Embed Size (px)
Citation preview
1
Abstract Reasoning for Multiagent Coordination and
Planning
Bradley J. Clement

2
Overview• Problem description• Summary of approach• Related work• Representations and supporting algorithms
– CHiPs– Metric resources– Summary information
• Coordination algorithm– Complexity analyses– Decomposition search techniques– Applications and experiments
• Planning– Concurrent hierarchical refinement and local search planners– Scheduling complexity– Mars rovers experiments
• Conclusion

3
Manufacturing Example
Production, Inventory, andFacility Managers
bin2 bin3 bin4bin1
M1 M2
B C
dock
A tool
D
E
transport2transport1

7
• Managers must coordinate or risk failure.• Managers develop plans independently.• Managers need sound and complete coordination
algorithm.• Managers may need to make coordination decisions
quickly.• Managers must reason about concurrent
action to use resources efficiently.
• Managers may need plans that handle unexpected events.
Problem Characteristics
bin2 bin3 bin4bin1
M1 M2
B C
dock
A tool
D
E
transport2transport1

8
Problem
• Coordination (or planning) should be sound & complete.
• Agents should not coordinate (reason about subgoals) where there are no conflicts.
• Agents should act as soon as possible.• Agents should accomplish goals efficiently.
– Agents should act concurrently.– Agents should maximize utility.
• Agents should be able to handle unexpected events.
Find preferable elaborations or modifications to a group of agents’ plans that achieve their goals while striking a balance among the following objectives:

9
Overview• Problem description• Summary of approach• Related work• Representations and supporting algorithms
– CHiPs– Metric resources– Summary information
• Coordination algorithm– Complexity analyses– Decomposition search techniques– Applications and experiments
• Planning– Concurrent hierarchical refinement and local search planners– Scheduling complexity– Mars rovers experiments
• Conclusion

