Embed Size (px)
Citation preview
Chebyshev Estimator
Presented by: Orr Srour
References Yonina Eldar, Amir Beck and Marc Teboulle, "A
Minimax Chebyshev Estimator for Bounded Error Estimation" (2007), to appear in IEEE Trans. Signal Proc.
Amir Beck and Yonina C. Eldar, Regularization in Regression with Bounded Noise: A Chebyshev Center Approach, SIAM J. Matrix Anal. Appl. 29 (2), 606-625 (2007).
Jacob (Slava) Chernoi and Yonina C. Eldar, Extending the Chebyshev Center estimation Technique, TBA
Chebyshev Center - Agenda Introduction CC - Basic Formulation CC - Geometric Interpretation CC - So why not..? Relaxed Chebyshev Center (RCC)
Formulation of the problem Relation with the original CC Feasibility of the original CC Feasibility of the RCC CLS as a CC relaxation CLS vs. RCC Constraints formulation
Extended Chebyshev Center
Notations
y – boldface lowercase = vector yi - i’th component of the vector y A - boldface uppercase = matrix - hat = the estimated vector of x = A – B is PD, PSD
x̂, A B A B
The Problem
Estimate the deterministic parameter vector from observations with:
A – n x m model matrix w – perturbation vector.
mx R ny R
y Ax w
LS Solution
When nothing else is known, a common approach is to find the vector that minimizes the data error:
Known as “least squares”, this solution can be written explicitly:
x̂
2Ax y
* 1 *ˆ ( )LSx A A A y
(Assuming A has a full column rank)
But…
In practical situations A is often ill-conditioned -> poor LS results
Regularized LS
Assume we have some simple prior information regarding the parameter vector x.
Then we can use the regularized least squares (RLS):
2 2ar inˆ :g m n
RLS x
x Ax y LxF
But…
But what if we have some prior information regarding the noise vector as well…?
What if we have some more complicated information regarding the parameter vector x?
Assumptions
From now on we assume that the noise is norm-bounded :
And that x lies in a set defined by:
2w
C
: ( ) 2 0,1
0, ,
i i
mi i i
f d i k
d
T Ti ix x x Q x g x
Q g
C
R R(hence C is the intersection of k ellipsoids)
Assumptions
The feasible parameter set of x is then given by:
(hence Q is compact) Q is assumed to have non-empty
interior
2: , x x y AxQ C
Constrained Least Squares (CLS)
Given the prior knowledge , a popular estimation strategy is:
- Minimization of the data error over C- But: the noise constraint is unused…
More importantly, it doesn’t necessarily lead to small estimation error:
x C
2
CLS arg minˆ xx y AxC
ˆ x x
Chebyshev Center
The goal: estimator with small estimation error
Suggested method: minimize the worst-case error over all feasible vectors
2
ˆmin max ˆ x x x xQ
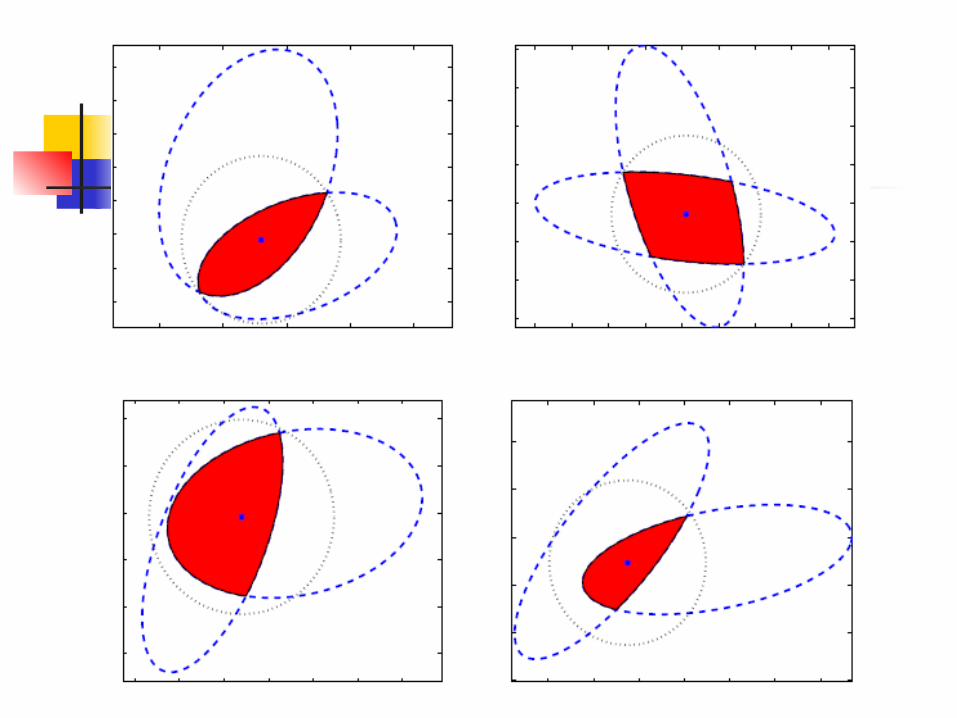
Chebyshev Center – Geometric Interpretation
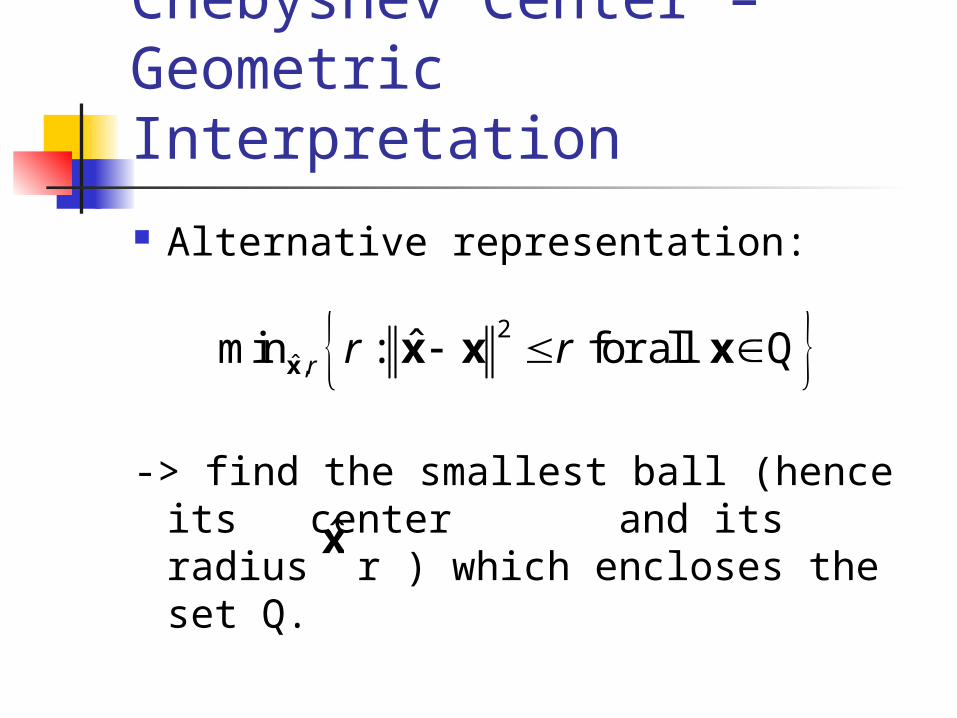
Alternative representation:
-> find the smallest ball (hence its center and its radius r ) which encloses the set Q.
