Embed Size (px)
Citation preview

1
Algorithms for Port of Entry Inspection for WMDs
Fred S. RobertsDIMACS Center,Rutgers University

2
Port of Entry Inspection Algorithms
•Goal: Find ways to intercept illicit nuclear materials and weapons
destined for the U.S. via the maritime transportation system
•Currently inspecting only small % of containers arriving at ports
•Even inspecting 8% of containers in Port of NY/NJ might bring international trade to a halt (Larrabbee 2002)

3
Port of Entry Inspection Algorithms•Aim: Develop decision support algorithms that will help us to “optimally” intercept illicit materials and weapons subject to limits on delays, manpower, and equipment
•Find inspection schemes that minimize total “cost” including “cost” of false positives and false negatives
Mobile Vacis: truck-mounted gamma ray imaging system

4
Sequential Decision Making Problem•Stream of containers arrives at a port•The Decision Maker’s Problem:
•Which to inspect?•Which inspections next based on previous results?
•Approach: –“decision logics”–combinatorial optimization methods–Builds on ideas of Stroud and Saeger at Los AlamosNational Laboratory–Need for new models– and methods

5
Sequential Diagnosis Problem•Such sequential diagnosis problems arise in many areas:
–Communication networks (testing connectivity, paging cellular customers, sequencing tasks, …)–Manufacturing (testing machines, fault diagnosis, routing customer service calls, …)–Artificial intelligence/CS (optimal derivation strategies in knowledge bases, best-value satisficing search, coding decision trees, …)–Medicine (diagnosing patients, sequencing treatments, …)

6
Sequential Decision Making Problem•Containers arriving to be classified into categories.•Simple case: 0 = “ok”, 1 = “suspicious”
•Inspection scheme: specifies which inspections are to be made based on previous observations

7
Sequential Decision Making Problem
•Containers have attributes, each in a number of states
•Sample attributes:–Levels of certain kinds of chemicals or biological materials–Whether or not there are items of a certain kind in the cargo list–Whether cargo was picked up in a certain port

8
Sequential Decision Making Problem
•Currently used attributes:–Does ship’s manifest set off an “alarm”?–What is the neutron or Gamma emission count? Is it above threshold?–Does a radiograph image come up positive?–Does an induced fission test come up positive?
Gamma ray detector

9
Sequential Decision Making Problem
•We can imagine many other attributes•This project is concerned with general algorithmic approaches.•We seek a methodology not tied to today’s technology.•Detectors are evolving quickly.

10
Sequential Decision Making Problem
•Simplest Case: Attributes are in state 0 or 1
•Then: Container is a binary string like 011001
•So: Classification is a decision function F that assigns each binary string to a category.
011001 F(011001)
If attributes 2, 3, and 6 are present, assign container to category F(011001).

11
Sequential Decision Making Problem
•If there are two categories, 0 and 1, decision function F is a boolean function.
Example: F(000) = F(111) = 1, F(abc) = 0 otherwise
This classifies a container as positive iff it has none of the attributes or all of them.
1 =

12
Sequential Decision Making Problem
•Given a container, test its attributes until know enough to calculate the value of F.
•An inspection scheme tells us in which order to test the attributes to minimize cost.
•Even this simplified problem is hard computationally.

13
Sequential Decision Making Problem•This assumes F is known.•Simplifying assumption: Attributes are independent.•At any point we stop inspecting and output the value of F based on outcomes of inspections so far.•Complications: May be precedence relations in the components (e.g., can’t test attribute a4 before testing a6. •Or: cost may depend on attributes tested before.•F may depend on variables that cannot be directly tested or for which tests are too costly.

14
Sequential Decision Making Problem
•Such problems are hard computationally.•There are many possible boolean functions F.•Even if F is fixed, problem of finding a good classification scheme (to be defined precisely below) is NP-complete. •Several classes of functions F allow for efficient inspection schemes:
–k-out-of-n systems–Certain series-parallel systems–Read-once systems–“regular” systems–Horn systems

15
Sensors and Inspection Lanes•n types of sensors measure presence or absence of the n attributes. •Many copies of each sensor.•Complication: different characteristics of sensors.•Entities come for inspection.•Which sensor of a given type to use?•Think of inspection lanes and queues.•Besides efficient inspection schemes, could decrease costs by:
–Buying more sensors–Change allocation of containers to sensor lanes.

