Embed Size (px)
DESCRIPTION
DLS
Citation preview

9-04-2013
Uninformed (blind) search algorithms ◦ Breadth-First Search (BFS) ◦ Uniform-Cost Search ◦ Depth-First Search (DFS) ◦ Depth-Limited Search ◦ Iterative Deepening
Best-First Search
HW#1 due today HW#2 due Monday, 9/09/13, in class Continue reading Chapter 3

Formulate — Search — Execute
1. Goal formulation
2. Problem formulation
3. Search algorithm
4. Execution
A problem is defined by four items:
1. initial state
2. actions or successor function
3. goal test (explicit or implicit)
4. path cost (∑ c(x,a,y) – sum of step costs)
A solution is a sequence of actions leading from the initial state to a goal state

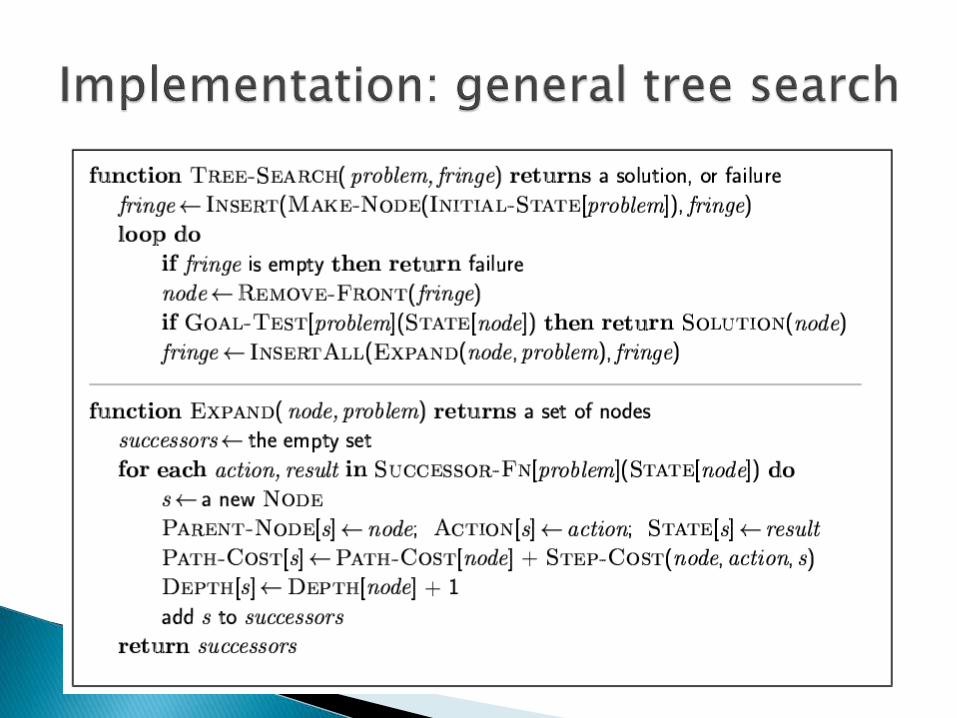
Search algorithms have the following basic form:
do until terminating condition is met