2
ˆ , ˆ: for all min r r r x x x x Q
x̂
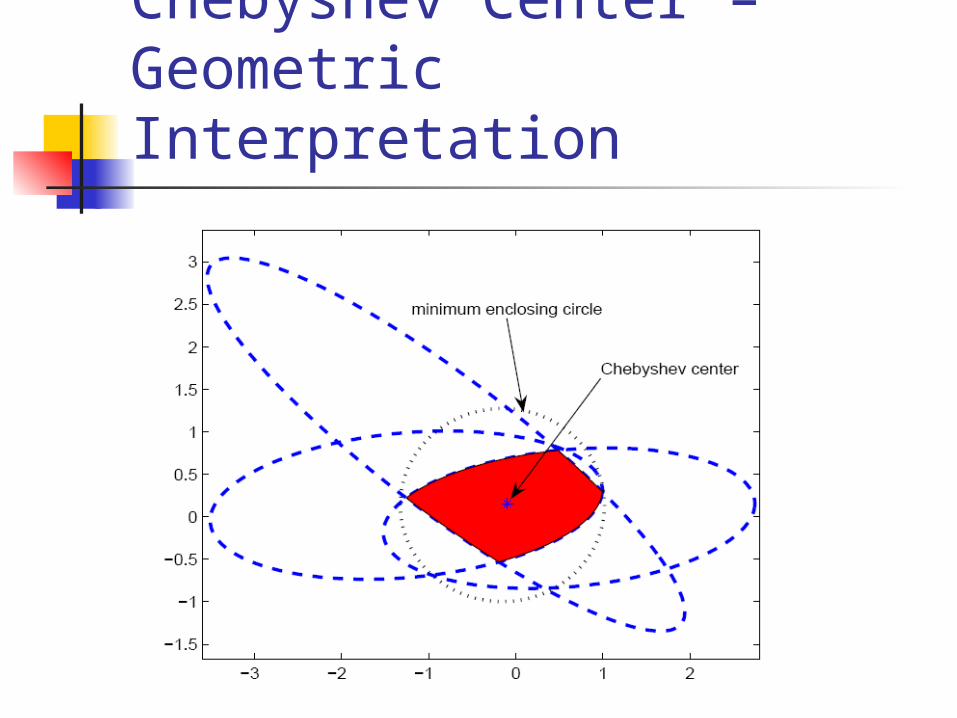
Chebyshev Center – Geometric Interpretation
Chebyshev Center
This problem is more commonly known as finding “Chebyshev’s Center”.
Pafnuty Lvovich Chebyshev
16.5.1821 – 08.12.1894
Chebyshev Center – The problem The inner maximization is non-
convex
Computing CC is a hard optimization problem
Can be solved efficiently over the complex domain for intersection of 2 ellipsoids
Relaxed Chebyshev Center (RCC)
Let us consider the inner maximization first:
and:
2ˆ : ) 0,0
( ) 2 0,
max (
0
i
i i
f i k
f d i k
x
T Ti i
x x x
x x Q x g x
2
0 0 0, ,d T TQ A A g A y y
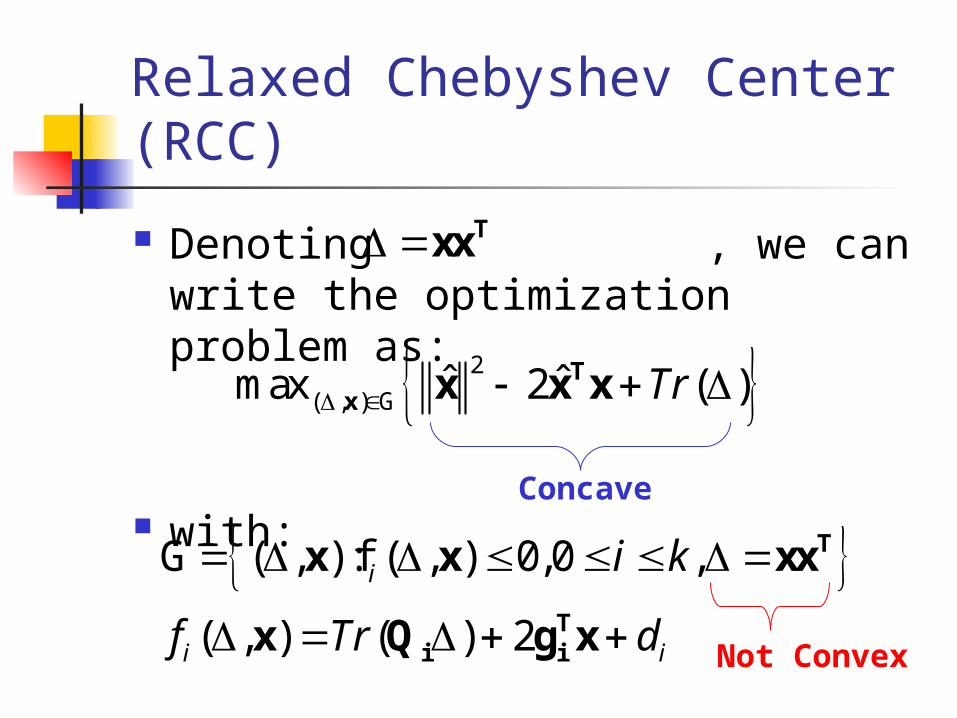
Relaxed Chebyshev Center (RCC)
Denoting , we can write the optimization problem as:
with:
Txx
2
( , ) ˆ ˆ2 ( )max Tr Tx x x xG
