Embed Size (px)
Citation preview

1
Approach Procedures Approach Procedures
Barb Cordell

2
Missed Approach textual
Description
Minimum Safe
Altitude
Textual Circling remarks
Segment Legs
Minimums
Holding
Terminal Procedure Publication
Segment Points

3
OverviewOverview
•Start with a high level overview
•Briefly walk through different sections of an approach
•Segment Points
•Segments
•Holding
•Terminal Arrival Area (RNAV)
•Minimum Safe/Sector Area and Emergency Safe Area
•Circling
•Minimums

4
High Level Overview - ApproachHigh Level Overview - Approach
Procedure
communicationFailureDescription : txtDescrdescription : txtDescrdesignCriteria : codeDesignStdcodingStandard : codeProcCodingStdoperatingStatus : codeStatusProcedureflightChecked : codeYesNo
(f rom Procedure)
<<feature>>
InstrumentApproachProcedure
approachPrefix : codeApproachPrefixapproachType : codeApproachTypemultipleIdentification : codeUpperAlphacopterTrack : valAngleBrgcirclingIdentification : codeUpperAlphaname : txtNamecourseReversalDescription : txtDescradditionalEquipment : codeApproachEquipmentAddl...channelGNSS : valChannelNumber
<<feature>>
Inheritance

5
High Level Overview - ApproachHigh Level Overview - Approach
CirclingArea(f rom 5 - Circling)
<<feature>>
SafeAltitudeArea(f rom 2 - Minimum and Emergency Saf e Altitude)
<<feature>> TerminalArrivalArea(f rom 3 - Terminal Arriv al Area)
<<feature>>
LandingAreaCollection<<object>>
MissedApproachGroup
missedApproachDescription : TextDescriptionTypealternateClimbInstruction : TextDescriptionTypealternateClimbAltitude : ValDistanceVerticalType
<<object>>
ServiceOnInstrumentApproachProcedure
remoteFlag : CodeYesNoTypeprimaryFlag : CodeYesNoType
(f rom Serv ice)
<<feature>>
0..*
+Altimeter
0..*identifies
InstrumentApproachProcedure
approachPrefix : CodeApproachPrefixTypeapproachType : CodeApproachTypemultipleIdentification : CodeUpperAlphaTypecopterTrack : ValBearingTypecirclingIdentification : CodeUpperAlphaTypename : TextNameTypecourseReversalDescription : TextDescriptionTypeadditionalEquipment : CodeApproachEquipmentAdditionalTypechannelGNSS : ValChannelNumberType
<<feature>>
0..*
1
0..*
1
isUsedOn0..2
1..*
0..2
1..*
protects
0..*
1
0..*
1
supplies
0..10..1
isForLandingAt
0..*0..*
includes
0..*
1
0..*
1
isFurnishedOn
AirportHeliport(f rom AirportHeliport)
<<feature>>
Procedure
communicationFailureDescription : TextDescriptionTypedescription : TextDescriptionTypedesignCriteria : CodeDesignStandardTypecodingStandard : CodeProcedureCodingStandardTypeoperatingStatus : CodeStatusProcedureTypeflightChecked : CodeYesNoType
(from Procedure)
<<feature>>
11..* 11..*services
SegmentLeg(from 4 - Segment Leg)
<<feature>>1..*
1..*
1..*
1..*
contains
ProcedureTransition
transitionId : CodeDesignatedPointDesignatorTypetype : CodeProcedurePhaseTypeseqNumberARINC : NoSequenceType
(f rom 4 - Segment Leg)
<<object>>
Curve(f rom Geometry )
<<object>>
0..10..1hasTrajectory
0..10..1
represents

6
High Level Overview – Transition and SegmentHigh Level Overview –
Transition and Segment
WABAKEGYUE
JESKI
CONNU
JIMMY
WABAK transition
JESKI transition
Procedure
communicationFailureDescription : TextDescriptionTypedescription : TextDescriptionTypedesignCriteria : CodeDesignStandardTypecodingStandard : CodeProcedureCodingStandardTypeoperatingStatus : CodeStatusProcedureTypeflightChecked : CodeYesNoType
(from Procedure)
<<feature>>
SegmentLeg(from 4 - Segment Leg)
<<feature>>1..*
1..*
1..*
1..*
contains
ProcedureTransition
transitionId : CodeDesignatedPointDesignatorTypetype : CodeProcedurePhaseTypeseqNumberARINC : NoSequenceType
(f rom 4 - Segment Leg)
<<object>>
Curve(f rom Geometry )
<<object>>
0..10..1hasTrajectory
0..10..1
represents