16
Binary Decision Tree Approach•Sensors measure presence/absence of attributes.
•Binary Decision Tree: –Nodes are sensors or categories (0 or 1)–Two arcs exit from each sensor node, labeled left and right.–Take the right arc when sensor says the attribute is present, left arc otherwise

17
Binary Decision Tree Approach
•Reach category 1 from the root only through the path a0 to a1 to 1.
•Container is classified in category 1 iff it has both attributes a0 and a1 .
•Corresponding boolean function F(11) = 1, F(10) = F(01) = F(00) = 0.
Figure 1

18
Binary Decision Tree Approach•Reach category 1 from the root by:a0 L to a1 R a2 R 1 ora0 R a2 R1
•Container classified in category 1 iff it hasa1 and a2 and not a0 or a0 and a2 and possibly a1.
•Corresponding boolean function F(111) = F(101) = F(011) = 1, F(abc) = 0 otherwise.
Figure 2

19
Binary Decision Tree Approach•This binary decision tree corresponds to the same boolean function
F(111) = F(101) = F(011) = 1, F(abc) = 0 otherwise.
However, it has one less observation node ai. So, it is more efficient if all observations are equally costly and equally likely.
Figure 3

20
Binary Decision Tree Approach•Even if the boolean function F is fixed, the problem of finding the “optimal” binary decision tree for it is very hard (NP-complete).
•For small n = number of attributes, can try to solve it by brute force enumeration.
•Even for n = 5, not practical. (n = 4 at Port of Long Beach-Los Angeles)
Port of Long Beach

21
Binary Decision Tree ApproachPromising Approaches:
•Heuristic algorithms, approximations to optimal.•Special assumptions about the boolean function F. •Example: For “monotone” boolean functions, integer programming formulations give promising heuristics.•Stroud and Saeger enumerate all “complete,” monotone boolean functions and calculate the least expensive corresponding binary decision trees.

22
Binary Decision Tree ApproachMonotone Boolean Functions:
•Given two strings x1x2…xn, y1y2…yn
•Suppose that xi yi for all i implies that F(x1x2…xn) F(y1,y2…yn).•Then we say that F is monotone. •Then 11…1 has highest probability of being in category 1.

23
Binary Decision Tree Approach
Incomplete Boolean Functions:
•Boolean function F is incomplete if F can be calculated by finding at most n-1 attributes and knowing the value of the input string on those attributes•Example: F(111) = F(110) = F(101) = F(100) = 1, F(000) = F(001) = F(010) = F(011) = 0. •F(abc) is determined without knowing b (or c).•F is incomplete.

24
Binary Decision Tree Approach
Complete, Monotone Boolean Functions:
•Stroud and Saeger: algorithm for enumerating binary decision trees implementing complete, monotone boolean functions. •Feasible to implement up to n = 4.•n = 2:
–There are 6 monotone boolean functions.–Only 2 of them are complete, monotone–There are 4 binary decision trees for calculating these 2 complete, monotone boolean functions.

25
Binary Decision Tree Approach
Complete, Monotone Boolean Functions:
•n = 3:–9 complete, monotone boolean functions.–60 distinct binary trees for calculating them
•n = 4:–114 complete, monotone boolean functions.–11,808 distinct binary decision trees for calculating them.

26
Binary Decision Tree Approach
Complete, Monotone Boolean Functions:
•n = 5:–6894 complete, monotone boolean functions–263,515,920 corresponding binary decision trees.
•Combinatorial explosion! •Need alternative approaches; enumeration not feasible!

27
Cost Functions
•Above analysis: Only uses number of sensors•Using a sensor has a cost:
–Unit cost of inspecting one item with it–Fixed cost of purchasing and deploying it–Delay cost from queuing up at the sensor station
•Preliminary problem: disregard fixed and delay costs. Minimize unit costs.

28
Cost Functions
•Simplification so far: Disregard characteristics of population of entities being inspected. •Only count number of observation (attribute) nodes in the tree.
•Unit Cost Complication: How many nodes of the decision tree are actually visited during average container’s inspection? Depends on “distribution” of containers. In our early models, will depend on probability of sensor errors and probability of bomb in a container.

29
Cost Functions: Delay Costs•Tradeoff between fixed costs and delay costs: Add more sensors cuts down on delays.•Stochastic process of containers arriving•Distribution of delay times for inspections•Use queuing theory to find average delay times under different models

30
Cost Functions
•Cost of false positive: Cost of additional tests.
–If it means opening the container, it’s very expensive.
•Cost of false negative: –Complex issue.–What is cost of a bomb going off in Manhattan?