if no more nodes to consider then return fail;
select node; {choose a node (leaf) on the tree}
if chosen node is a goal then return success;
expand node; {generate successors & add to tree}
Analysis ◦ b = branching factor
◦ d = depth
◦ m = maximum depth
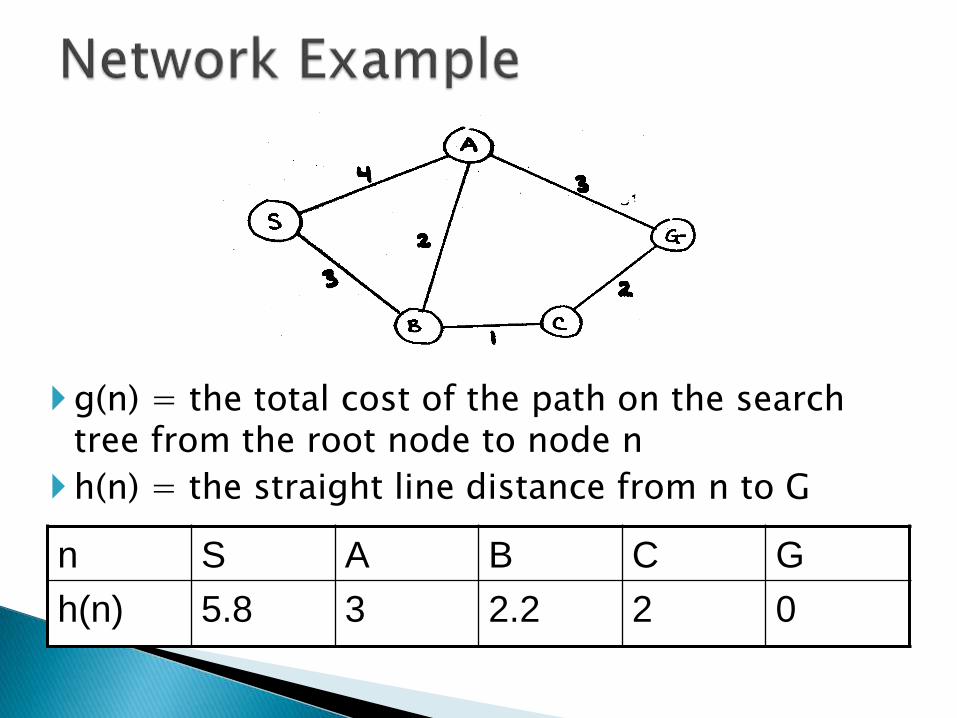
g(n) = the total cost of the path on the search tree from the root node to node n
h(n) = the straight line distance from n to G
n S A B C G