7
High Level Overview - ApproachHigh Level Overview - Approach
CirclingArea(f rom 5 - Circling)
<<feature>>
SafeAltitudeArea(f rom 2 - Minimum and Emergency Saf e Altitude)
<<feature>> TerminalArrivalArea(f rom 3 - Terminal Arriv al Area)
<<feature>>
LandingAreaCollection<<object>>
MissedApproachGroup
missedApproachDescription : TextDescriptionTypealternateClimbInstruction : TextDescriptionTypealternateClimbAltitude : ValDistanceVerticalType
<<object>>
ServiceOnInstrumentApproachProcedure
remoteFlag : CodeYesNoTypeprimaryFlag : CodeYesNoType
(f rom Serv ice)
<<feature>>
0..*
+Altimeter
0..*identifies
InstrumentApproachProcedure
approachPrefix : CodeApproachPrefixTypeapproachType : CodeApproachTypemultipleIdentification : CodeUpperAlphaTypecopterTrack : ValBearingTypecirclingIdentification : CodeUpperAlphaTypename : TextNameTypecourseReversalDescription : TextDescriptionTypeadditionalEquipment : CodeApproachEquipmentAdditionalTypechannelGNSS : ValChannelNumberType
<<feature>>
0..*
1
0..*
1
isUsedOn0..2
1..*
0..2
1..*
protects
0..*
1
0..*
1
supplies
0..10..1
isForLandingAt
0..*0..*
includes
0..*
1
0..*
1
isFurnishedOn
AirportHeliport(f rom AirportHeliport)
<<feature>>
Procedure
communicationFailureDescription : TextDescriptionTypedescription : TextDescriptionTypedesignCriteria : CodeDesignStandardTypecodingStandard : CodeProcedureCodingStandardTypeoperatingStatus : CodeStatusProcedureTypeflightChecked : CodeYesNoType
(from Procedure)
<<feature>>
11..* 11..*services
SegmentLeg(from 4 - Segment Leg)
<<feature>>1..*
1..*
1..*
1..*
contains
ProcedureTransition
transitionId : CodeDesignatedPointDesignatorTypetype : CodeProcedurePhaseTypeseqNumberARINC : NoSequenceType
(f rom 4 - Segment Leg)
<<object>>
Curve(f rom Geometry )
<<object>>
0..10..1hasTrajectory
0..10..1
represents
8
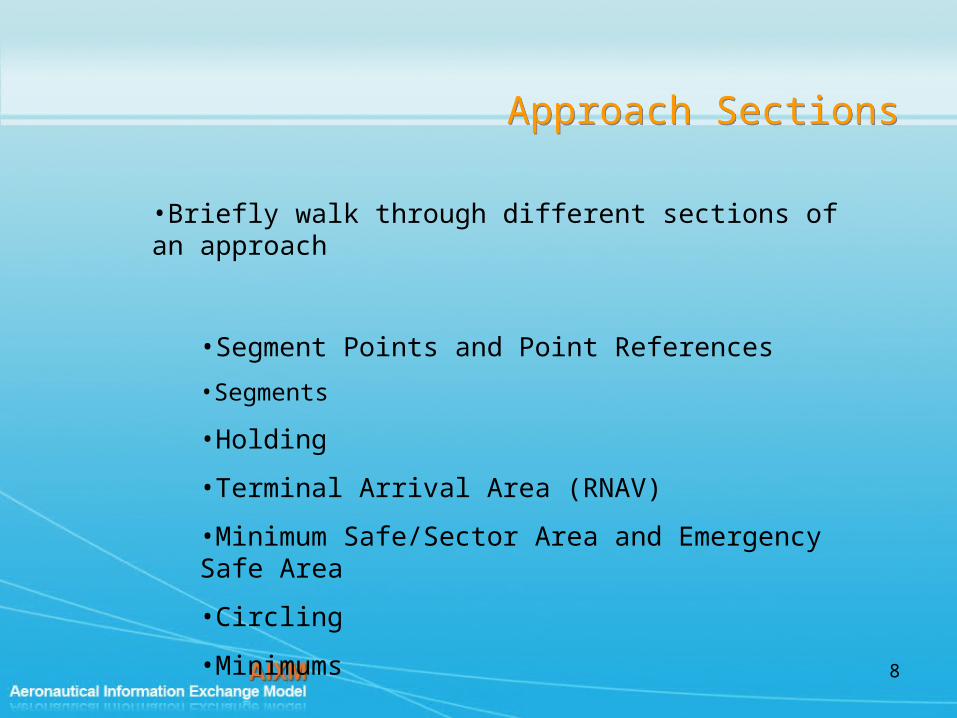
Approach SectionsApproach Sections
•Briefly walk through different sections of an approach
•Segment Points and Point References
•Segments
•Holding
•Terminal Arrival Area (RNAV)
•Minimum Safe/Sector Area and Emergency Safe Area
•Circling
•Minimums