10
Approach• Reason about plans at abstract levels to reduce the
information needed to make efficient coordination and planning decisions– concurrent hierarchical plan representation– summarize constraints of abstract tasks from those of tasks in their
decompositions– use this summary information to reason about interactions of abstract
plans
• Construct sound and complete coordination & planning algorithms
• Explore techniques and heuristics for decomposition search based on summary information
• Analyze complexity of abstract reasoning• Evaluate in different domains
11
Approach
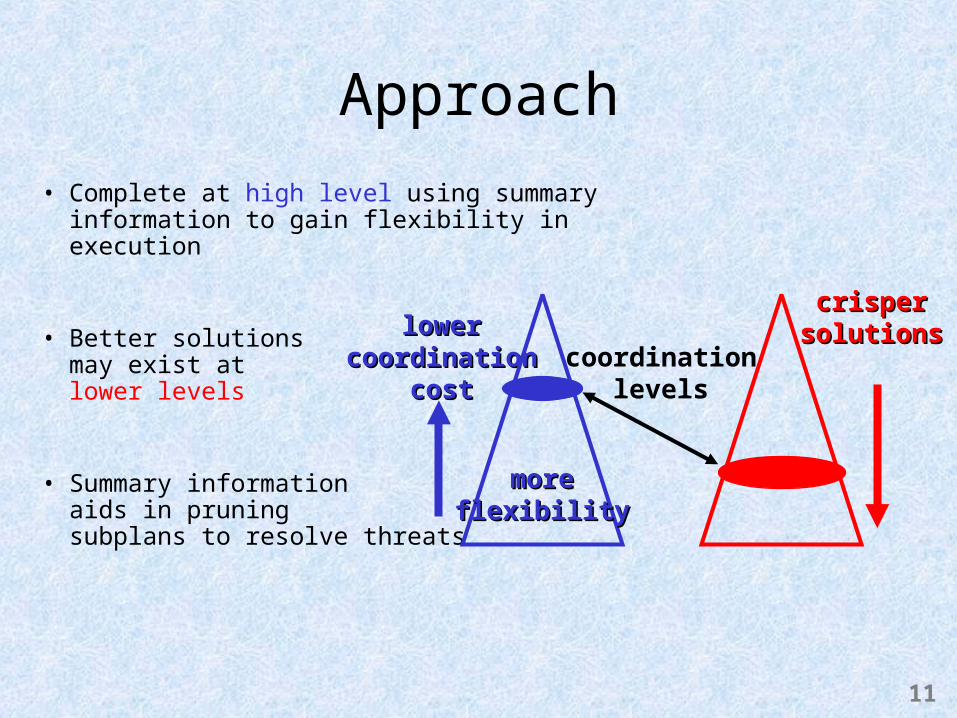
• Complete at high level using summary information to gain flexibility in execution
• Better solutions may exist at lower levels
• Summary information aids in pruning subplans to resolve threats
coordinationlevels
crispercrispersolutionssolutionslowerlower
coordinationcoordinationcostcost
moremoreflexibilityflexibility
12
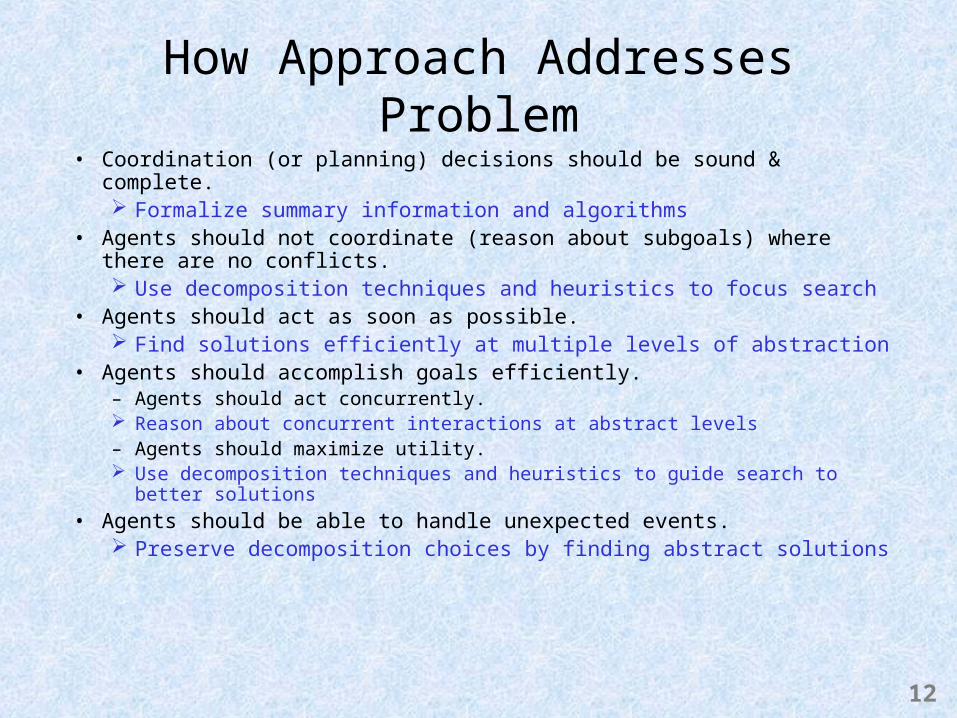
How Approach Addresses Problem• Coordination (or planning) decisions should be sound & complete.
Formalize summary information and algorithms• Agents should not coordinate (reason about subgoals) where there are no
conflicts. Use decomposition techniques and heuristics to focus search
• Agents should act as soon as possible. Find solutions efficiently at multiple levels of abstraction
• Agents should accomplish goals efficiently.– Agents should act concurrently. Reason about concurrent interactions at abstract levels– Agents should maximize utility. Use decomposition techniques and heuristics to guide search to better
solutions
• Agents should be able to handle unexpected events. Preserve decomposition choices by finding abstract solutions

15
Approach - Limitations• Do not offer algorithms/protocols that determine
optimal balancing of problem objectives– do give mechanisms that enable tradeoffs
• Do not investigate alternative coordination/negotiation protocols– instead, identify who needs to coordinate, what needs
to be coordinated, and alternative settlements
• Planning language– Only grounded, propositional states formalized
• mention how uninstantiated variables are implemented
– Metric resource usage is instantaneous
18
Contributions• Algorithms for deriving and reasoning about
summary information• Sound and complete concurrent hierarchical
coordination & planning algorithms• Integration of summary information in a local search
planner• Search techniques and heuristics that efficiently
guide decomposition and prune the search space• Complexity analyses and experiments that show
where abstract reasoning exponentially reduces cost of computation and communication