31
The Brute Force Approach
•The cost of each binary decision tree corresponding to a complete, monotone boolean function is calculated.•The optimum tree is selected.•Optimum depends on assumptions about sensor errors, costs of false positive and false negative outcomes, and unit, fixed, and delay costs for each sensor.

32
Cost Functions: Sensor Errors•One Approach to False Positives/Negatives:Assume there can be Sensor Errors•Simplest model: assume that all sensors checking for attribute ai have same fixed probability of saying ai is 0 if in fact it is 1, and similarly saying it is 1 if in fact it is 0.•More sophisticated analysis later describes a model for determining probabilities of sensor errors. •Notation: X = state of nature (bomb or no bomb)
Y = outcome (of sensor or entire inspection process).

33
Probability of Error for The Entire TreeState of nature is zero (X = 0), absence of a bomb State of nature is one (X = 1), presence
of a bomb
Probability of false positive (P(Y=1|X=0))
for this tree is given by
Probability of false negative(P(Y=0|X=1))
for this tree is given by
A
B
C
0
1
0 1
A
B
C
0
1
0 1
P(Y=1|X=0) = P(YA=1|X=0) * P(YB=1|X=0) + P(YA=1|X=0) *P(YB=0|X=0)* P(YC=1|X=0)
P(Y=0|X=1) = P(YA=0|X=1) + P(YA=1|X=1) *P(YB=0|X=1)*P(YC=0|X=1)

34
Cost Function used for Evaluating the Decision Trees.
CTot = CFalsePositive *PFalsePositive + CFalseNegative *PFalseNegative + Cutil
The error probability of the entire tree is computed from the error probabilities of the individual sensors.
CFalsePositive is the cost of false positive (Type I error)CFalseNegative is the cost of false negative (Type II error)PFalsePositive is the probability of a false positive occurringPFalseNegative is the probability of a false negative occurringCutil is the cost of utilization of the tree.

35
Cost Function used for Evaluating the Decision Trees.
Cutil is the cost of utilization of the tree.
Simplest assumption: Cutil is the expected sum of unit costs associated with the tree. Count unit cost of each sensor each time it is used. Use P(X = 1) and probability of errors at each type of sensor to calculate expected value.
Later: models for distribution of attributes of containers and more sophisticated analysis of expected cost of utilizing the tree, bringing in delay costs.

36
Stroud Saeger Experiments• Stroud-Saeger ranked all trees formedfrom 3 or 4 sensors A, B, C and D according to increasing tree costs. • Used cost function defined above. • Values used in their experiments:
– CA = .25; P(YA=1|X=1) = .90; P(YA=1|X=0) = .10;– CB = 10; P(YC=1|X=1) = .99; P(YB=1|X=0) = .01;– CC = 30; P(YD=1|X=1) = .999; P(YC=1|X=0) = .001;– CD = 1; P(YD=1|X=1) = .95; P(YD=1|X=0) = .05;
– Here, Ci = cost of utilization of sensor i. • Also fixed were: CFalseNegative, CFalsePositive, P(X=1)

37
Stroud Saeger Experiments: Our Sensitivity Analysis
• We have explored sensitivity of the Stroud-Saeger conclusions to variations in values of these three parameters.
• We estimated high and low values for these parameters.• We chose one of the values from the interval of values
and then explored the highest ranked tree as the other two were chosen at random in the interval of values. 10,000 experiments for each pair of fixed values.
• We looked for the variation in the top-ranked tree and how the top-rank related to choice of parameter values.
• Very surprising results.

38
Stroud Saeger Experiments: Our Sensitivity Analysis
– CFalseNegative was varied between 25 million and 10 billion dollars• Low and high estimates of direct and indirect costs
incurred due to a false negative.
– CFalsePositive was varied between $180 and $720
• Cost incurred due to false positive
(4 men * (3 -6 hrs) * (15 – 30 $/hr)– P(X=1) was varied between 1/10,000,000 and
1/100,000

39
Stroud Saeger Experiments: Sensitivity Analysis
• First set of experiments: 3 attributes or types of sensors, A, B, C.
• Extensive computer experimentation.