9
Segment PointsSegment Points
2. References
Uses ODK VORTAC
Angle Indication 010
Distance Indication 10
1. Significant Point
• Name = WABAK
3. SegmentPoint
• Fly over
• Not a WayPoint
• No Radar available
SignificantPoint(from Navaids Points)
<<choice>>SegmentPoint
reportingATC : CodeATCReportingTypeflyOver : CodeYesNoTypewaypoint : CodeYesNoTyperadarGuidance : CodeYesNoType
<<object>>10..* 10..*isLocatedAt
PointReference
role : CodeReferenceRoleTypepriorFixTolerance : ValDistanceSignedTypepostFixTolerance : ValDistanceSignedType
<<object>>
0..*0..*
uses
TerminalSegmentPoint
role : CodeProcedureFixRoleTypeleadRadial : ValBearingTypeleadDME : ValDistanceTypeindicatorFACF : CodeYesNoType
<<object>>
SegmentLeg(from 4 - Segment Leg)
<<feature>>0..10..1
startsAt
0..10..1
endsAt0..10..1
hasArcCenter
SignificantPoint(from Navaids Points)
<<choice>>SegmentPoint
reportingATC : CodeATCReportingTypeflyOver : CodeYesNoTypewaypoint : CodeYesNoTyperadarGuidance : CodeYesNoType
<<object>>10..* 10..*isLocatedAt
PointReference
role : CodeReferenceRoleTypepriorFixTolerance : ValDistanceSignedTypepostFixTolerance : ValDistanceSignedType
<<object>>
0..*0..*
uses
TerminalSegmentPoint
role : CodeProcedureFixRoleTypeleadRadial : ValBearingTypeleadDME : ValDistanceTypeindicatorFACF : CodeYesNoType
<<object>>
SegmentLeg(from 4 - Segment Leg)
<<feature>>0..10..1
startsAt
0..10..1
endsAt0..10..1
hasArcCenter

10
Segment Leg SpecializationSegment Leg Specialization
IntermediateLeg
requiredNavigationPerformance : CodeRNPTypeverticalAngle : ValAngleType
<<feature>>
MissedApproachLeg
type : CodeMissedApproachTypethresholdAfterMAPT : CodeYesNoTypeheightMAPT : ValDistanceVerticalTyperequiredNavigationPerformance : CodeRNPTypeverticalAngle : ValAngleType
<<feature>>
InitialLeg
requiredNavigationPerformance : CodeRNPTypeverticalAngle : ValAngleType
<<feature>>
ArrivalFeederLeg
requiredNavigationPerformance : CodeRNPTypeverticalAngle : ValAngleType
<<feature>>
InstrumentApproachProcedure(from 1 - Approach)
<<feature>>
ApproachLeg<<feature>>
1
1..*
1
1..* isPartOf
ArrivalLeg<<feature>>
StandardInstrumentArrival(from Arrival Procedure)
<<feature>>
1..*
1
1..*
1isPartOf
StandardInstrumentDeparture(from Departure Procedure)
<<feature>>
DepartureLeg<<feature>>
1
1..*
1
1..*isPartOf
SignificantPoint(from Navaids Points)
<<choice>>TerminalSegmentPoint
(from Point Reference)
<<object>>
FinalLeg
guidanceSystem : CodeFinalGuidanceTypelandingSystemCategory : CodeLandingAidCategoryTypeminimumBaroVnavTemperature : ValTemperatureTypernpDMEAuthorized : CodeYesNoType
<<feature>>
0..10..1
hasFinalPathAlignmentPoint
0..10..1
hasVisualDescentPoint
SegmentLeg
endConditionDesignator : CodeSegmentTerminationTypelegPath : CodeTrajectoryTypelegTypeARINC : CodeSegmentPathTypecourse : ValBearingTypecourseType : CodeCourseTypecourseDirection : CodeDirectionReferenceTypeturnDirection : CodeDirectionTurnTypespeedLimit : ValSpeedTypespeedReference : CodeSpeedReferenceTypespeedInterpretation : CodeCrossingTypebankAngle : ValAngleTypelength : ValDistanceTypeduration : ValDurationTypeprocedureTurnRequired : CodeYesNoTypeupperLimitAltitude : ValDistanceTypeupperLimitReference : CodeVerticalReferenceTypelowerLimitAltitude : ValDistanceVerticalTypelowerLimitReference : CodeVerticalReferenceTypealtitudeInterpretation : CodeCrossingTypealtitudeOverrideATC : ValDistanceVerticalTypealtitudeOverrideReference : CodeVerticalReferenceType
<<feature>>

11
Approach SegmentsApproach Segments

12
Approach SegmentsApproach Segments
•Defined WABAK/ ODK R-010 10 DME
•Defined RIXAE/ODK R-048 10 DME
•Define Approach Segment Attributes
•Define Segment Points
•Flyby
•Compulsory
•role – for start (IAF) for end (IF)
TerminalSegmentPoint
role : codeIapFixleadRadial : valAngleBrgleadDME : valDistindicatorFACF : codeYesNo
(from Navaids Points)
<<object>>
SegmentLeg
legType : codeTypeLeglegPath : codePathTrajlegTypeARINC : codeTypeProcPathrequiredNavigationPerformance : codeRnpcourse : valAngleBrgcourseType : codeTypeCoursecourseDirection : codeDirRefturnDirection : codeDirTurnverticalAngle : valAnglespeedLimit : valSpeedspeedReference : codeSpeedRefbankAngle : valAnglelength : valDistduration : valDurprocedureTurnRequired : codeYesNoupperLimitAltitude : valDistupperLimitReference : codeDistVerlowerLimitAlti tude : valDistVerlowerLimitReference : codeDistVeralti tudeInterpretation : codeDescrDistVeralti tudeOverrideATC : valDistVeralti tudeOverrideReference : codeDistVer
<<feature>>
0..10..1startingAt
0..10..1
endingAt0..10..1
isArcCenter
SegmentPoint
reportingATC : codeRepAtcflyBy : codeYesNowaypoint : codeYesNoradarGuidance : codeYesNo
(from Navaids Points)
<<object>>