19
Overview• Problem description• Summary of approach• Related work• Representations and supporting algorithms
– CHiPs– Metric resources– Summary information
• Coordination algorithm– Complexity analyses– Decomposition search techniques– Applications and experiments
• Planning– Concurrent hierarchical refinement and local search planners– Scheduling complexity– Mars rovers experiments
• Conclusion
20
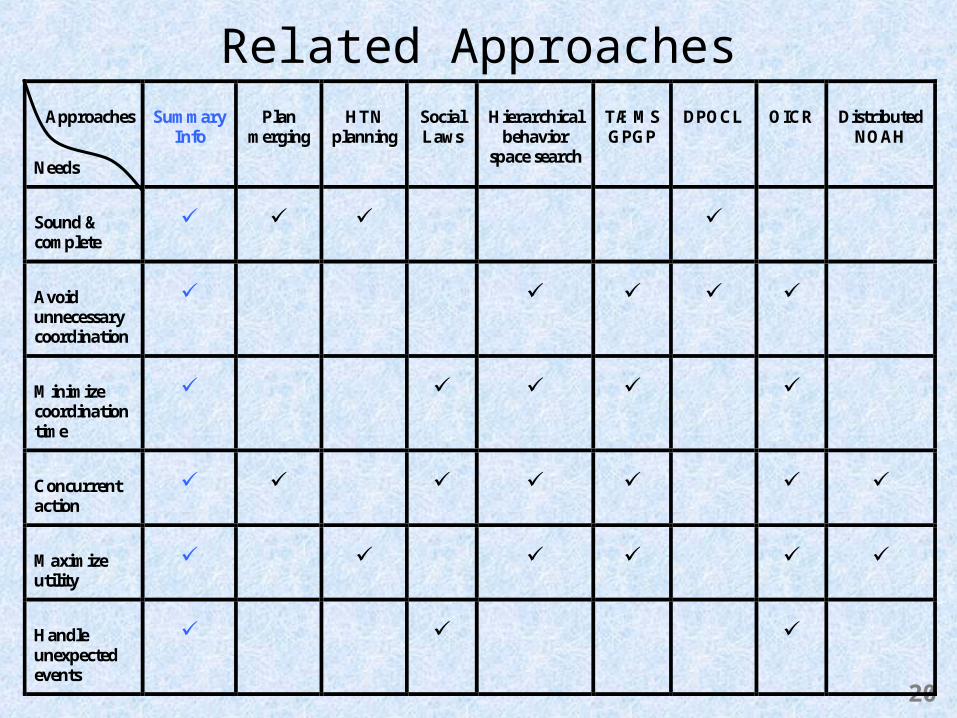
Related ApproachesApproaches
Needs
Summary Info
Plan merging
HTN planning
Social Laws
Hierarchical behavior
space search
TÆMS GPGP
DPOCL OICR Distributed NOAH
Sound & complete
Avoid unnecessary coordination
Minimize coordination time
Concurrent action
Maximize utility
Handle unexpected events

24
Overview• Problem description• Summary of approach• Related work• Representations and supporting algorithms
– CHiPs– Metric resources– Summary information
• Coordination algorithm– Complexity analyses– Decomposition search techniques– Applications and experiments
• Planning– Concurrent hierarchical refinement and local search planners– Scheduling complexity– Mars rovers experiments
• Conclusion

25
produce G
produce Gproduce Gon M1 on M2
build Gmove A&Bto M2
move A to M2 move B to M2
move Gto M2 build H
move Hto bin1
produce H
produce H from G
Concurrent Hierarchical Plans (CHiPs)
• pre, in, & postconditions - sets of literals for a set of propositions
• type - and, or, primitive• subplans - execute all for and, one for or; empty for
primitive• orderorder - conjunction of point or interval relations B - beforeB - before
BB
BB
BB BB
bin2 bin3 bin4bin1
M1 M2
B C
dock
A tool
D
E
transport2transport1

32
produce G
produce Gproduce Gon M1 on M2
build Gmove A&Bto M2
move A to M2 move B to M2
move Gto M2 build H
move Hto bin1
produce H
produce H from G
bin2 bin3 bin4bin1
M1 M2
B C
dock
A tool
D
E
transport2transport1
• existence: must, may• timing: always, sometimes, first, last• external preconditions• external postconditions
pre: available(A), available(M2)
pre: available(A), available(M2)
pre: available(A), available(M1)
pre: available(A), available(M1), available(M2)
Summary Conditions
pre: available(A)
pre: available(A)