h(n) 5.8 3 2.2 2 0
Uninformed search strategies use only the information available in the problem definition
Breadth-first search ◦ Uniform-cost search
Depth-first search ◦ Depth-limited search
◦ Iterative deepening search
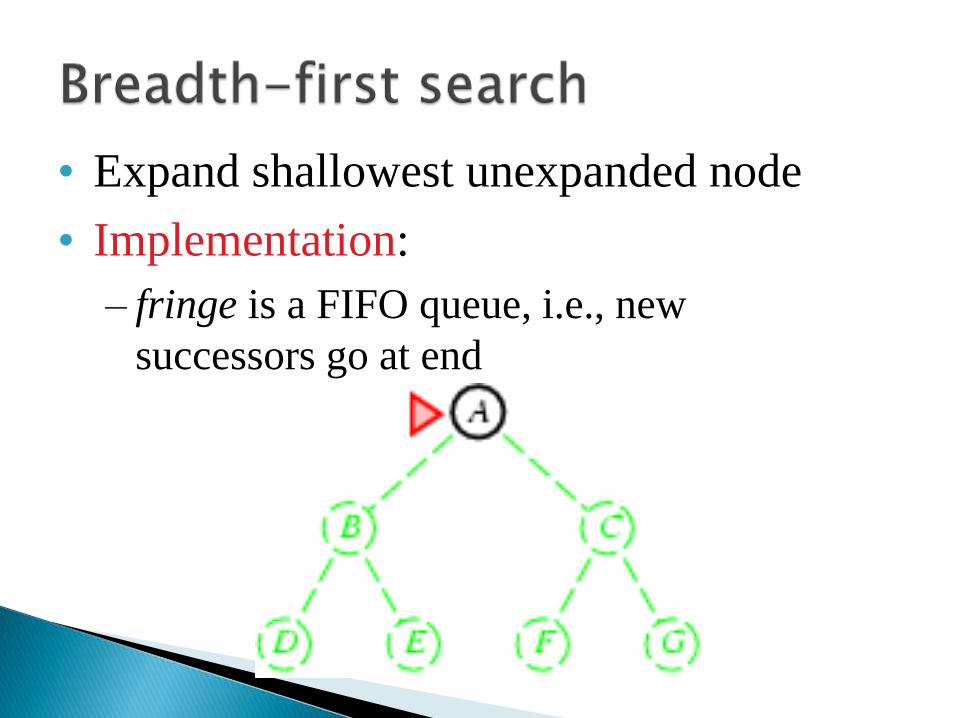
• Expand shallowest unexpanded node
• Implementation:
– fringe is a FIFO queue, i.e., new
successors go at end

