metres.// Set depth mode to 10 metres.
MotorPower( 400), MotorPower( 400), // Set motor mode to Power 400 // Set motor mode to Power 400 Watts.Watts.
PositionP( N:56:27.5, W:5:29.4); PositionP( N:56:27.5, W:5:29.4); // Set position mode and // Set position mode and demanddemand
// Next line, when reached end of the track ……// Next line, when reached end of the track ……
WHEN( GotPosition)WHEN( GotPosition) // When Got there (// When Got there (OR timeoutOR timeout))
……… ………

17
Operations: Operations: The LaunchThe Launch
•Early launches through ship’s ‘A’ Frame.Early launches through ship’s ‘A’ Frame.
•Now we use a gantry system.Now we use a gantry system.
18
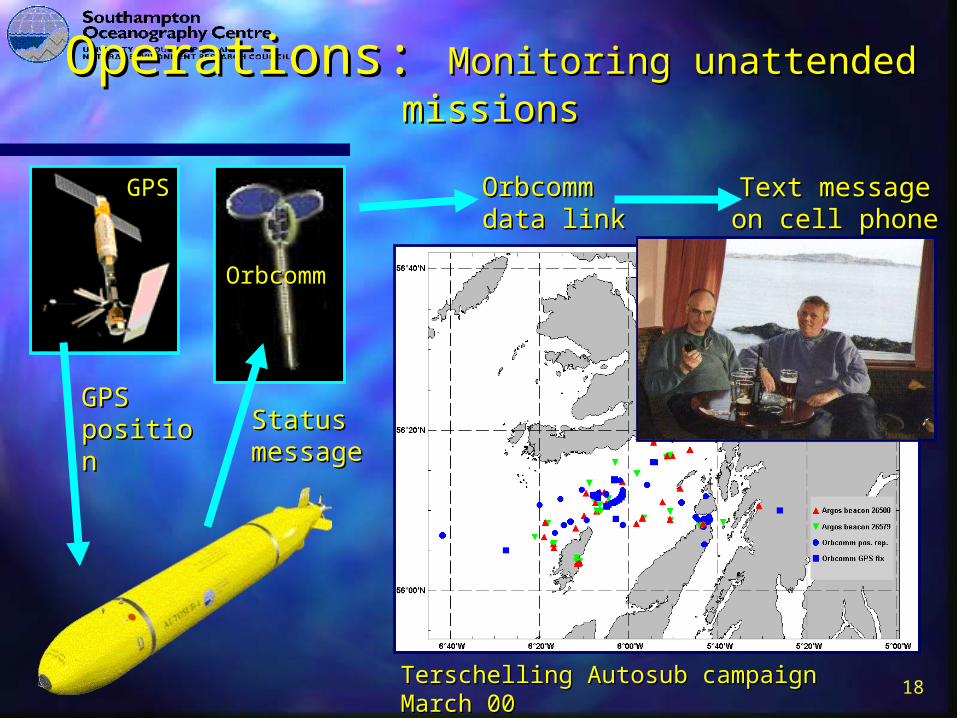
Operations: Operations: Monitoring unattended Monitoring unattended missionsmissions
GPSGPSpositionposition
OrbcommOrbcommdata linkdata link
Terschelling Autosub campaign Terschelling Autosub campaign March 00March 00
Text messageText messageon cell phoneon cell phone
GPSGPS
OrbcomOrbcommm
Status Status messagemessage
19
Mission End and Post MissionMission End and Post Mission
20
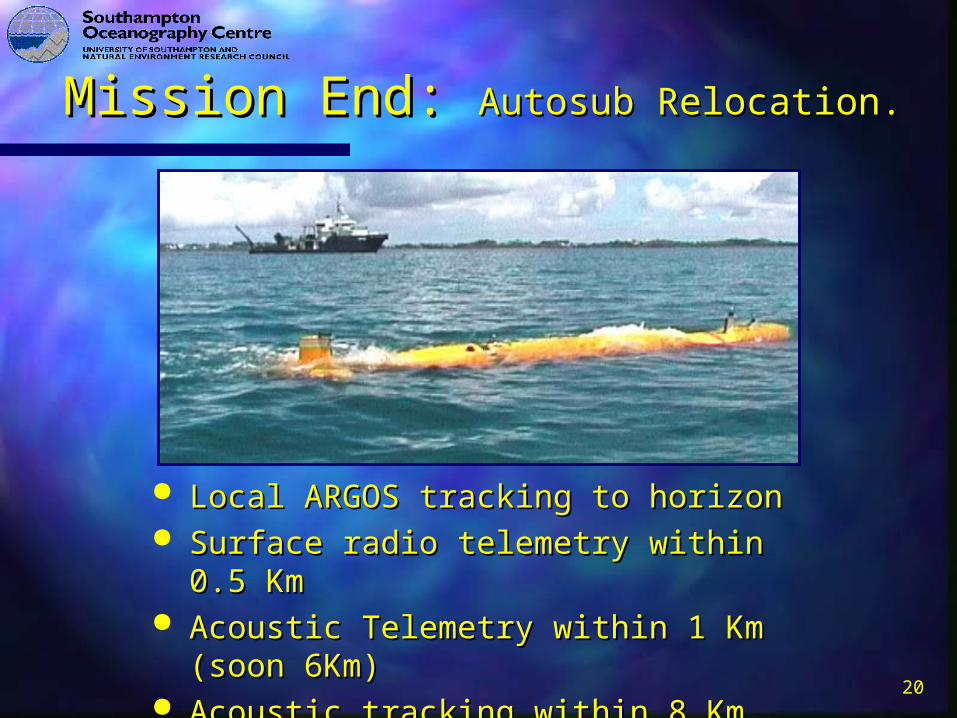
Mission End: Mission End: Autosub Relocation.Autosub Relocation.
Local ARGOS tracking to horizonLocal ARGOS tracking to horizon Surface radio telemetry within 0.5 KmSurface radio telemetry within 0.5 Km Acoustic Telemetry within 1 Km (soon Acoustic Telemetry within 1 Km (soon
6Km)6Km) Acoustic tracking within 8 KmAcoustic tracking within 8 Km
21
Mission End and Post MissionMission End and Post Mission
Logger Data RecoveryLogger Data Recovery Autosub RecoveryAutosub Recovery Navigation Postprocessing and Navigation Postprocessing and
Engineering data examinationEngineering data examination
22
The EndThe End
Dr. Miles PebodyDr. Miles PebodyOcean Engineering DivisionOcean Engineering Division
Southampton Oceanography CentreSouthampton Oceanography Centre
[email protected]@soc.soton.ac.uk
23
Autosub Systems: Autosub Systems: NavigationNavigation
GPS or DGPS fixes on the surface update the position GPS or DGPS fixes on the surface update the position estimate.estimate.