36
Deriving Summary Conditions
• Can be run offline for a domain• Recursive algorithm bottoming out at primitives• Derived from those of immediate subplans• O(n2c2) for n non-primitive plans in hierarchy and
c conditions in each set of pre, in, and postconditions
• Properties of summary conditions are proven based on procedure
• Proven procedures for determining must/may - achieve/undo/clobber
37
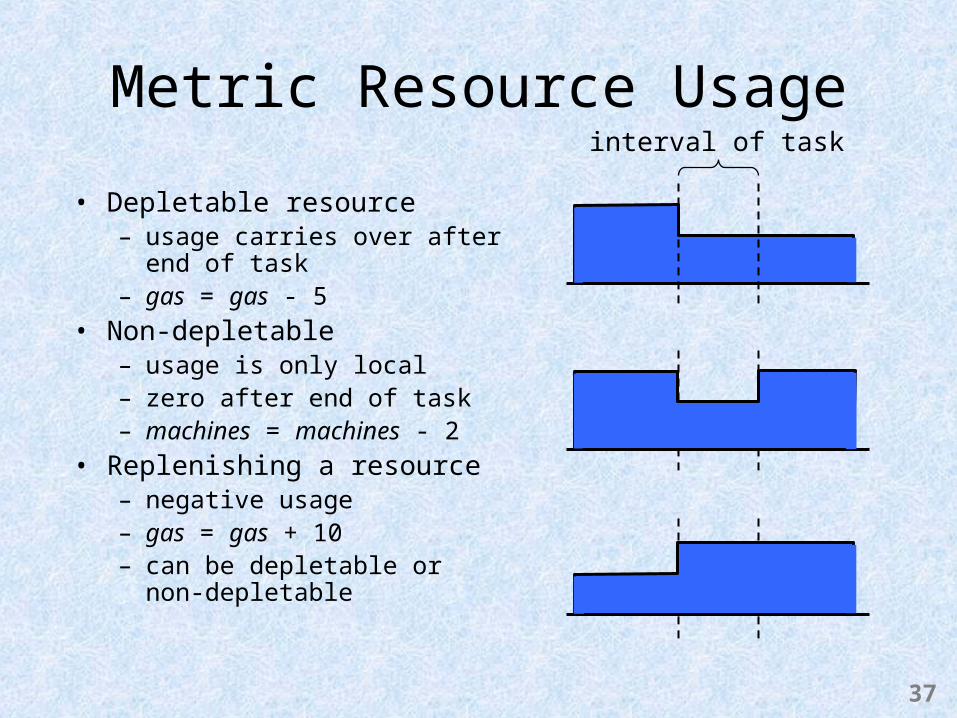
Metric Resource Usage
• Depletable resource– usage carries over after end of
task– gas = gas - 5
• Non-depletable– usage is only local– zero after end of task– machines = machines - 2
• Replenishing a resource– negative usage– gas = gas + 10– can be depletable or
non-depletable
interval of task

40
summarized resource usage
< local_min_range, local_max_range, persist_range >
• Captures uncertainty of decomposition choices and temporal uncertainty of partially ordered actions
• Can be used to determine if a resource usage may, must, or must not cause a conflict
Summarizing Resource Usage
0
40
30
-7
-20
2010
< [-20, -7],[30, 40],[10, 20] >

41
Resource Summarization Algorithm
• Can be run offline for a domain model• Run separately for each resource• Recursive from leaves up hierarchy• Summarizes parent from summarizations of
immediate children• Considers all legal orderings of children• Considers all subintervals where upper and lower
bounds of children’s resource usage may be reached• Exponential with number of immediate children, so
summarization is really constant for one resource and O(r) for r resources

46
Overview• Problem description• Summary of approach• Related work• Representations and supporting algorithms
– CHiPs– Metric resources– Summary information
• Coordination algorithm– Complexity analyses– Decomposition search techniques– Applications and experiments
• Planning– Concurrent hierarchical refinement and local search planners– Scheduling complexity– Mars rovers experiments
• Conclusion