idea: order the branches under each node so that the “most promising” ones are explored first
g(n) is the total cost of the path on the search tree from the root node to node n
sort the open list by increasing g(), that is, consider the shortest partial path first

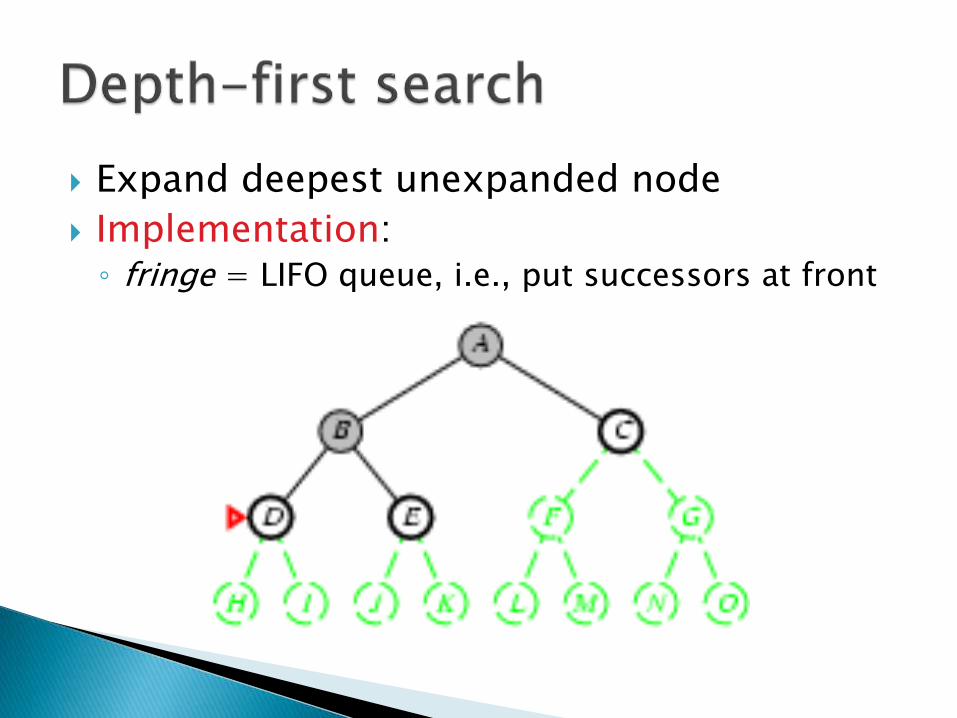
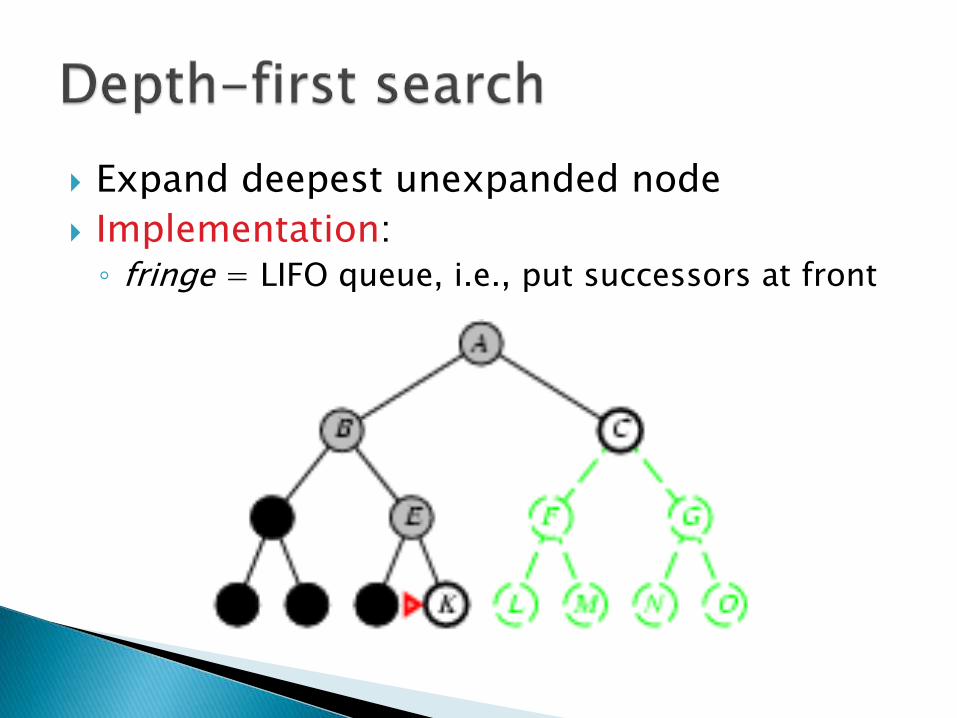
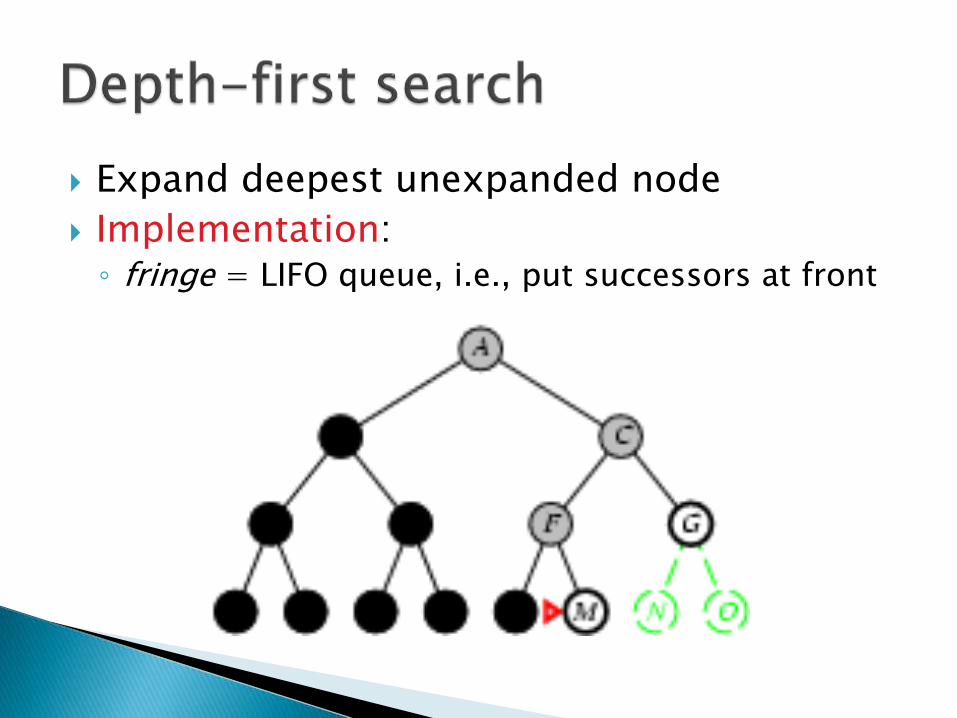
Expand deepest unexpanded node