( , ) : ( , ) 0,0 ,
( , ) (
f
) 2
i
i i
i k
f Tr d
T
Ti i
x x xx
x Q g x
G
Concave
Not Convex
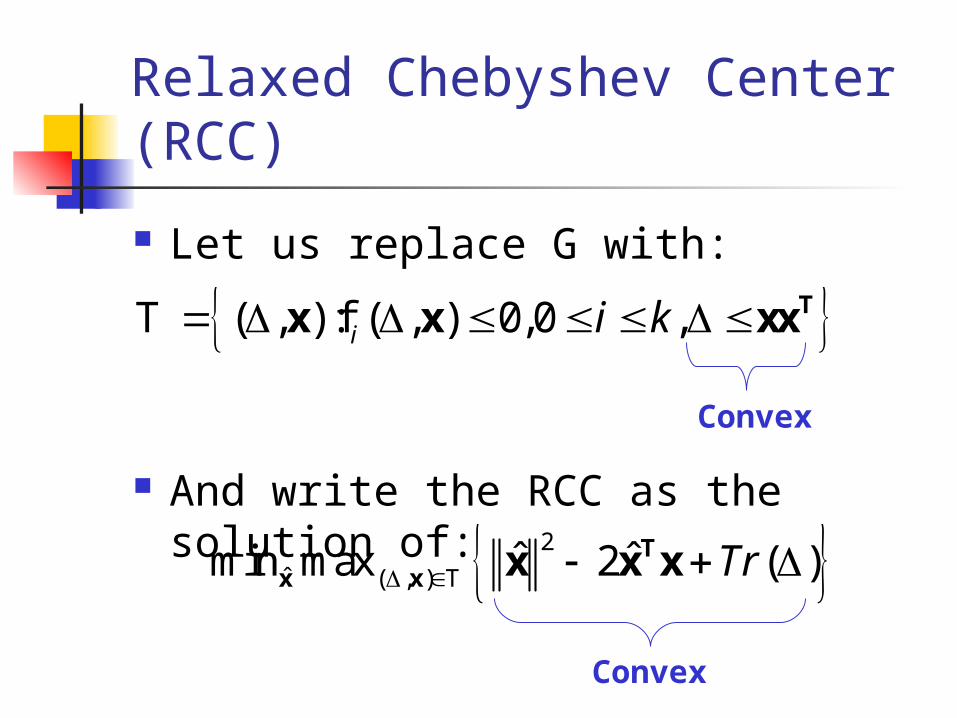
Relaxed Chebyshev Center (RCC)
Let us replace G with:
And write the RCC as the solution of:
( , ) : ( , ) 0,0f ,i i k Tx x xxT
Convex
2
ˆ ( , ) ˆmin x ˆ2 ( )ma Tr Tx x x x xT
Convex
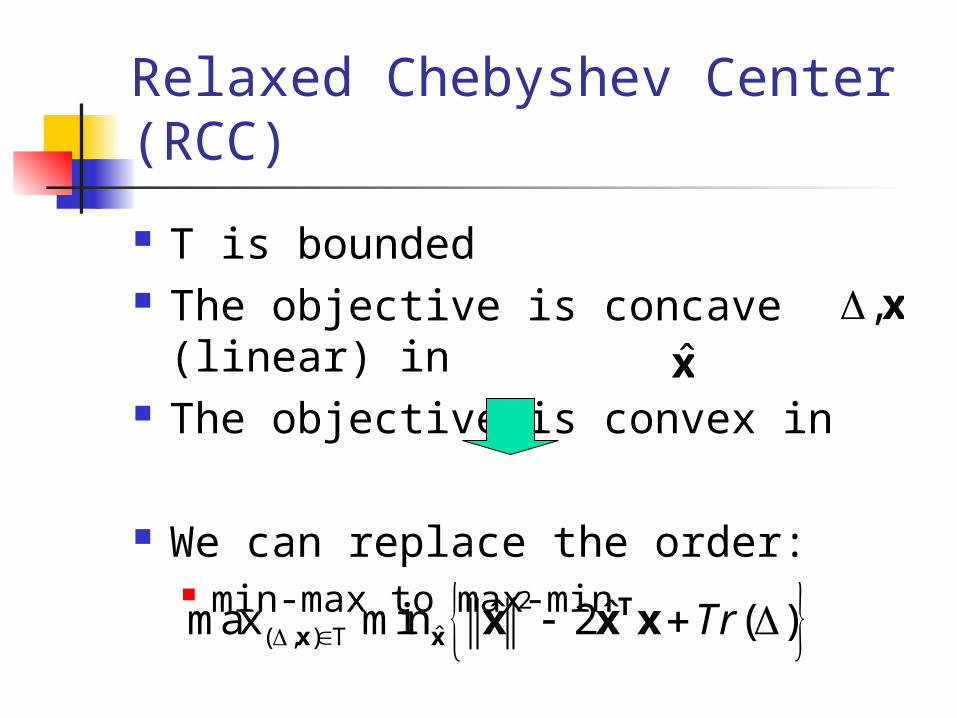
Relaxed Chebyshev Center (RCC)
T is bounded The objective is concave (linear) in The objective is convex in
We can replace the order: min-max to max-min
, xx̂
2
ˆ( , ) ˆmax ˆ2 (in )m Tr Tx x x x xT
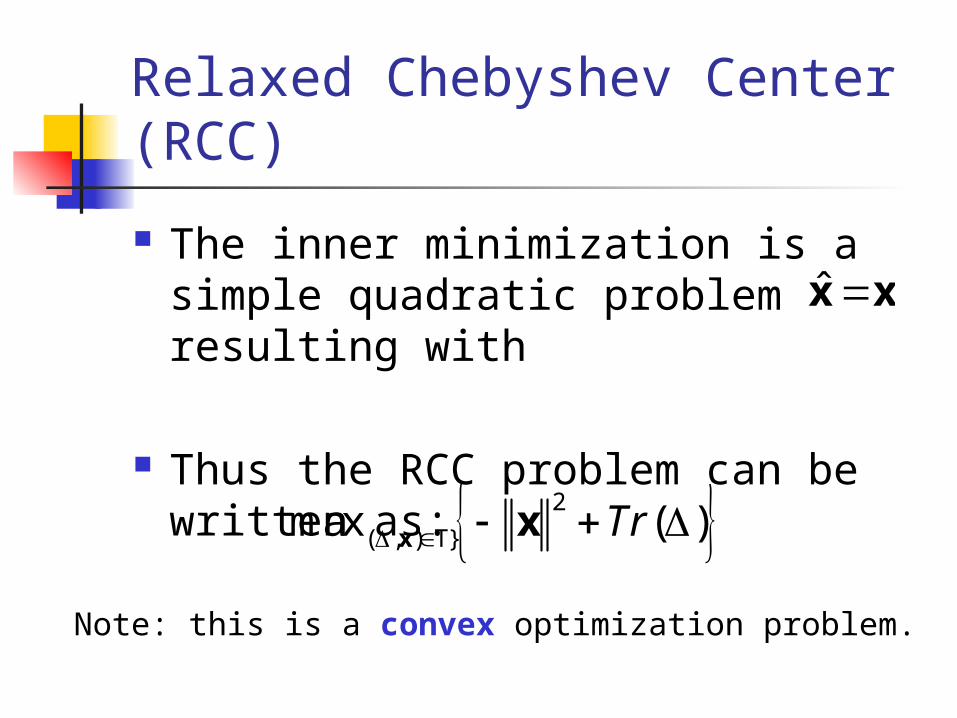
Relaxed Chebyshev Center (RCC)
The inner minimization is a simple quadratic problem resulting with
Thus the RCC problem can be written as:
ˆ x x
2
( , )max ( )Tr x xT}
Note: this is a convex optimization problem.