47
Determining Temporal Relations• CanAnyWay({relations}, {psum, qsum}) - relations can
hold for any way p and q can be executed
• MightSomeWay({relations}, {psum, qsum}) - relations might hold for some way p and q can be executed
CanAnyWay({before}, {produce_H, maintenance})CanAnyWay({overlaps}, {produce_H, maintenance})
MightSomeWay({overlaps}, {produce_H, maintenance})
B - before
O - overlaps
bin2 bin3 bin4bin1
M1 M2
B C
dock
A tool
D
E
transport2transport1
produce H
maintenance

48
Concurrent Hierarchical Plan Coordination
• Agents individually derive summary information for their plan hierarchies
• Coordinator requests summary information for expansions of agents’ hierarchies from the top down
• After each expansion, try to resolve threats by adding ordering constraints
• Algorithm shown to be sound and complete

49
Search for Coordinated Plan
• search state– set of expanded plans – set of blocked subplans– set of temporal constraints
• search operators– expand– block– constrain
blocked
blocked
temporal constraints

56
• Number of plan steps per level grows exponentially down the hierarchy O(bi)
• In worst case, summary information for each plan grows exponentially up the hierarchy O(bd-ic)
• Number of orderings of plans grows exponentially down hierarchy O(bi!)
• Resolving threats is NP-complete (reduced from Hamiltonian Path)
• In worst case, search space reduced by O(kbd-bi).
• In best case, O(kbd-bib2(d-i)).
Easier to Coordinate at Higher Levels
b - branching factori - leveld - depthc - conditions per plan

59
Search Techniques
• Prune inconsistent global plans • Branch & bound - abstract solutions
help prune space where cost is higher• “Expand most threats first” (EMTF)
– expand subplan involved in most threats– focuses search on driving down to source of
conflict
• “Fewest threats first” (FTF)– search plan states with fewest threats first– or subplans involved in most threats are blocked
first

60
Evacuation Domain Experiments
• Compare different strategies of ordering search states and ordering expansions– FAF-FAF– DFS-ExCon– FTF-EMTF– FTF-ExCon
• 4 - 12 locations• 2 - 4 transports• no, partial, & complete overlap in locations
visited

66
Evacuation Domain Experiments
Summary information decomposition techniques outperform previous state-of-the-art by orders of magnitude
Search States Expanded
1
10
100
1000
10000
1 10 100 1000 10000
FTF-EMTF
DF
S-E
xCo
n

67
Evacuation Domain Experiments
Decomposition techniques using summary information dominate previous heuristics in finding optimal solutions– FTF especially effective compared to
random, DFS, and FAF– EMTF not especially more effective than
ExCon but finds solutions more regularly– Overall performance differs by orders of
magnitude

68
Communication in Manufacturing Domain
• Centralized coordinator• Measure delay with varying bandwidth and latency:
(n-2)l + s/bn = number of messagess = total size of messagesl = latencyb = bandwidth
bin2 bin3 bin4bin1
M1 M2
B C
dock
A tool
D
E
transport2transport1

74
Communication in Manufacturing Domain• Agents can minimize communication by sending summary
information at intermediate levels with a particular granularity.
• Sending all plan information at once can be exponentially more expensive: O(bd-i).
• Sending summary information one task at a time can cause exponentially greater latency: O(bi).
• However, if summary information does not collapse up the hierarchy, and coordination must occur at primitive levels, sending all at once is best.
• Domain modeler can perform similar experiment to determine appropriate granularity to send summary information.
75
Multi-Level Coordination Agent (MCA)
• Centrally coordinates plans of requesting agents in episodes
• Requests summary information as needed or summarizes given hierarchies
• Displays discovered solutions that are “better” or Pareto-optimal
• Sends synchronization and decomposition choice constraints to agents upon selection of a solution

W E
N
S
CapeVincent
CapeAmstado
Cac
a
KasoLagoon
Amisa
Jacal
Pra
Ankobra
Tana
Ofin
Afr
am
Daka
Black Caca
Kapowa
White C
aca
Mawli
LAKE CACA
Forces separated by Firestorm
AGADEZ
GAO
BinniBinni
Laki SafariPark
Gaoforces
AgadezForces
False Agadezforces
FIRESTORM
False Gaoforces

82
Multi-Level Coordination of Military Coalitions

83
Overview• Problem description• Summary of approach• Related work• Representations and supporting algorithms
– CHiPs– Metric resources– Summary information
• Coordination algorithm– Complexity analyses– Decomposition search techniques– Applications and experiments
• Planning– Concurrent hierarchical refinement and local search planners– Scheduling complexity– Mars rovers experiments
• Conclusion