40
Frequency of Top-ranked Trees when CFalseNegative and CFalsePositive are Varied
• 10,000 randomized experiments (randomly selected values of CFalseNegative and CFalsePositive from the specified range of values) for the median value of P(X=1).
• The above graph has frequency counts of the number of experiments when a particular tree was ranked first or second, or third and so on.
• Only three trees (7, 55 and 1) ever came first. 6 trees came second, 10 came third, 13 came fourth.
0 10 20 30 40 50 600
1000
2000
3000
4000
5000
6000
7000
Tree no.
Fre
qu
en
cy
1st2nd3rd4th5th

41
• 10,000 randomized experiments for the median value of CFalsePositive. • Only 2 trees (7 and 55) ever came first. 4 trees came second. 7 trees came third.
10 and 13 trees came 4th and 5th respectively.
Frequency of Top-ranked Trees when CFalseNegative and P(X=1) are Varied
0 10 20 30 40 50 600
1000
2000
3000
4000
5000
6000
7000
8000
Tree no.
Fre
qu
en
cy
1st2nd3rd4th5th

42
• 10,000 randomized experiments for the median value of CFalseNegative. • Only 3 trees (7, 55 and 1) ever came first. 6 trees came second. 10 trees
came third. 13 and 16 trees came 4th and 5th respectively.
Frequency of Top-ranked Trees when P(X=1) and CFalsePositive are Varied
0 10 20 30 40 50 600
1000
2000
3000
4000
5000
6000
7000
Fre
qu
en
cy
Tree no.
1st2nd3rd4th5th

43
Most Frequent Tree Groups Attaining the Top Three Ranks.
• Trees 7, 9 and 10
A
B
C
0
1
0 1
B
A
C
A
1
0 1
0 0
B
A
A
C
1
0 1
0 0
All the three decision trees have been generated from the same boolean expression 00000111 representing F(000)F(001)…F(111)Both Tree 9 and Tree 10 are ranked second and third more than 99% of the times when Tree 7 is ranked first.

44
Most Frequent Tree Groups Attaining the Top Three Ranks
• Trees 55, 57 and 58
A
1
C
B
1
0 1
B
1
C
A
1
0 1
B
1
A
C
1
0 1
The boolean expression for these three decision trees is 01111111Tree ranked 57 is second 96% of the times and tree 58 is third 79 % of the times when tree 55 is ranked first.

45
Most Frequent Tree Groups Attaining the Top Three Ranks
• Trees 1, 3, and 2
A
B
C
0
0
0 1
A
C
B
0
0
0 1
B
A
C
0
0
0 1
The boolean expression for these three decision trees is 00000001Tree 3 is ranked second 98% of times and tree 2 is ranked third 80 % of the times when tree 1 is ranked first.

46
Values of CFalseNegative and CFalsePositive when Tree 7 was Ranked First
• This is a graph of CFalsePositive against CFalseNegative values obtained from the randomized experiments. The black dots represent points at which tree 7 scored first rank.

47
Values of CFalseNegative and CFalsePositive when Tree 55 was Ranked First
• Tree 55 fills up the lower area in the range of CFalseNegative and CFalsePositive values.

48
Values of CFalseNegative and CFalsePositive when Tree 1 was Ranked First
• Tree 1 fills up the major area in the range of CFalseNegative and CFalsePositive.
0 1 2 3 4 5 6 7 8 9 10
x 109
0
100
200
300
400
500
600
700
800
900
CFalseNegative
CFalsePositive

49
Values of CFalseNegative and CFalsePositive for the Three First Ranked Trees
• Trees 7, 55 and 1 fill up the entire area in the range of CFalseNegative and CFalsePositive among themselves.

50
Values of CTot, CFalseNegative and CFalsePositive for First Ranked Trees
• This graph shows total costs for trees 7, 55 and 1 in the respective regions in which they were ranked first.
• Each tree’s total cost is a hyperplane which cuts other hyperplanes as it gains and then loses first rank.

51
Values of CTot, CFalseNegative and CFalsePositive for Trees 1, 7 and 55 (Even When They Were
not Ranked First).
This graph shows the extended CTot hyperplanes for trees 7, 55 and 1 for all regions.

52
Values of CFalseNegative and P(X=1) when Tree 7 was Ranked First
• Tree 7 again fills up the major area in the range of CFalseNegative and P(X=1).

53
Values of CFalseNegative and P(X=1) when Tree 55 was Ranked First
• Tree 55 fills up the rest of the area in the range of CFalseNegative and P(X=1).