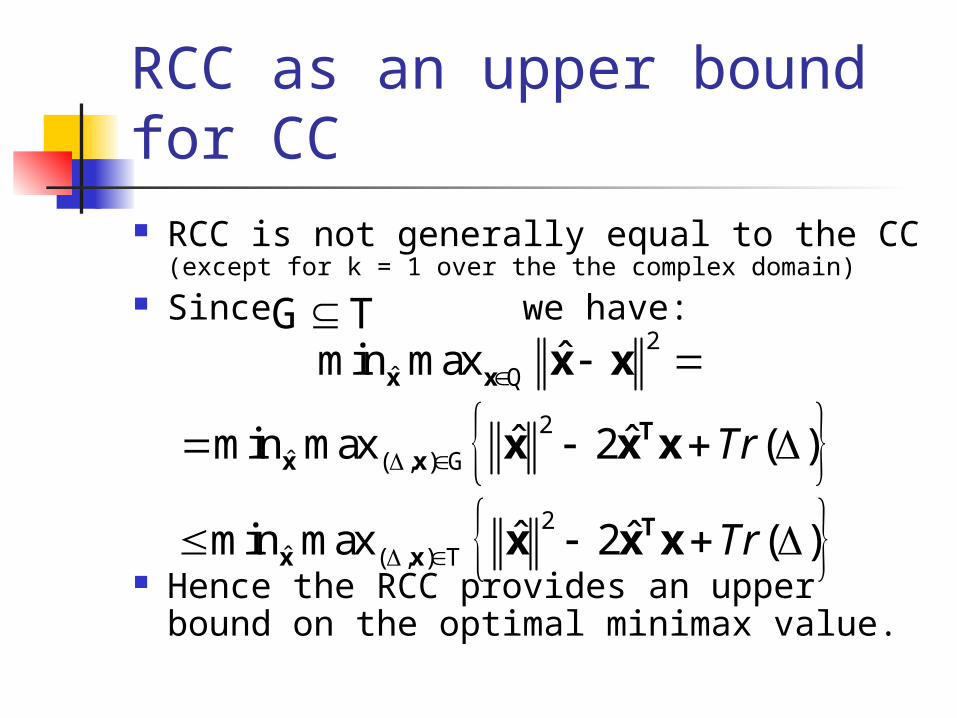
RCC as an upper bound for CC RCC is not generally equal to the CC
(except for k = 1 over the the complex domain) Since we have:
Hence the RCC provides an upper bound on the optimal minimax value.
G T
2
ˆ
2
ˆ ( , )
2
ˆ ( , )
ˆ
ˆ ˆ2
min max
min max
min ma )x
( )
ˆ ˆ2 (
Tr
Tr
x x
Tx x
Tx x
x x
x x x
x x x
Q
G
T
CC – The problem
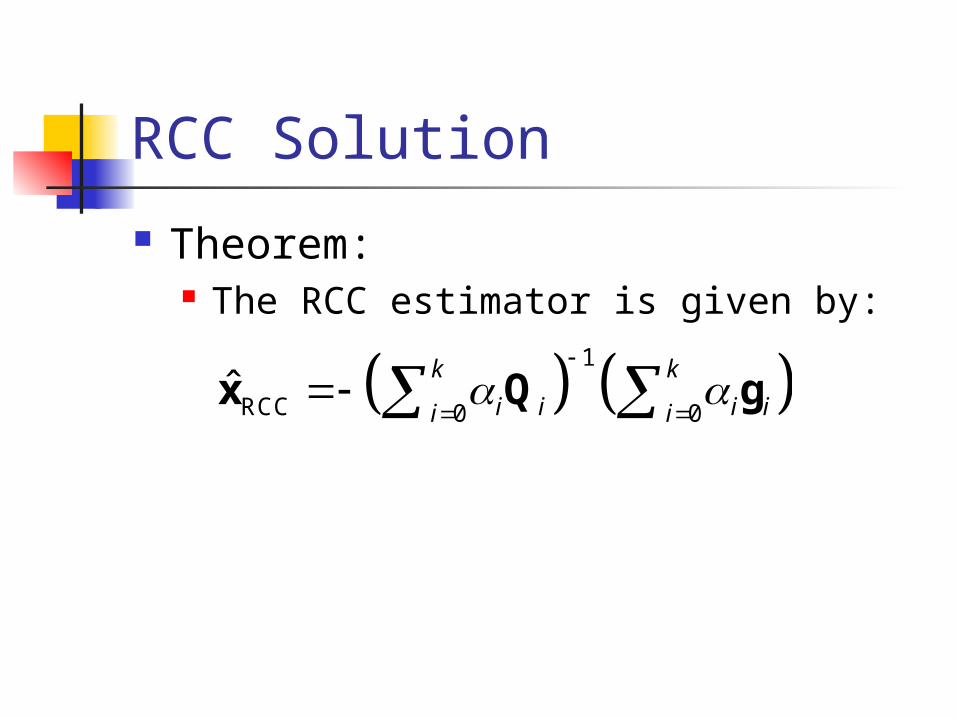
RCC Solution
Theorem: The RCC estimator is given by:
1
RCC 0 0ˆ
k k
i i i ii i
x Q g
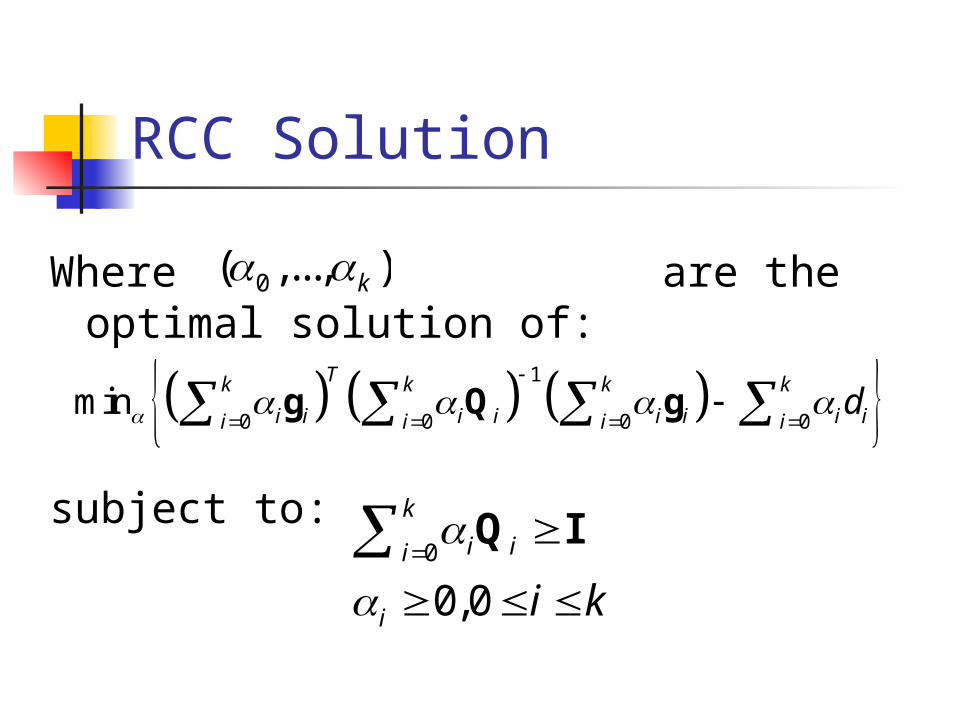
RCC Solution
Where are the optimal solution of:
subject to:
0( ,.. )., k
1
0 0 0 0min