84
Concurrent Hierarchical Refinement Planner
• Simple modification to coordination algorithm– discover whether potential internal conflicts exist during summarization– must expand any task with potential internal conflicts
• Derive summary information for hierarchy expanded to primitive level (iteratively expand for infinite recursion of methods)
• Expand hierarchy from the top down, selecting or blocking or decomposition choices
• After each expansion, try to resolve threats– add ordering constraints– check CAW and MSW
• Sound and complete• Same complexity benefits as coordination algorithm
86
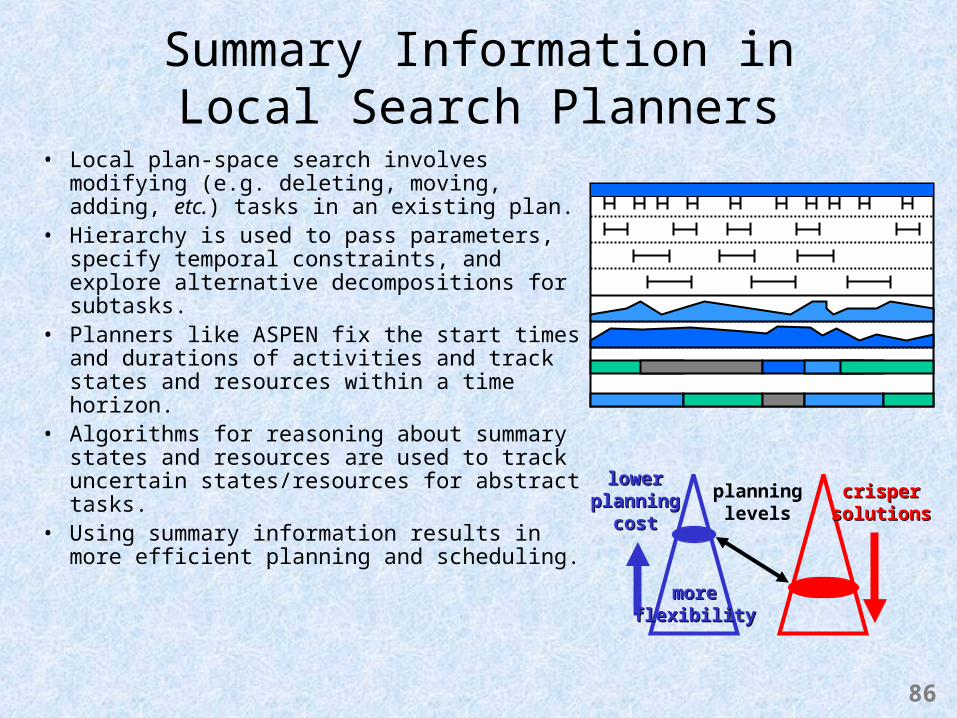
Summary Information in Local Search Planners
• Local plan-space search involves modifying (e.g. deleting, moving, adding, etc.) tasks in an existing plan.
• Hierarchy is used to pass parameters, specify temporal constraints, and explore alternative decompositions for subtasks.
• Planners like ASPEN fix the start times and durations of activities and track states and resources within a time horizon.
• Algorithms for reasoning about summary states and resources are used to track uncertain states/resources for abstract tasks.
• Using summary information results in more efficient planning and scheduling.
planninglevels
crispercrispersolutionssolutions
lowerlowerplanningplanning
costcost
moremoreflexibilityflexibility