54
Values of CFalseNegative and P(X=1) for First Ranked Trees
• Together trees 7 and 55 fill up the entire region of CFalseNegative and P(X=1).

55
Variations of CTot, CFalseNegative and P(X=1) for First Ranked Trees
• This graph has CTot on the 3rd axis for trees 7 and 55 in the respective regions in which they were most optimal.
• Each tree’s total cost is a conic surface.

56
Values of CFalsePositive and P(X=1) When Tree 7 was Ranked First
• Tree 7 fills up the major area in the range of CFalsePositive and P(X=1).

57
Values of CFalsePositive and P(X=1) when Tree 55 was Ranked First
• Tree 55 fills up the lower area in the range of CFalsePositive and P(X=1).

58
Values of CFalsePositive and P(X=1) when Tree 1 was Ranked First
• Tree 1 fills up the major area in the range of CFalsePositive and P(X=1).
0 100 200 300 400 500 600 700 800 9000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1x 10
-5
CFalsePositive
P(X=1)

59
Values of CFalsePositive and P(X=1) for First Ranked Trees
• Trees 7, 55 and 1 fill up the entire area in the range of CFalsePositive and P(X=1) among themselves.

60
Values of CTot, CFalsePositive and P(X=1) for First Ranked Trees
• This graph shows total costs for trees 7, 55 and 1 in the respective regions in which they were most optimal.
• Each tree’s total cost is a hyperplane which cuts other hyperplanes as it gains and then loses first rank.

61
Modeling Sensor Errors•One Approach to Sensor Errors: Modeling Sensor Operation
•Threshold Model:–Sensors have different discriminating power–Many use counts (e.g., Gamma radiation counts)–See if count exceeds threshold–If so, say attribute is present.

62
Modeling Sensor ErrorsThreshold Model:
•Sensor i has discriminating power Ki, threshold Ti
•Attribute present if counts exceed Ti
•Calculate fraction of objects in each category whose readings exceed T•Seek threshold values that minimize all costs: inspection, false positive/negative•Assume readings of category 0 containers follow a Gaussian distribution and similarly category 1 containers•Simulation approach

63
Probability of Error for Individual Sensors
• For ith sensor, the type 1 (P(Yi=1|X=0)) and type 2 (P(Yi=0|X=1)) errors are modeled using Gaussian distributions. – State of nature X=0 represents absence of a bomb.– State of nature X=1 represents presence of a bomb. i represents the outcome (count) of sensor i. – Σi is variance of the distributions
Ki
P(i|X=1)P(i|X=0)
Ti
Characteristics of a typical sensor i

64
Modeling Sensor ErrorsThe probability of false positive for the ith sensor is computed as:
P(Yi=1|X=0) = 0.5 erfc[Ti/√2]The probability of detection for the ith sensor is computed as:
P(Yi=1|X=1) = 0.5 erfc[(Ti-Ki)/(Σ√2)]
erfc = complementary error function erfc(x) = (1/2,x2)/sqrt()
The following experiments have been done using sensors A, B, C and using:
KA = 4.37; ΣA = 1KB = 2.9; ΣB = 1KC = 4.6; ΣC = 1
We then varied the individual sensor thresholds TA, TB and TC from -4.0 to +4.0 in steps of 0.4. These values were chosen since they gave us an “ROC curve” (see later for the individual sensors over a complete range P(Yi=1|X=0) and P(Yi=1|X=1)

65
Frequency of First Ranked Trees for Variations in Sensor Thresholds
• 68,921 experiments were conducted, as each Ti was varied through its entire range. • The above graph has frequency counts of the number of experiments when a particular
tree was ranked first. There are 15 such trees. Tree 37 had the highest frequency of attaining rank one.
0 10 20 30 40 50 600
2000
4000
6000
8000
10000
12000
14000
16000
18000
Tree no.
Fre
qu
en
cy

66
Stroud Saeger Experiments: Our Sensitivity Analysis: 4 Sensors
• Second set of computer experiments: 4 attributes or types of sensors, A, B, C, D.
• Same values as before.• Experiment 1: Fix values of two of CFalseNegative,
CFalsePositive, P(X=1) and vary the third. • Experiment 2: Fix a value of one of CFalseNegative,
CFalsePositive, P(X=1) and vary the other two through their interval of possible values. Do 10,000 experiments each time.
• Look for the variation in the highest ranked tree.