Tk k k k
i i i i i i i ii i i id
g Q g
0
0,0
k
i ii
i i k
Q I
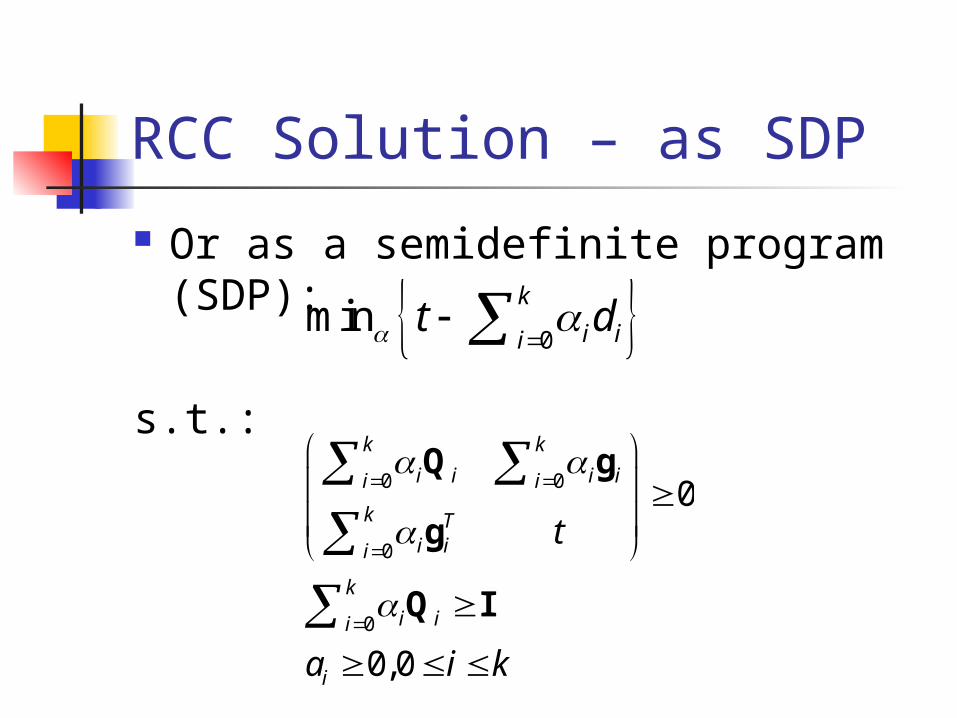
RCC Solution – as SDP
Or as a semidefinite program (SDP):
s.t.:
0min
k
i iit d
0 0
0
0
0
0,0
k k
i i i ii i
k Ti ii
k
i ii
i
t
a i k
Q g
g
Q I
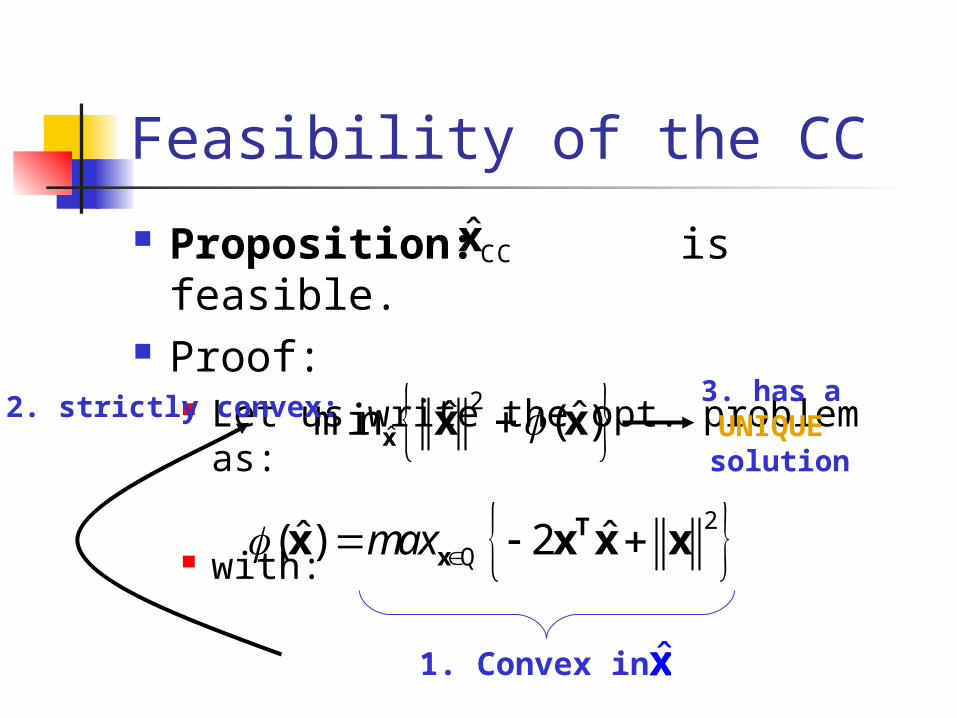
Feasibility of the CC
Proposition: is feasible. Proof:
Let us write the opt. problem as:
with:
CCx̂
2
ˆm ˆ ˆ( )in x x x
2ˆ ˆ( ) 2max T
xx x x xQ
1. Convex in ̂x
2. strictly convex: 3. has a UNIQUE solution
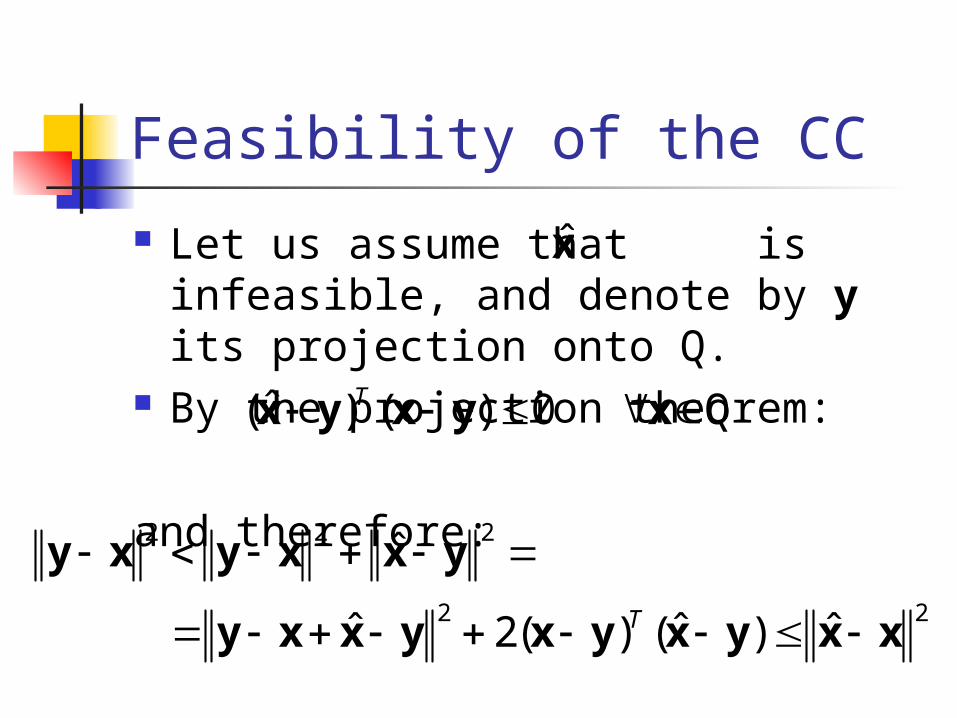
Feasibility of the CC
Let us assume that is infeasible, and denote by y its projection onto Q.