90
Complexity Analyses: Local Search
• Moving an activity hierarchy is a factor of O(b2(d-i)) more complex at level d than i if summary information fully collapses up the hierarchy.
• If no information collapses, moving a hierarchy has the same complexity at all levels O(vnb2d).
• The number of potential temporal constraint conflicts is a factor of O(bd-i) greater at level d than i.
• Thus, reasoning at abstract levels can resolve conflicts exponentially faster.
. . .
level01
d1 2 n
branchingfactor b
c constraintsper hierarchy
vvariables
91
Decomposition Strategies• Level expansion
– repair conflicts at current level of abstraction until conflicts cannot be further resolved
– then decompose all activities to next level and begin repairing again
• Expand most threats first (EMTF)– instead of moving activity to resolve conflict,
decompose with some probability (decomposition rate)
– expands activities involved in greater numbers of conflicts (threats)
• FTF (fewest-threats-first) heuristic tests each decomposition choice and picks those with fewer conflicts with greater probability.
94
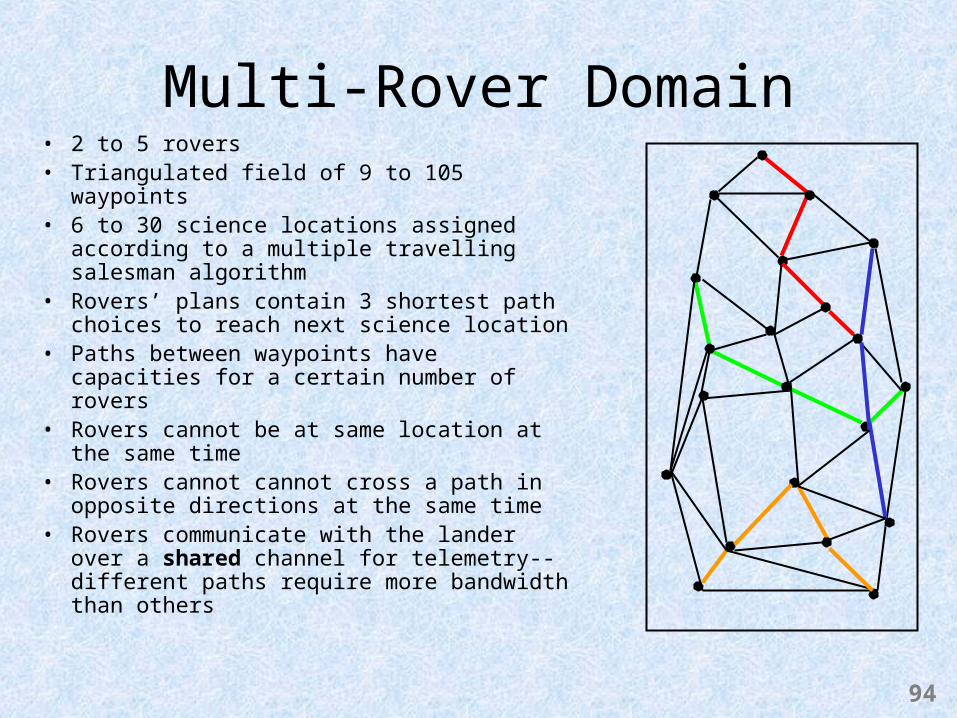
Multi-Rover Domain• 2 to 5 rovers• Triangulated field of 9 to 105 waypoints• 6 to 30 science locations assigned
according to a multiple travelling salesman algorithm
• Rovers’ plans contain 3 shortest path choices to reach next science location
• Paths between waypoints have capacities for a certain number of rovers
• Rovers cannot be at same location at the same time
• Rovers cannot cannot cross a path in opposite directions at the same time
• Rovers communicate with the lander over a shared channel for telemetry--different paths require more bandwidth than others
95
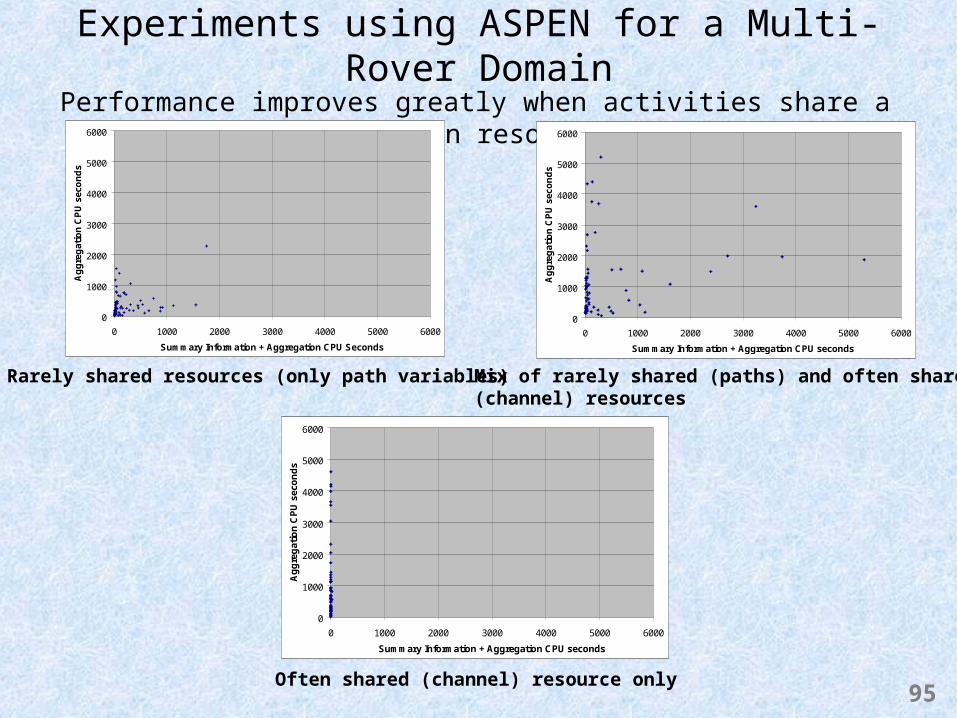
Experiments using ASPEN for a Multi-Rover Domain
Performance improves greatly when activities share a common resource.
0
1000
2000
3000
4000
5000
6000
0 1000 2000 3000 4000 5000 6000
Summary Information + Aggregation CPU Seconds
Ag
gre
gat
ion
CP
U s
eco
nd
s
0
1000
2000
3000
4000
5000
6000
0 1000 2000 3000 4000 5000 6000
Summary Information + Aggregation CPU seconds
Ag
gre
gat
ion
CP
U s
eco
nd
s
0
1000
2000
3000
4000
5000
6000
0 1000 2000 3000 4000 5000 6000
Summary Information + Aggregation CPU seconds
Ag
gre
gat
ion
CP
U s
eco
nd
s
Rarely shared resources (only path variables) Mix of rarely shared (paths) and often shared(channel) resources
Often shared (channel) resource only