67
Stroud Saeger Experiments: Our Sensitivity Analysis: 4 Sensors
• Experiment 1: Fix values of two of CFalseNegative, CFalsePositive, P(X=1) and vary the third.

68
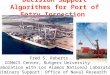
CTot vs CFalseNegative for Ranked 1 Trees (Trees 11485(9651) and 10129(349))
Only two trees ever were ranked first, and one, tree 11485, was ranked first in 9651 out of 10,000 runs.

69
CTot vs CFalsePositive for Ranked 1 Trees (Tree no. 11485 (10000))
One tree, number 11485, was ranked first every time.

70
CTot vs P(X=1) for Ranked 1 Trees (Tree no. 11485(8372), 10129(488), 11521(1056))
Three trees dominated first place. Trees 10201(60), 10225(17) and 10153(7) also achieved first rank but with relatively low frequency.

71
Tree Structure and corresponding Boolean Expressions
1
a
b b
d c
d 1
c
d 1
100 1
0 1
Tree number 11485Boolean Expr: 0101011101111111
1
a
b b
c
d 1
c
d 1
100 1
c
0 d
10
Tree number 10129Boolean Expr: 0001011101111111

72
Stroud Saeger Experiments: Our Sensitivity Analysis: 4 Sensors
• Experiment 2: Fix the values of one of CFalseNegative, CFalsePositive, P(X=1) and vary the others.

73
Frequency of First Ranked Trees when Two Parameters (CFalseNegative and CFalsePositive) were Varied Keeping P(X=1) Constant at Randomly Selected
Values.
0 2000 4000 6000 8000 10000 120000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2x 10
5 Trees coming first -9541 10129 10153 10201 11485 11521
Tree number
Fre
quency
10,000 randomized experiments with randomly selected values of P(X=1) The experiments were repeated for 20 different randomly selected values of P(X=1)

74
Frequency of First Ranked Trees when Two Parameters (CFalseNegative and P(X=1)) were Varied
Keeping CFalsePositive Constant at Randomly Selected Values.
0 2000 4000 6000 8000 10000 120000
2
4
6
8
10
12
14x 10
4
Tree number
Fre
quency
Trees coming first -505 4695 5105 5129 7353 9541 10129 10153 10201 10225 11485 11521
10,000 randomized experiments with randomly selected values of CFalsePositive
The experiments were repeated for 20 different randomly selected values of CFalsePositive

75
Frequency of First Ranked Trees when Two Parameters (P(X=1) and CFalsePositive) were Varied
Keeping CFalseNegative Constant at Randomly Selected Values.
0.95 1 1.05 1.1 1.15 1.2
x 104
0
5
10
15x 10
4
Tree number
Fre
quency
Trees coming first -9541 10129 10153 10201 10225 11485 11521
10,000 randomized experiments with randomly selected values of CFalseNegative
The experiments were repeated for 20 different randomly selected values of CFalseNegative

76
Variation of CTot wrt CFalseNegative and CFalsePositive, for Tree Ranked First (Tree nos. 11485 and
10129)
CTot = CFalsePositive *P(X=0)*P(Y=1|X=0) + CFalseNegative *P(X=1)*P(Y=0|X=1) + Cutil
11485
10129

77
Variation of CTot wrt CFalseNegative and P(X=1), for Tree Ranked First(Tree no.
11485(8121),10129(728) and 11521(984))
CTot = CFalsePositive *P(X=0)*P(Y=1|X=0) + CFalseNegative *P(X=1)*P(Y=0|X=1) + Cutil
Trees 505, 5105, 5129, 9541, 10153, 10201 and 10225 also attained rank 1, but with very low frequency (<100).
10129
11485

78
Variation of CTot wrt CFalsePositive and P(X=1), for Tree Ranked First(Tree no.
11485(7162),10129(1690) and 11521(851))
CTot = CFalsePositive *P(X=0)*P(Y=1|X=0) + CFalseNegative *P(X=1)*P(Y=0|X=1) + Cutil
Trees 10153, 10201 and 10225 also attained first rank, 80, 195 and 22 times respectively.
1012911485