13
Approach SegmentsApproach Segments
•legTypeARINC = RF
•CourseType = track
•turnDirection = R
•flyBy = Yes
•lowerLimitAltitude = 1600
•procedureTurnRequired = N

14
Approach SegmentsApproach Segments
SegmentLeg
legType : codeTypeLeglegPath : codePathTrajlegTypeARINC : codeTypeProcPathrequiredNavigationPerformance : codeRnpcourse : valAngleBrgcourseType : codeTypeCoursecourseDirection : codeDirRefturnDirection : codeDirTurnverticalAngle : valAnglespeedLimit : valSpeedspeedReference : codeSpeedRefbankAngle : valAnglelength : valDistduration : valDurprocedureTurnRequired : codeYesNoupperLimitAlti tude : valDistupperLimitReference : codeDistVerlowerLimitAltitude : valDistVerlowerLimitReference : codeDistVeralti tudeInterpretation : codeDescrDistVeralti tudeOverrideATC : valDistVeralti tudeOverrideReference : codeDistVer
<<feature>>
1
hasTrajectory
0..1
1
0..1
Curve
horizontalAccuracy : valDist...
(from Geometry)
<<object>>
isVali...
...
11
...
AircraftCharacteristics
type : codeTypeAcftengine : codeTypeAcftEnginenumberEngine : codeAcftEngineNotypeAircraftICAO : codeIcaoAircraftType...aircraftLandingCategory : codeCatAcft
(from Shared)
<<object>>
l imitedByDist...
0..10..1 DistanceIndication
distance : valDistminimumReceptionAlti tude : valDistVertype : codeTypeDistInd
(from Navaids Points)
<<object>>
AngleIndication
angle : valAngleBrgangleType : codeTypeAngleBrgindicationDirection : codeDirReftrueAngle : valAngleBrgcardinalDirection : codeCardinalDirectionminimumReceptionAlti tude : valDistVeralongTrackFlagDeleteMe : codeYesNo
(from Navaids Points)
<<object>>
0..10..1
l imitedByAngle
15
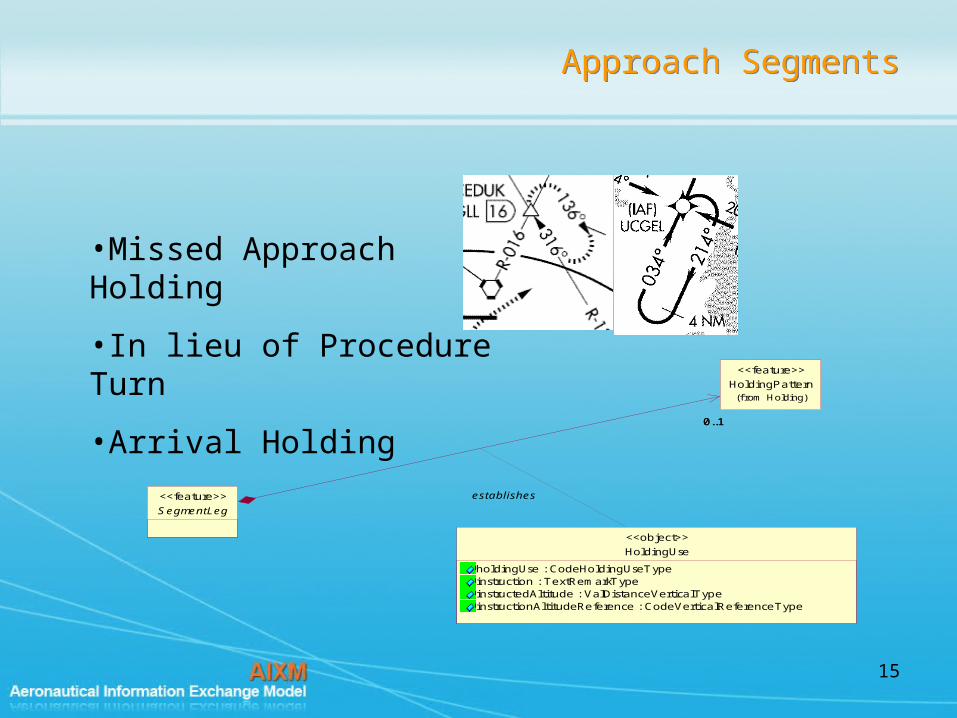
Approach SegmentsApproach Segments
•Missed Approach Holding
•In lieu of Procedure Turn
•Arrival Holding
SegmentLeg
<<feature>>
0..10..1
HoldingPattern(f rom Holding)
<<feature>>
establishes
HoldingUse
holdingUse : CodeHoldingUseTypeinstruction : TextRemarkTypeinstructedAltitude : ValDistanceVerticalTypeinstructionAltitudeReference : CodeVerticalReferenceType
<<object>>

16
Approach SegmentsApproach Segments
•Segments that do not start or end at a given point (Climb to altitude or a dog leg)
•Define a Designated Point of type “Designed Point”
•ATTRIBUTE: endConditionDesignator
•Altitude
•Distance
•Duration
•Intercept