99
Overview• Problem description• Summary of approach• Related work• Representations and supporting algorithms
– CHiPs– Metric resources– Summary information
• Coordination algorithm– Complexity analyses– Decomposition search techniques– Applications and experiments
• Planning– Concurrent hierarchical refinement and local search planners– Scheduling complexity– Mars rovers experiments
• Conclusion

100
Contributions
• Algorithms for deriving and reasoning about summary information for propositional state and metric resources– must/may assert, achieve, clobber, undo– CAW & MSW to determine whether abstract plans
are conflict free or unresolvable– toolbox of sound and complete algorithms for
constructing efficient coordination and planning algorithms

101
Contributions
• Coordination and planning algorithms– sound, complete concurrent hierarchical
coordination– sound, complete concurrent hierarchical
planner– iterative repair planner employing abstract
reasoning with summary information– evaluated in manufacturing, evacuation,
military operations, and Mars rovers domains

102
Contributions• Complexity analyses and experiments
– Finding solutions at abstract levels is exponentially less complex O(kbd-bi) in number of tasks for both refinement and local search.
– Finding abstract solutions is exponentially less complex when summarization collapses constraints O(b2(d-i)) for both refinement and local search.
– Experiments support the analyses in evacuation and Mars rovers domains.
– Communication delay can be reduced exponentially by• gradually sending summary information O(bd-i) and• sending at an appropriate granularity O(bi).
– Extension of work by Korf ’87 and Knoblock ‘91 showing how hierarchical coordination/planning can obtain exponential speedups when subgoals interact

103
Contributions
• Decomposition search techniques– EMTF, FTF (for refinement and local search)– Pruning of inconsistent and costlier search
space– Evaluation against prior heuristics showing
stronger ability to find optimal solutions at lower abstraction levels

104
• Applying summary information to other classes of coordination/planning– state-based search– complex resources– more expressive temporal models
• Summarizing other information– constraint hierarchies (in addition to task hierarchies)– reasoning about uncertainty and risk
• Coordination protocols based on summary information– organization and scaling of agent groups– BDI-based multiagent mental models
• Coordinating continuously• Interfacing deliberative and reactive coordination• Exploiting synergy while coordinating• Case-based coordination
Future Directions



















![[Clement Hal] Clement, Hal - Iceworld](https://img.pdfslide.us/doc/110x75/577cb1001a28aba7118b67ac/clement-hal-clement-hal-iceworld.jpg)