Special Navstar GPS antenna overcomes problems Special Navstar GPS antenna overcomes problems of washover on tail mounted antenna.of washover on tail mounted antenna.Broadcast (300 kHz) DGPS corrections used.Broadcast (300 kHz) DGPS corrections used.
Uses RDI 300kHz Doppler sonar (250 m range) for Uses RDI 300kHz Doppler sonar (250 m range) for velocity.& Seatex MRU6 compass for rotation into earth velocity.& Seatex MRU6 compass for rotation into earth co-ordinates.co-ordinates.
Biggest problem is heading dependent compass errors. Biggest problem is heading dependent compass errors.
Errors can be substantially reduced to about 0.5-1% of Errors can be substantially reduced to about 0.5-1% of distance travelled with calibration.distance travelled with calibration.
Calibration involves a short box mission.Calibration involves a short box mission.
24
Autosub Systems: Autosub Systems: Heading ControlHeading Control
• HeadingHeading
• Line Of Sight Line Of Sight - (- (Head towards demanded Waypoint)Head towards demanded Waypoint)..
• Track FollowTrack Follow- (- (Follow Straight Line Track Between Follow Straight Line Track Between
Two Waypoints). Two Waypoints).
Modes of Operation.Modes of Operation.
25
Future DevelopmentsFuture Developments
Integrated mission planning tools including mission Integrated mission planning tools including mission simulation and replay.simulation and replay.
Modify Mission Control and Emergency Abort for the Modify Mission Control and Emergency Abort for the more complex environment of under-ice missions.more complex environment of under-ice missions.
Power source - fuel cells, semi-fuel cells.Power source - fuel cells, semi-fuel cells.
Improved Collision Avoidance in the horizontal Improved Collision Avoidance in the horizontal
plane.plane. Improved Navigation. Use Ring Laser Gyro based Improved Navigation. Use Ring Laser Gyro based
INS. From 1% to 0.1% of distance traveled.INS. From 1% to 0.1% of distance traveled.
Improved Acoustic Communications and Location.Improved Acoustic Communications and Location.