17
Approach ConditionApproach Condition
Sidestep and circling to specific runway
Precision
FASDataBlock
horizontalAlarmLimit : ValAlarmLimitTypeverticalAlarmLimit : ValAlarmLimitTypethresholdCourseWidth : ValDistanceTypelengthOffset : ValDistanceTypeCRCRemainder : ValHexType
<<object>>
Minima
altitude : ValDistanceVerticalTypealtitudeCode : CodeMinimumAltitudeTypealtitudeReference : CodeVerticalReferenceTypeheight : ValDistanceVerticalTypemilitaryHeight : ValDistanceVerticalTyperadioHeight : ValDistanceVerticalTypeheightCode : CodeMinimumHeightTypeheightReference : CodeHeightReferencevisibility : ValDistanceTypemilitaryVisibility : ValDistanceVerticalTypemandatoryRVR : CodeYesNoTyperemoteAltimeterMinima : CodeYesNoType
(f rom 6 - Minima)
<<object>>
RunwayDirection(f rom Runway )
<<feature>>
ServiceOnInstrumentApproachProcedure(f rom Serv ice)
<<feature>>
FinalLeg<<feature>>
0..10..1
has AircraftCharacteristic
type : CodeAircraftTypeengine : CodeAircraftEngineTypenumberEngine : CodeAircraftEngineNumberTypetypeAircraftICAO : CodeAircraftICAOTypeaircraftLandingCategory : CodeAircraftCategoryTypemaxWingSpan : ValDistanceTypemaxWeight : ValWeightTypemaxPassengers : NoNumberType
(f rom Shared)
<<object>>
ApproachCondition
finalApproachPath : CodeMinimaFinalApproachPathTyperequiredNavigationPerformance : CodeRNPTypeverticalAngle : ValAngleType
(f rom 1 - Approach)
<<object>>
0..10..1
indicates
......
appliesTo
0..1
+altimeter
0..1
identifies
1
0..*
1
0..*
hasConditions
0..*0..*
isApprovedFor
18
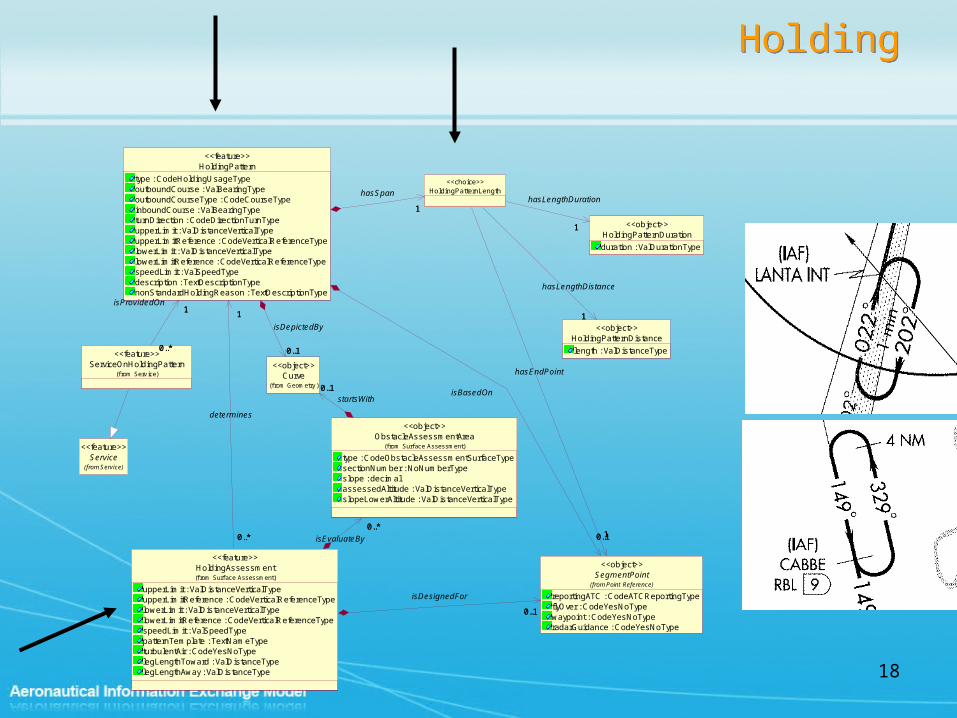
HoldingHolding
Service(from Service)
<<feature>>
HoldingPatternDuration
duration : ValDurationType
<<object>>
HoldingPatternDistance
length : ValDistanceType
<<object>>
HoldingPatternLength<<choice>>
11
hasLengthDuration
11
hasLengthDistance
ServiceOnHoldingPattern(f rom Serv ice)
<<feature>>
Curve(f rom Geometry )
<<object>>
SegmentPoint
reportingATC : CodeATCReportingTypeflyOver : CodeYesNoTypewaypoint : CodeYesNoTyperadarGuidance : CodeYesNoType
(from Point Reference)
<<object>>
11
hasEndPoint
HoldingPattern
type : CodeHoldingUsageTypeoutboundCourse : ValBearingTypeoutboundCourseType : CodeCourseTypeinboundCourse : ValBearingTypeturnDirection : CodeDirectionTurnTypeupperLimit : ValDistanceVerticalTypeupperLimitReference : CodeVerticalReferenceTypelowerLimit : ValDistanceVerticalTypelowerLimitReference : CodeVerticalReferenceTypespeedLimit : ValSpeedTypedescription : TextDescriptionTypenonStandardHoldingReason : TextDescriptionType
<<feature>>
11
hasSpan
0..*
1
0..*
1isProvidedOn
0..10..1
isBasedOn
0..10..1
isDepictedBy
HoldingAssessment
upperLimit : ValDistanceVerticalTypeupperLimitReference : CodeVerticalReferenceTypelowerLimit : ValDistanceVerticalTypelowerLimitReference : CodeVerticalReferenceTypespeedLimit : ValSpeedTypepatternTemplate : TextNameTypeturbulentAir : CodeYesNoTypelegLengthToward : ValDistanceTypelegLengthAway : ValDistanceType
(f rom Surf ace Assessment)
<<feature>>
0..10..1
isDesignedFor
0..*
1
0..*
1
determines
ObstacleAssessmentArea
type : CodeObstacleAssessmentSurfaceTypesectionNumber : NoNumberTypeslope : decimalassessedAltitude : ValDistanceVerticalTypeslopeLowerAltitude : ValDistanceVerticalType
(f rom Surf ace Assessment)
<<object>>
0..10..1startsWith
0..*0..*
isEvaluateBy