By the projection theorem:
and therefore:
x̂
( (ˆ ) ) 0 T x y x y x Q
2 2 2
2 2
ˆ
ˆ ˆ ˆ2( ) )(T
y x y x x y
y x x y x y x y x x
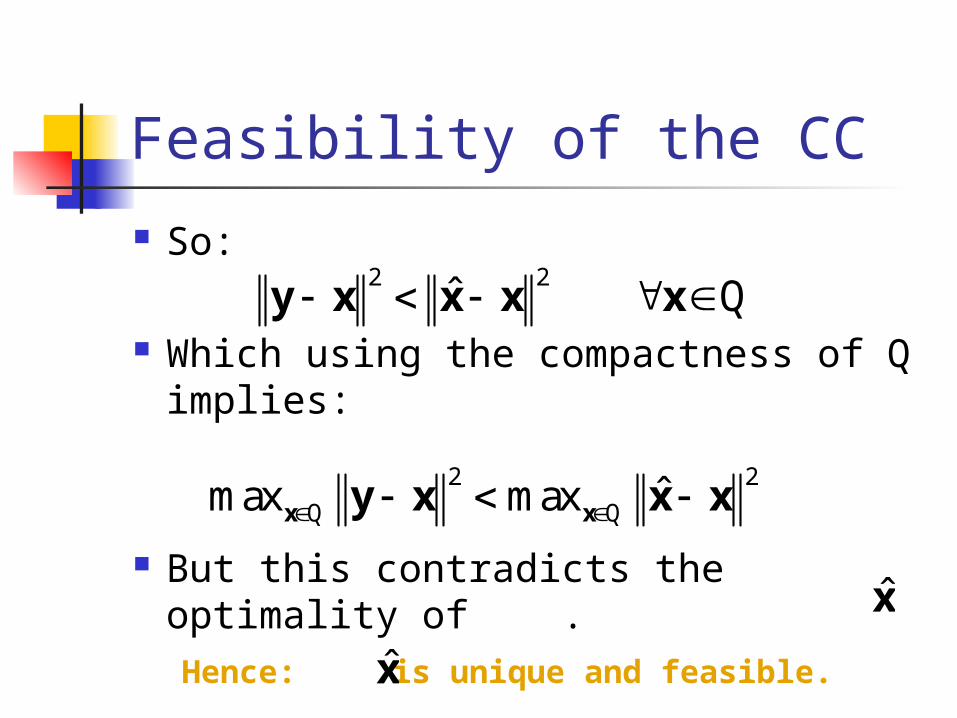
Feasibility of the CC
So:
Which using the compactness of Q implies:
But this contradicts the optimality of .
2 2 ˆ y x x x x Q
2 2ˆmax max x xy x x xQ Q
x̂
Hence: is unique and feasible.x̂
Feasibility of the RCC
Proposition: is feasible. Proof:
Uniqueness follows from the approach used earlier.
Let us prove feasibility by showing that any solution of the RCC is also a solution of the CC.
RCCx̂
Feasibility of the RCC
Let be a solution for the RCC problem. Then:
Since:
We get:
( )ˆ, RCCx T
ˆ ˆ) 2 0, 0( RCC iTr kd i Ti iQ g x
, ˆ ˆ ˆ 0 TRCC RCC ix x Q
) 2
2
ˆ ˆ ˆ ˆ(
ˆ ˆ( ) 0
i i
i
f d
dTr
T TRCC RCC i RCC i RCC
Ti i RCC
x x Q x g x
Q g x
ˆ RCCx Q
CLS as CC relaxation
We now show that CLS is also a (looser) relaxation of the Chebyshev center.
Reminder:2
CLS arg minˆ xx y AxC
: ( ) 2 0,1
0, ,
i i
mi i i
f d i k
d
T Ti ix x x Q x g x
Q g
C
R R
CLS as CC relaxation
Note that is equivalent to
Define the following CC relaxation:
x Q2
, x y AxC
2
( , ) :
. ( ) 0, Tr
T T T T
x x
A A 2y A x y xx
CV.
unharmed
relaxed
2
( , )max ( )Tr x xV}
CLS as CC relaxation
Theorem: The CLS estimate is the same as the relaxed CC over V (here CCV).
Proof: Les us assume is the CCV
solution, and the RCC solution, .
The RCC is a strictly convex problem, so its solution is unique:
( , )1x
2x 1 2x x
2 20r 1 2y Ax y Ax
CLS as CC relaxation
Define
It is easy to show that
(hence it is a valid solution for the CCV)
('
)
r
Tr T T
2 2 1 1 Tx x x x I
A A
( )', 2x V
CLS as CC relaxation
Denote by the objective of the CCV.
By definition:
contradicting the optimality of .
,( )P x
2 1', ) ,( )( )
(P Pn
rTr
T
x xA A
> 0
( , )1x
1 2x x
CLS vs. RCC Now, as in the proof of the feasibility
of the RCC, we know that:
And so:
Which means that the CLS estimate is the solution of a looser relaxation than that of the RCC.
( ) ( , )i iff x x
T V
Modeling Constraints The RCC optimization method is
based upon a relaxation of the set Q
Different characterizations of Q may lead to different relaxed sets.
Indeed, the RCC depends on the specific chosen form of Q.
(unlike CC and CLS)
Linear Box Constraints
Suppose we want to append box constraints upon x:
These can also be written as:
Which of the two is preferable…?