79
Receiver Operating Characteristic (ROC) Curve
• The ROC curve is the plot of the probability of correct detection (PD) vs. the probability of false positive (PF).
• The ROC curve is used to select an operating point, which provides the tradeoff between the PD and PF
• Each sensor has a ROC curve and the combination of the sensors into a decision tree has a composite ROC curve.
• The parameter which is varied to get different operating points on the ROC curve is the sensor threshold and a combination of thresholds for the decision tree.
• Equal Error Rate (EER) is the operating point on the ROC curve where PF = 1 – PD
• We can use ROC curves to identify optimal thresholds for sensors.
P(i|X=1)P(i|X=0)
Ti
Ki
PD
PF
Operating Point
1
0 1
EER
ROC Curve

80
Receiver Operating Characteristic (ROC) Curve
• We seek operating characteristics of sensors that place us in the upper left hand corner of the ROC curve.
• Here, PF is small and PD is large.
P(i|X=1)P(i|X=0)
Ti
Ki
PD
PF
Operating Point
1
0 1
EER
ROC Curve

81
Performance of Sensors Against that of Tree 37 (Most Frequent Tree Attaining Rank 1)
• The black, blue and red dotted lines represent performance characteristics (ROC curve) of sensors A, B and C.
• The green dots represent the performance characteristics (P(Y=1|X=0), P(Y=1|X=1)) of the tree over all combinations of sensor thresholds (Ti).

82
Performance of Sensors Against that of Tree 37
• This zoomed-in figure of the ROC curve displays the region of high detection probabilities and low false positive probabilities.
• Points lying on the diagonal line are the Equal Error Rates for this tree and the sensors. The tree achieves equal error rates of 0.0027 while sensors A, B and C have EERs of 0.0145, 0.0738, 0.0107.

83
Best Possible ROC Curve for Tree 37
• Assuming performance probabilities (P(Y=1|X=1) and P(Y=1|X=0)) to be monotonically related (in the sense that P(Y=1|X=1) can be called a monotonic function of P(Y=1|X=0)), we can find an ROC curve for the tree consisting of the set containing maximum P(Y=1|X=1) value corresponding to given P(Y=1|X=0) value.
• The blue dots represent such an ROC curve, the “best” ROC curve for tree 37.

84
Conclusions from Sensitivity Analysis
• Considerable lack of sensitivity to modification in parameters for trees using 3 or 4 sensors.
• Very few optimal trees.
• Very few boolean functions arise among optimal trees.

85
Some Complications•More complicated cost models; bringing in costs of delays•More than two values of an attribute
(present, absent, present with probability > 75%, absent with probability at least 75%) (ok, not ok, ok with probability > 99%, ok with probability between 95% and 99%)
•Inferring the boolean function from observations (partially defined boolean functions)

86
Some Research Challenges•Explain why conclusions are so insensitive to variation in parameter values.•Explore the structure of the optimal trees and compare the different optimal trees.•Develop less brute force methods for finding optimal trees that might work if there are more than 4 attributes.•Develop methods for approximating the optimal tree.
Pallet vacis

87
Closing Remark•Recall that the “cost” of inspection includes the cost of failure, including failure to foil a terrorist plot.•There are many ways to lower the total “cost” of inspection:
Use more efficient orders of inspection.Find ways to inspect more containers.Find ways to cut down on delays at inspection lanes.

88
Research Team• Saket Anand, Rutgers, ECE graduate student• Endre Boros, Rutgers, Operations Research• Elsayed Elsayed, Rutgers, Ind. & Systems Engineering• Liliya Fedzhora, Rutgers, Operations Res. grad. student• Paul Kantor, Rutgers, Schl. of Infor. & Library Studies• Abdullah Karaman, Rutgers Ind. & Syst. Eng. grad. student• Alex Kogan, Rutgers, Business School• Paul Lioy, Rutgers/UMDNJ, Environmental and Occupational Health and
Sciences Institute• David Madigan, Rutgers, Statistics• Richard Mammone, Rutgers, Center for Advanced Information Processing• S. Muthukrishnan, Rutgers, Computer Science• Saumitr Pathek, Rutgers ECE graduate student• Richard Picard, Los Alamos, Statistical Sciences Group• Fred Roberts, Rutgers, DIMACS Center• Kevin Saeger, Los Alamos, Homeland Security• Phillip Stroud, Los Alamos, Systems Engineering and Integration Group• Hao Zhang, Rutgers Ind. & Systems Eng., graduate student

89
Collaborators on Sensitivity Analysis:• Saket Anand• David Madigan• Richard Mammone• Saumitr Pathak
Research Support: • Office of Naval Research• National Science Foundation
Los Alamos National Laboratory:• Rick Picard• Kevin Saeger• Phil Stroud