19
Unplanned HoldingUnplanned Holding
PointReference
role : CodeReferenceRoleTypepriorFixTolerance : ValDistanceSignedTypepostFixTolerance : ValDistanceSignedType
(f rom Point Ref erence)
<<object>>
SignificantPoint(from Navaids Points)
<<choice>>
SegmentPoint
reportingATC : CodeATCReportingTypeflyOver : CodeYesNoTypewaypoint : CodeYesNoTyperadarGuidance : CodeYesNoType
(from Point Reference)
<<object>>
0..*0..*uses
0..*
1
0..*
1
isLocatedAt
HoldingAssessment
upperLimit : ValDistanceVerticalTypeupperLimitReference : CodeVerticalReferenceTypelowerLimit : ValDistanceVerticalTypelowerLimitReference : CodeVerticalReferenceTypespeedLimit : ValSpeedTypepatternTemplate : TextNameTypeturbulentAir : CodeYesNoTypelegLengthToward : ValDistanceTypelegLengthAway : ValDistanceType
(f rom Surf ace Assessment)
<<feature>>
0..10..1
isDesignedFor
UnplannedHolding
unplannedHolding : CodeApprovalTypeauthorizedAltitude : ValDistanceVerticalTypealtitudeReference : CodeVerticalReferenceTypecontrolledAirspace : CodeYesNoType
<<feature>>
0..10..1
isClearedFor
0..*
1
0..*
1
determines

20
Terminal Arrival AreaTerminal Arrival Area

21
Terminal Arrival AreaTerminal Arrival Area
SignificantPoint(from Navaids Points)
<<choice>>
TerminalArrivalArea
arrivalAreaType : codeTypeTAAouterBufferWidth : valDistlateralBufferWidth : valDist
<<feature>>
1+IAF 1
usedForAngle
1 +IF1
usedForDistance

22
Terminal Arrival AreaTerminal Arrival Area
•fromAngle = 083
•toAngle = 173
•Innerdistance = 0
•outerDistance = 18
•lowerLimit = 3200
InstrumentApproachProcedure(f rom 1 - Approach)
<<feature>>
SignificantPoint(f rom Nav aids Points)
<<choice>>
TerminalArrivalArea
arrivalAreaType : CodeTAATypeouterBufferWidth : ValDistanceTypelateralBufferWidth : ValDistanceType
<<feature>>
10..* 10..* supplies
1+IAF 1
isUsedForAngle
1 +IF1
isUsedForDistance
CircleSector
arcDirection : CodeArcDirectionTypefromAngle : ValBearingTypetoAngle : ValBearingTypeangleType : CodeBearingTypeangleDirectionReference : CodeDirectionReferenceTypeinnerDistance : ValDistanceTypeouterDistance : ValDistanceTypeupperLimit : ValDistanceVerticalTypeupperLimitReference : CodeVerticalReferenceTypelowerLimit : ValDistanceVerticalTypelowerLimitReference : CodeVerticalReferenceType
(f rom Shared)
<<object>>
Surface(f rom Geometry )
<<object>>1
+Buffer
1
projects
TerminalArrivalAreaSector
flyByCode : CodeYesNoTypeprocedureTurnRequired : CodeYesNoTypealtitudeDescription : CodeCrossingType
<<object>>
1..*1..*
isDefin...
11isDescribedBy
0..1+Extent
0..1
shows
Obstruction
requiredClearance : ValDistanceTypeminimumAltitude : ValDistanceVerticalTypesurfacePenetration : CodeYesNoTypeobstacleBearing : ValBearingTypeobstacleDistance : ValDistanceTypeslopePenetration : ValAngleTypecontroll ing : CodeYesNoType
(f rom Surf ace Assessment)
<<object>>
0..*0..*
isResolvedBy
InstrumentApproachProcedure(f rom 1 - Approach)
<<feature>>
SignificantPoint(f rom Nav aids Points)
<<choice>>
TerminalArrivalArea
arrivalAreaType : CodeTAATypeouterBufferWidth : ValDistanceTypelateralBufferWidth : ValDistanceType
<<feature>>
10..* 10..* supplies
1+IAF 1
isUsedForAngle
1 +IF1
isUsedForDistance
CircleSector
arcDirection : CodeArcDirectionTypefromAngle : ValBearingTypetoAngle : ValBearingTypeangleType : CodeBearingTypeangleDirectionReference : CodeDirectionReferenceTypeinnerDistance : ValDistanceTypeouterDistance : ValDistanceTypeupperLimit : ValDistanceVerticalTypeupperLimitReference : CodeVerticalReferenceTypelowerLimit : ValDistanceVerticalTypelowerLimitReference : CodeVerticalReferenceType
(f rom Shared)
<<object>>
Surface(f rom Geometry )
<<object>>1
+Buffer
1
projects
TerminalArrivalAreaSector
flyByCode : CodeYesNoTypeprocedureTurnRequired : CodeYesNoTypealtitudeDescription : CodeCrossingType
<<object>>
1..*1..*
isDefin...
11isDescribedBy
0..1+Extent
0..1
shows
Obstruction
requiredClearance : ValDistanceTypeminimumAltitude : ValDistanceVerticalTypesurfacePenetration : CodeYesNoTypeobstacleBearing : ValBearingTypeobstacleDistance : ValDistanceTypeslopePenetration : ValAngleTypecontroll ing : CodeYesNoType
(f rom Surf ace Assessment)
<<object>>
0..*0..*
isResolvedBy