l u Ta x
( )( ) 0l u T Ta x a x
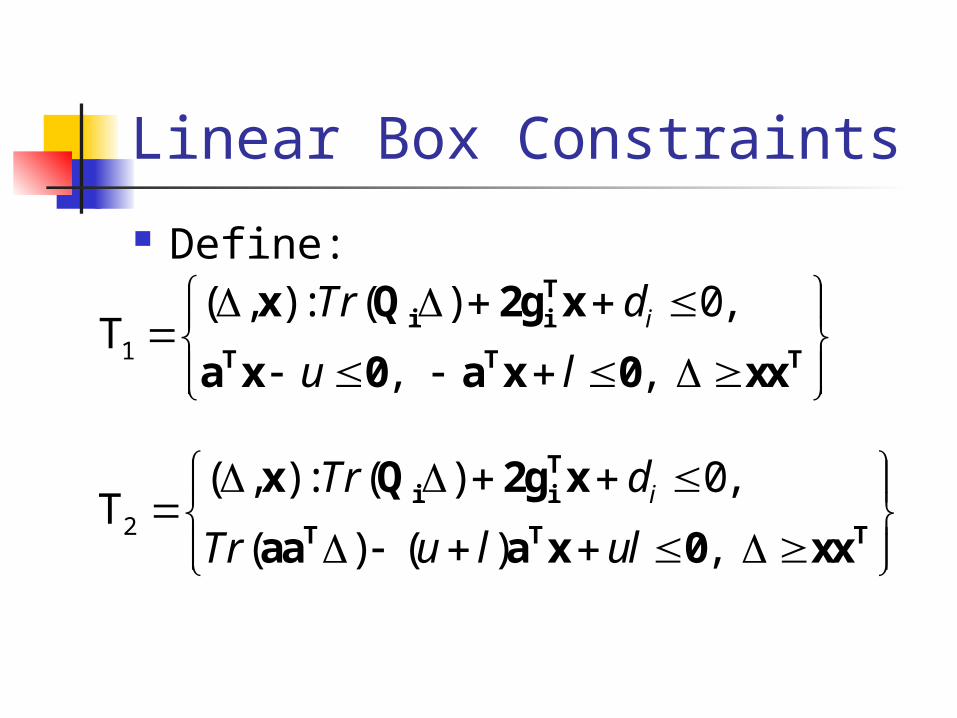
Linear Box Constraints
Define:
1
, ) : ( ) 0,
, ,
( iTr d
u l
Ti i
T T T
x Q 2g x
a x 0 a x 0 xxT
2
, ) : ( ) 0,
( ) ( )
(
,
iTr d
Tr u l ul
Ti i
T T T
x Q 2g x
aa a x 0 xxT
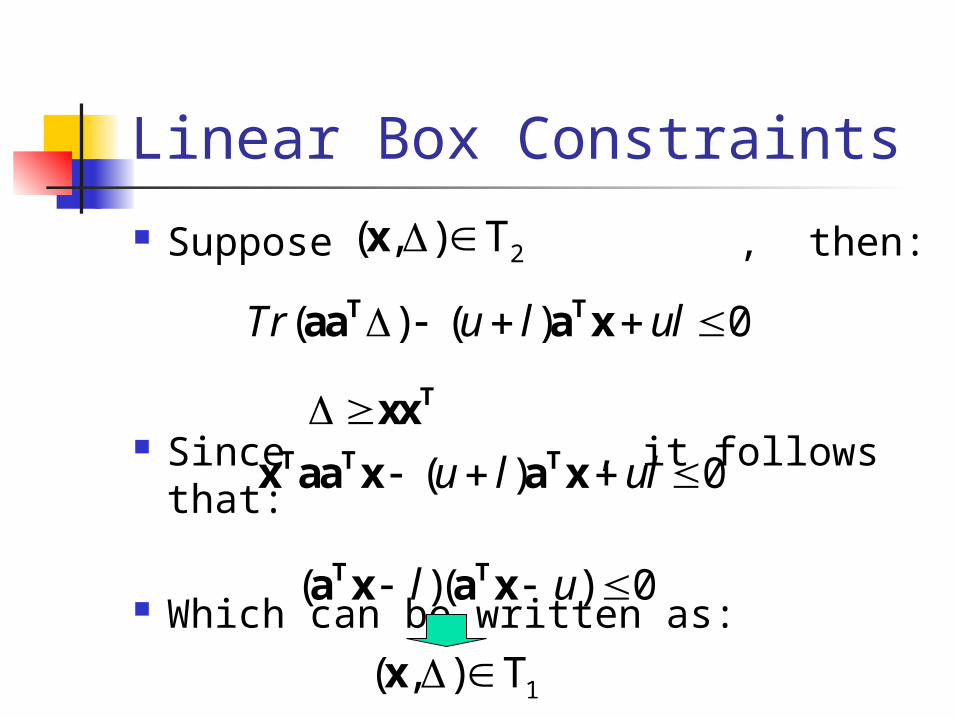
Linear Box Constraints
Suppose , then:
Since , it follows that:
Which can be written as:
2( , ) x T
( ) ( ) 0Tr u l ul T Taa a x
Txx
( ) 0u l ul T T Tx aa x a x
( )( ) 0l u T Ta x a x
1( , ) x T
Linear Box Constraints
Hence:
T1 is a looser relaxation -> T2 is preferable.
2 1T T
Linear Box Constraints
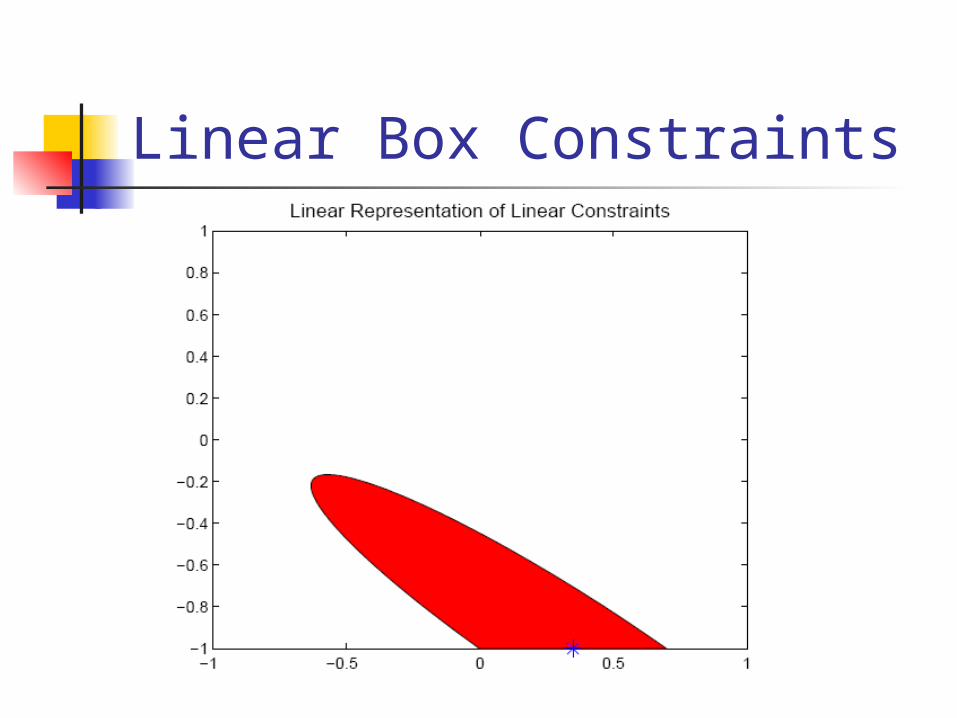
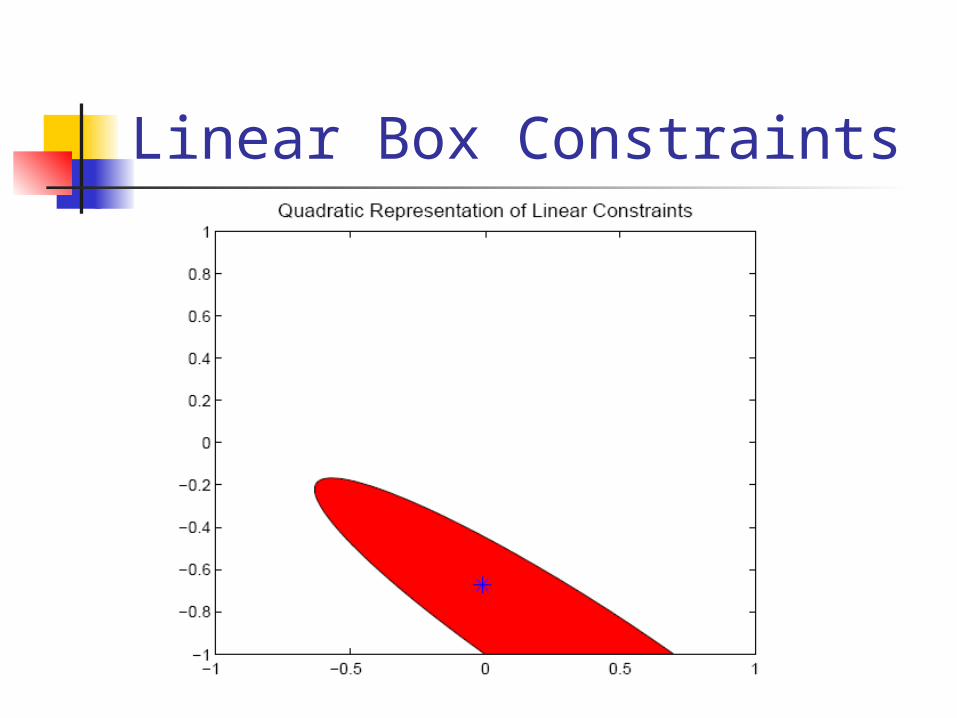
An example in R2: The constraints have been chosen as
the intersection of: A randomly generated ellipsoid [-1, 1] x [-1, 1]
Linear Box Constraints
Linear Box Constraints
An example – Image Deblurring x is a raw vector of a 16 x 16 image. A is a 256 x 256 matrix
representing atmospheric turbulence blur (4 HBW, 0.8 STD).
