Embed Size (px)
DESCRIPTION
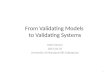
3 Temporal safety properties Something “bad” does not happen –Eg. A lock is never released without first being acquired Unlocked Locked Error U LL U
Citation preview

1
Automatically Validating Temporal Safety Properties of
Interfaces- Overview of SLAM
Parts of the slides are from http://research.microsoft.com/slam/presentations/spin2001.ppt

2
Checking API Usage
Application
C lib | DLL | COM |…
API
Does an application follow the “proper usage” rules of an API?

3
Temporal safety properties• Something “bad” does not happen
– Eg. A lock is never released without first being acquired
Unlocked Locked Error
U
L L
U

4
C program
Boolean program
c2bp
bebop
Fail, p
Pass
newton
SLIC
InstrumentedC program
predicates
Error
Spec.
predicates
Big picture of SLAM process

5
SLIC spec for Spinlock
enum { Unlocked=0, Locked=1 } state = Unlocked;
KeAcquireSpinLock.call { if (state==Locked) abort; else state = Locked;}KeReleaseSpinLock.call { if (state==Unlocked) abort; else state = Unlocked;}
Unlocked Locked Error
U
L L
U

6
Target program to validatedo {
KeAcquireSpinLock(&devExt->writeListLock);nPacketsOld = nPackets; request = devExt->WriteListHeadVa;if(request && request->status){
devExt->WriteListHeadVa = request->Next;
KeReleaseSpinLock(&devExt->writeListLock);irp = request->irp;if(request->status > 0){
irp->IoStatus.Status = STATUS_SUCCESS;irp->IoStatus.Information = request->Status;
} else{irp->IoStatus.Status = STATUS_UNSUCCESSFUL;irp->IoStatus.Information = request->Status;
}SmartDevFreeBlock(request);IoCompleteRequest(irp, IO_NO_INCREMENT);nPackets++;
}} while (nPackets != nPacketsOld);
KeReleaseSpinLock(&devExt->writeListLock);
Question:Is locking protocol respected?

7
Safety to Reachability
Program P
SLICspec S
SLIC
Program P satisfies specification S
Label ERROR is not reachable in P’
InstrumentedProgram P’

8
do {KeAcquireSpinLock_call(); KeAcquireSpinLock(&devExt->writeListLock);nPacketsOld = nPackets; request = devExt->WriteListHeadVa;if(request && request->status){ devExt->WriteListHeadVa = request->Next; KeReleaseSpinLock_call(); KeReleaseSpinLock(&devExt->writeListLock); irp = request->irp; if(request->status > 0){ irp->IoStatus.Status = STATUS_SUCCESS; irp->IoStatus.Information = request->Status; } else { irp->IoStatus.Status = STATUS_UNSUCCESSFUL; irp->IoStatus.Information = request->Status; } SmartDevFreeBlock(request); IoCompleteRequest(irp, IO_NO_INCREMENT); nPackets++;}
} while (nPackets != nPacketsOld);KeReleaseSpinLock_call();KeReleaseSpinLock(&devExt->writeListLock);
enum { Unlocked=0, Locked } state = Unlocked;
void slic_abort() { ERROR:}void KeAcquireSpinLock_call () { if(state==Locked) slic_abort(); else state = Locked;}void KeReleaseSpinLock_call () { if(state==Unlocked) slic_abort(); else state = Unlocked;}
Question:Is locking protocol respected?
Equivalently:Is label ERROR reachable?
Instrumented Program

9
C program
Boolean program
c2bp
bebop
Fail, p
Pass
newton
SLIC
InstrumentedC program
predicates
Error
Spec.
predicates
Big picture of SLAM process

10
Predicate abstraction by C2BP
Instrumentedprogram P’
Booleanprogram BP(P’,E0)
C2BP
Initialpredicates E0
state==Locked, state==Unlocked

11
do {KeAcquireSpinLock_call(); skip;skip; skip;if(*){ skip; KeReleaseSpinLock_call(); skip; skip; if(*){ skip; skip; } else { skip; skip; } skip; skip; skip;}
} while (*);KeReleaseSpinLock_call();skip;
decl {state==Locked},{state==Unlocked} := F,T;
void slic_abort() { ERROR:}
void KeAcquireSpinLock_call () { if({state==Locked}) slic_abort(); else {state==Locked},{state==Unlocked} := T,F;}
void KeReleaseSpinLock_call () { if({state==Unlocked}) slic_abort(); else {state==Locked},{state==Unlocked} := F,T;}
Question:Is locking protocol respected?
Equivalently:Is label ERROR reachable?
Initial boolean Program

12
Model-check by BEBOPdo {
KeAcquireSpinLock_call(); skip;skip; skip;if(*){ skip; KeReleaseSpinLock_call(); skip; skip; if(*){ skip; skip; } else { skip; skip; } skip; skip; skip;}
} while (*);KeReleaseSpinLock_call();skip;
decl {state==Locked},{state==Unlocked} := F,T;
void slic_abort() { ERROR:}
void KeAcquireSpinLock_call () { if({state==Locked}) slic_abort(); else {state==Locked},{state==Unlocked} := T,F;}
void KeReleaseSpinLock_call () { if({state==Unlocked}) slic_abort(); else {state==Locked},{state==Unlocked} := F,T;}
{state==Unlocked}Æ :{state==Locked}
:{state==Unlocked}Æ{state==Locked}
reached ERROR label