23
MSA/ESAMSA/ESA
InstrumentApproachProcedure(from 1 - Approach)
<<feature>>
SignificantPoint(from Navaids Points)
<<choice>>
SafeAlti tudeArea
safeAreaType : codeSafeAlti tudeType
<<feature>>
10..2 10..2
protects
1
1
1
1
basedOn
CircleSector
arcDirection : codeArcDirectionfromAngle : valAngleBrgtoAngle : valAngleBrgangleType : codeTypeAngleBrgangleDirectionReference : codeDirRefinnerDistance : valDistouterDistance : valDistupperLimit : valDistVerupperLimitReference : codeDistVerlowerLimit : valDistVerlowerLimitReference : codeDistVer
(from Shared)
<<object>>
Surface
horizontalAccuracy : valDist...
(from Geometry)
<<object>>
MSASector
bufferWidth : valDist
<<object>>0..*0..*
definedBy
11
isDefinedBy
1
+Extent
1isPortrayedBy
AltitudeAdjustment
alti tudeAdjustmentType : codeTypeAltitudeAdjprimaryAlternateMinimum : codeYesNoalti tudeAdjustment : valDistVerlocalRemoteCode : codeYesNo
(from Surface Assessment)
<<object>>Obstruction
requiredClearance : valDistminimumAltitude : valDistVersurfacePenetration : codeYesNo...obstacleBearing : valAngleBrgobstacleDistance : valDistslopePenetration : valAnglecontroll ing : codeYesNo
(from Surface Assessment)
<<object>>
0..*0..*
isResolvedBy
0..*0..*
hasApplied

24
Circling CirclingThe boundaries of any sector in which visual maneuvering (circling) is prohibited;
Timetable
workingHours : codeTypeTimetable...
(from Time Management)
<<object>>
CircleSector
arcDirection : codeArcDirectionfromAngle : valAngleBrgtoAngle : valAngleBrgangleType : codeTypeAngleBrgangleDirectionReference : codeDirRef...innerDistance : valDistouterDistance : valDistupperLimit : valDistVerupperLimitReference : codeDistVerlowerLimit : valDistVerlowerLimitReference : codeDistVer
(from Shared)
<<object>>
Minima(from 6 - Minima)
<<object>>
RunwayDirection(from Runway)
<<feature>>
Circl ingRestriction<<object>>
0..10..1
isEffective0..10..1
isDescribedBy
InstrumentApproachProcedure(from 1 - Approach)
<<feature>>
ApproachCondition
finalApproachPath : codeMinimaFinalApproachPath
(from 1 - Approach)
<<object>>
0..10..1
indicates
0..*0..*
appliesTo
0..*0..*
isAppliedTo
Surface
horizontalAccuracy : valDist...
(from Geometry)
<<object>>
0..10..1
isDepictedBy
AircraftCharacteristics
type : codeTypeAcftengine : codeTypeAcftEnginenumberEngine : codeAcftEngineNotypeAircraftICAO : codeIcaoAircraftType...aircraftLandingCategory : codeCatAcft
(from Shared)
<<object>>
0..*0..*approvedFor
Circl ingArea<<feature>>
1
0..*
1
0..*usedOn
0..*0..*
has
0..10..1
i il l istratedBy
11
isEvalautedFor