w is a WGN vector with std 0.05 .
The observations are Ax+w We want x back…
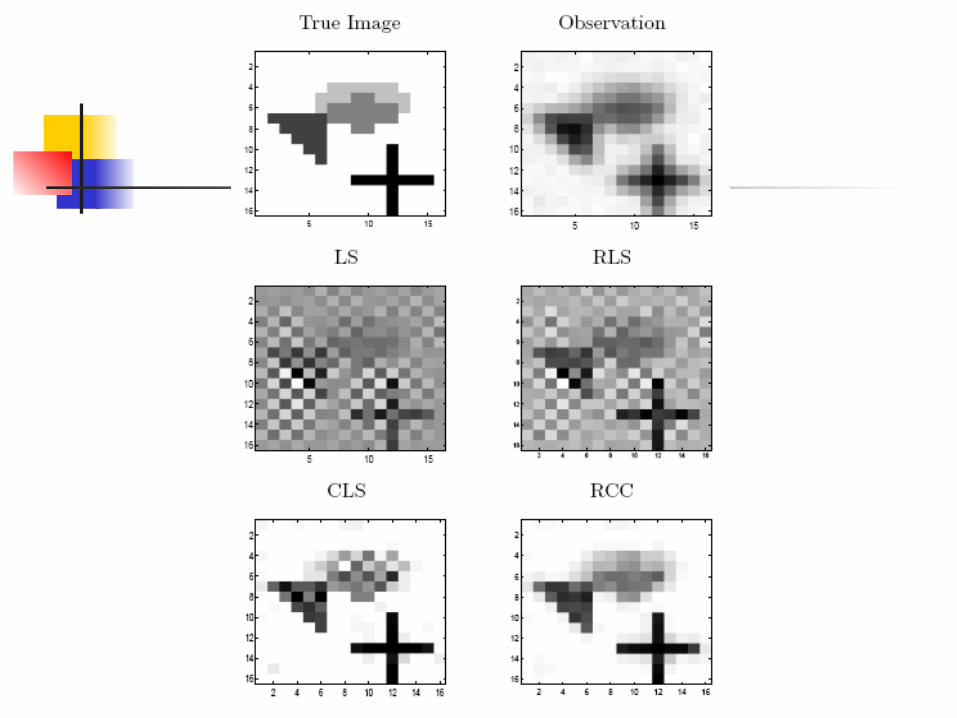
An example – Image Deblurring
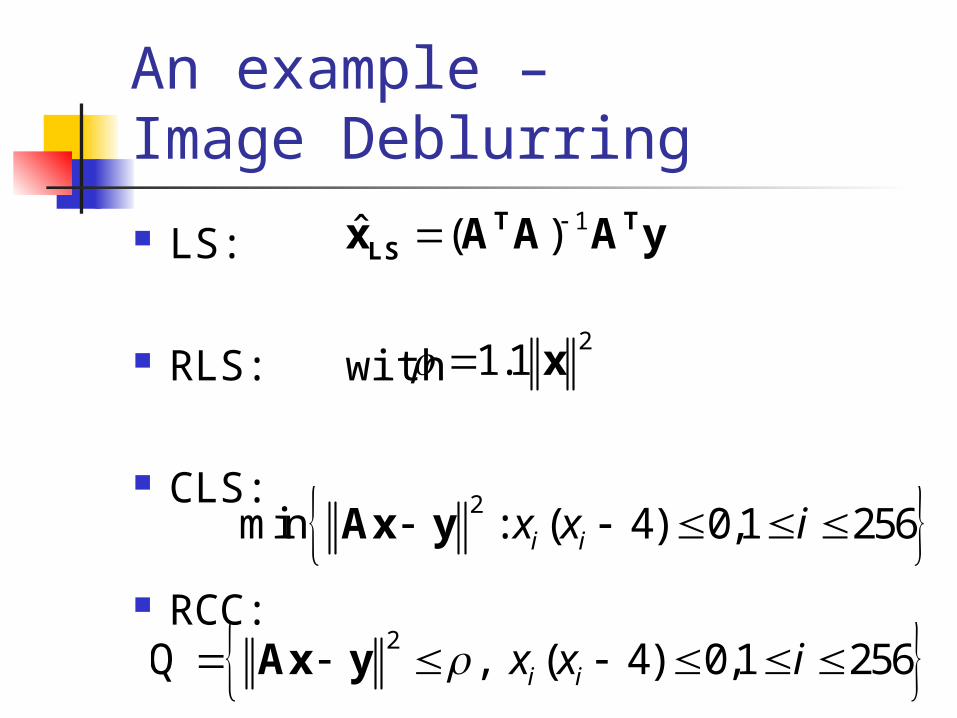
LS:
RLS: with
CLS:
RCC:
1ˆ ( ) T TLSx A A A y
21.1 x
2min : 0,4 5) 2( 1 6i ix ix Ax y
2, 0,1 25( ) 64i ixx i Ax yQ
Chebyshev Center - Agenda Introduction CC - Basic Formulation CC - Geometric Interpretation CC - So why not..? Relaxed Chebyshev Center (RCC)
Formulation of the problem Relation with the original CC Feasibility of the original CC Feasibility of the RCC CLS as a CC relaxation CLS vs. RCC Constraints formulation
Extended Chebyshev Center
Questions..?
Now is the time…
![Interpolación - unican.es€¦ · Interpolación de Chebyshev Interpolación de Chebyshev Interpolación de Chebyshev Dada una función f(x) definida en un intervalo [a;b], la mejor](https://img.pdfslide.us/doc/110x75/5ea02ee04f178c0f894b75f7/interpolacin-interpolacin-de-chebyshev-interpolacin-de-chebyshev-interpolacin.jpg)