13
The execution path to blame!
do {KeAcquireSpinLock_call(); KeAcquireSpinLock(&devExt->writeListLock);nPacketsOld = nPackets; // s1request = devExt->WriteListHeadVa; // s2if(request && request->status){ // s3 devExt->WriteListHeadVa = request->Next; KeReleaseSpinLock_call(); KeReleaseSpinLock(&devExt->writeListLock); irp = request->irp; if(request->status > 0){ irp->IoStatus.Status = STATUS_SUCCESS; irp->IoStatus.Information = request->Status; } else { irp->IoStatus.Status = STATUS_UNSUCCESSFUL; irp->IoStatus.Information = request->Status; } SmartDevFreeBlock(request); IoCompleteRequest(irp, IO_NO_INCREMENT); nPackets++;}
} while (nPackets != nPacketsOld); // s4KeReleaseSpinLock_call();KeReleaseSpinLock(&devExt->writeListLock);
enum { Unlocked=0, Locked } state = Unlocked;
void slic_abort() { ERROR: // s6}void KeAcquireSpinLock_call () { if(state==Locked) slic_abort(); // s5 else state = Locked; // s0}void KeReleaseSpinLock_call () { if(state==Unlocked) slic_abort(); else state = Unlocked;}
s0: state = Locked; s1: nPacketsOld = nPackets; s2: request = devExt->WriteListHeadVa;s3: assume(!request);s4: assume(nPackets != nPacketsOld);s5: assume(state==Locked);s6: ERROR:

14
Time for NEWTONs0: state = Locked; s1: nPacketsOld = nPackets; s2: request = devExt->WriteListHeadVa;s3: assume(!request);s4: assume(nPackets != nPacketsOld);s5: assume(state==Locked);s6: ERROR:
Location Value Dependencies
0. state Locked ()
1. nPackets ()
2. nPacketsOld 1
3. devExt ()
4. ->WriteListHeadVa 3
5. request 3, 4
Conditions Dependencies
!( ) 5
( != ) 1, 2
New predicate!nPackets==nPacketsOld

15
C program
Boolean program
c2bp
bebop
Fail, p
Pass
newton
SLIC
InstrumentedC program
predicates
Error
Spec.
predicates
Big picture of SLAM process

16
do {KeAcquireSpinLock_call(); skip;b := T; // nPackets = nPacketsOld;skip;if(*){ skip; KeReleaseSpinLock_call(); skip; skip; if(*){ skip; skip; } else { skip; skip; } skip; skip; b := b ? F : *; // nPackets++;}
} while(!b); // while (nPackets!=nPacketsOld);KeReleaseSpinLock_call();skip;
Variable b represents (nPackets==nPacketsOld)
decl {state==Locked},{state==Unlocked} := F,T;
void slic_abort() { ERROR:}void KeAcquireSpinLock_call () { if({state==Locked}) slic_abort(); else {state==Locked},{state==Unlocked} := T,F;}void KeReleaseSpinLock_call () { if({state==Unlocked}) slic_abort(); else {state==Locked},{state==Unlocked} := F,T;}
Question:Is locking protocol respected?
Equivalently:Is label ERROR reachable?
The second boolean Program

17
Model-check again by BEBOPdo {
KeAcquireSpinLock_call(); skip;b := T; skip;if(*){ skip;
KeReleaseSpinLock_call(); skip; skip; if(*){ skip; skip; } else { skip; skip; } skip; skip; b := b ? F : *; }
} while(!b);KeReleaseSpinLock_call();skip;
*
decl {state==Locked},{state==Unlocked} := F,T;
void slic_abort() { ERROR:}
void KeAcquireSpinLock_call () { if({state==Locked}) slic_abort(); else {state==Locked},{state==Unlocked} := T,F;}
void KeReleaseSpinLock_call () { if({state==Unlocked}) slic_abort(); else {state==Locked},{state==Unlocked} := F,T;}
{state==Unlocked}Æ :{state==Locked}
:{state==Unlocked}Æ{state==Locked}
reached ERROR label
*T
T
T
F

18
C program
Boolean program
c2bp
bebop
Fail, p
Pass
newton
SLIC
InstrumentedC program
predicates
Error
Spec.
predicates
Big picture of SLAM process

19
C2BP
• Automatic predicate abstraction of C• What is the predicate language?
– Pure C boolean expressions• Input: a C program P and set of predicates E• Output: a boolean program C2BP(P,E) that is
– a sound abstraction of P– a precise abstraction of P
• Difficulties– procedures– pointers

20
BEBOP
Reachability analysis of boolean programs
Symbolic version of [Reps-Horwitz-Sagiv, POPL’95] interprocedural data flow analysis Explicit representation of control flow Implicit representation of reachable states via BDDs

21
NEWTON• Symbolically executes (interprocedural) path in C
program
• Checks for path infeasibility using decision procedures (theorem provers: Simplify, Vampyre)
• If infeasibility detected– Find weak(est) condition implying the infeasibility– Obtains new predicates

22
Contributions• Use of boolean programs for program
abstractions• C2BP : the first automatic predicate
abstraction tool for a full-scale language• BEBOP : the first model checker to handle
procedure calls using inter-procedural DFA• Global analysis only on the boolean
program abstractions : scalable…?

23
Defects• Defects of SLAM
– Uses a logical memory model• Assumes for all i,j : p[i] = p[j]
– No guarantee on the termination of iterative refinement
• Defects of the paper– No experimental results
(describes their experiences only)