25
MinimumsMinimums
Service
type : codeTypeSerclass : codeSourceSerradarAssisted : codeYesNo...
(from Service)
<<feature>>
EquipmentUnavailableAdjustmentColumn
guidanceEquipment : codeApproachTypelandingSystemLights : codeYesNoequipmentRVR : codeYesNovisibi l ityAdjustment : valDistVer_approachLightingInoperative : codeYesNo
<<object>>
EquipmentUnavailableAdjustments
type : codeEquipUnavailableTypedescription : txtRmk_approachLightingInoperative : codeYesNo
<<object>>
0..*0..*
contain
Minima
alti tude : valDistVeralti tudeCode : codeMinimumAlti tudealti tudeReference : codeDistVerheight : valDistVermil itaryHeight : valDistVerradioHeight : valDistVerheightCode : codeMinimumHeightheightReference : codeDistVervisibi l ity : valDistmil itaryVisibil i ty : valDistVermandatoryRVR : codeYesNoremoteAltimeterMinima : codeYesNo
<<object>>
0..*0..*
adjustedBy
RunwayDirection(from Runway)
<<feature>>
ServiceOnInstrumentApproachProcedure
remoteFlag : codeYesNoprimaryFlag : codeYesNo
(from Service)
<<feature>>
ApproachCondition
finalApproachPath : codeMinimaFinalApproachPath
(from 1 - Approach)
<<object>>
0..10..1
indicates
0..*0..*
appliesTo
0..1+altimeter
0..1
identifies

26
Obstacle Assessment AssociationsObstacle Assessment Associations
RouteSegment(from Routes)
<<feature>>
CirclingArea(from 5 - Circling)
<<feature>>SegmentLeg(from 4 - Segment Leg)
<<feature>>
HoldingAssessment<<feature>>
ApproachCondition(from 1 - Approach)
<<object>>
0..*0..*
has
NavaidEquipment(from Navaids Points)
<<feature>>
ObstacleAssessmentArea
type : CodeObstacleAssessmentSurfaceTypesectionNumber : NoNumberTypeslope : decimalassessedAltitude : ValDistanceVerticalTypeslopeLowerAltitude : ValDistanceVerticalType
<<object>>
0..10..1
isEvaluatedWith0..*0..*
isEvaluatedBy
0..*0..*
isEvaluatedBy
0..*0..*isEvaluateBy0..*0..*
isEvaluatedBy
0..*0..*
isEvaluatedBy

27
Obstacle AssessmentsObstacle Assessments
Curve(f rom Geometry )
<<object>>
AircraftCharacteristic
type : CodeAircraftTypeengine : CodeAircraftEngineTypenumberEngine : CodeAircraftEngineNumberTypetypeAircraftICAO : CodeAircraftICAOTypeaircraftLandingCategory : CodeAircraftCategoryTypemaxWingSpan : ValDistanceTypemaxWeight : ValWeightTypemaxPassengers : NoNumberType
(f rom Shared)
<<object>>
Surface(f rom Geometry )
<<object>>
AltitudeAdjustment
altitudeAdjustmentType : CodeAltitudeAdjustmentTypeprimaryAlternateMinimum : CodeYesNoTypealtitudeAdjustment : ValDistanceVerticalTypelocalRemoteCode : CodeYesNoType
<<object>>
ObstacleAssessmentArea
type : CodeObstacleAssessmentSurfaceTypesectionNumber : NoNumberTypeslope : decimalassessedAltitude : ValDistanceVerticalTypeslopeLowerAltitude : ValDistanceVerticalType
<<object>>
0..10..1
startsWith
0..*0..*
isEvaluatedFor11
hasExtent
Airspace(f rom Airspace)
<<feature>>
Obstruction
requiredClearance : ValDistanceTypeminimumAltitude : ValDistanceVerticalTypesurfacePenetration : CodeYesNoTypeobstacleBearing : ValBearingTypeobstacleDistance : ValDistanceTypeslopePenetration : ValAngleTypecontrolling : CodeYesNoType
<<object>>
0..*0..*
hasApplied
1..*1..*
isResolvedBy
VerticalStructure(f rom Obstacle)
<<feature>>
ObstructionType<<choice>>
0..1+obstruction
0..1
11
refersTo
0..1+obstruction 0..1

28
Approach Procedures
SummaryApproach Procedures
Summary
• Approach at a high level• Significant Points and Reference• Transition and Segments• Holding (three types) and how they relate to a
segment• Unplanned Holding• Terminal Arrival Areas• Minimum Safe/Sector Altitude / Emergency Safe
Altitudes• Circling• Minimums• Obstacle Assessment
• Approach at a high level• Significant Points and Reference• Transition and Segments• Holding (three types) and how they relate to a
segment• Unplanned Holding• Terminal Arrival Areas• Minimum Safe/Sector Altitude / Emergency Safe
Altitudes• Circling• Minimums• Obstacle Assessment

29
Questions
![A Language Independent Approach for Recognizing Textual … · 2009. 7. 16. · 1 Introduction Recognizing textual entailment RTE1 [3] is the task of deciding, given two text fragments,](https://img.pdfslide.us/doc/110x75/5fc2de557ec6300e4b092394/a-language-independent-approach-for-recognizing-textual-2009-7-16-1-introduction.jpg)