Implementation: ◦ fringe = LIFO queue, i.e., put successors at front

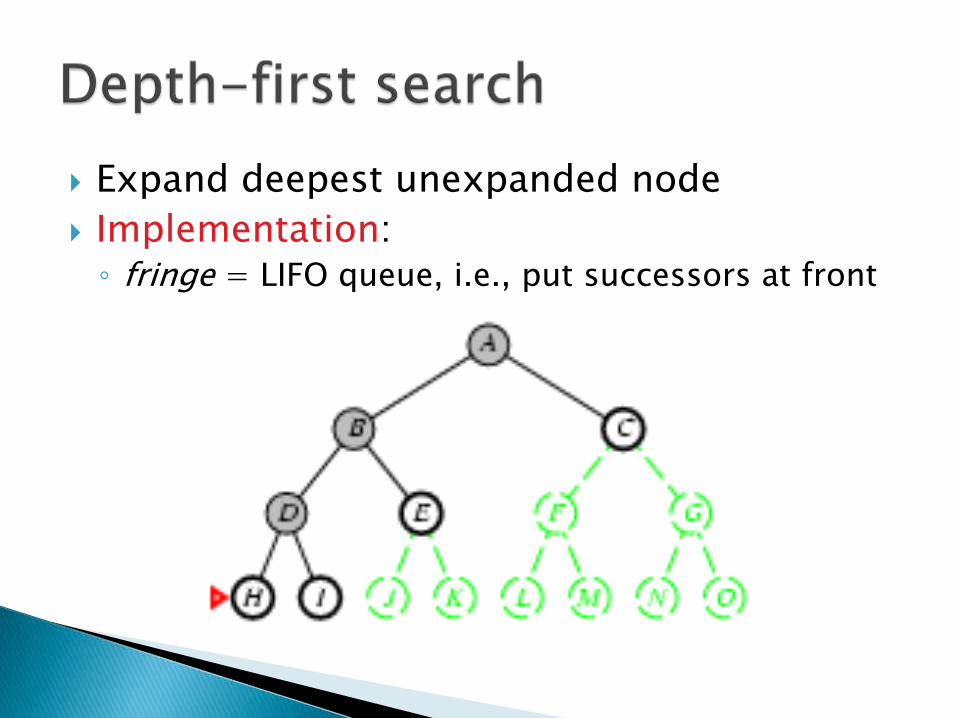
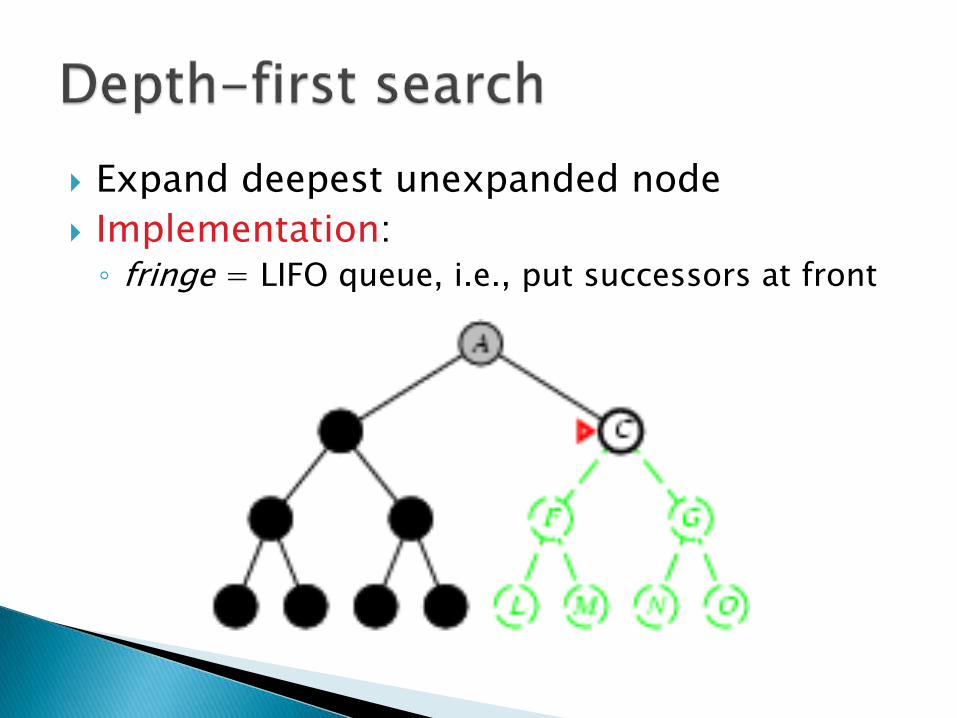
Expand deepest unexpanded node
Implementation: ◦ fringe = LIFO queue, i.e., put successors at front
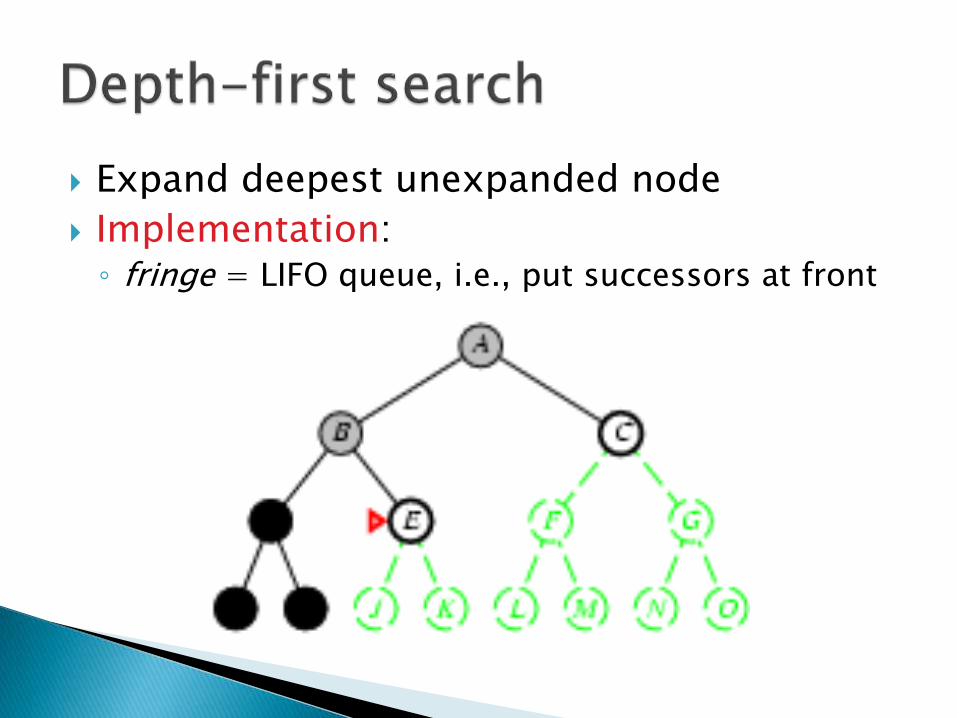
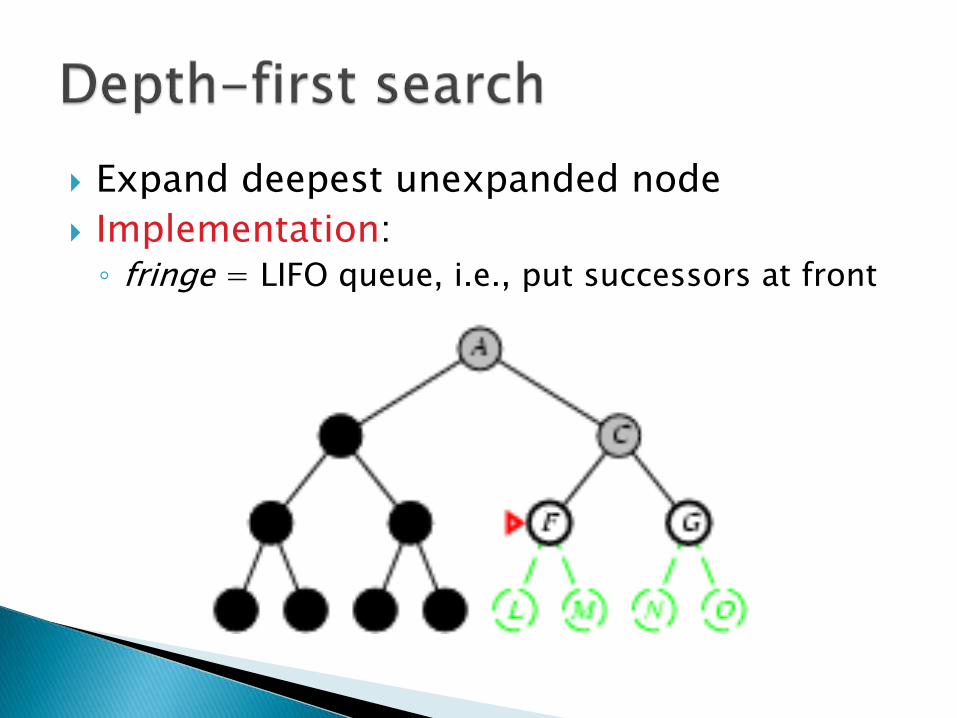
Expand deepest unexpanded node
Implementation: ◦ fringe = LIFO queue, i.e., put successors at front
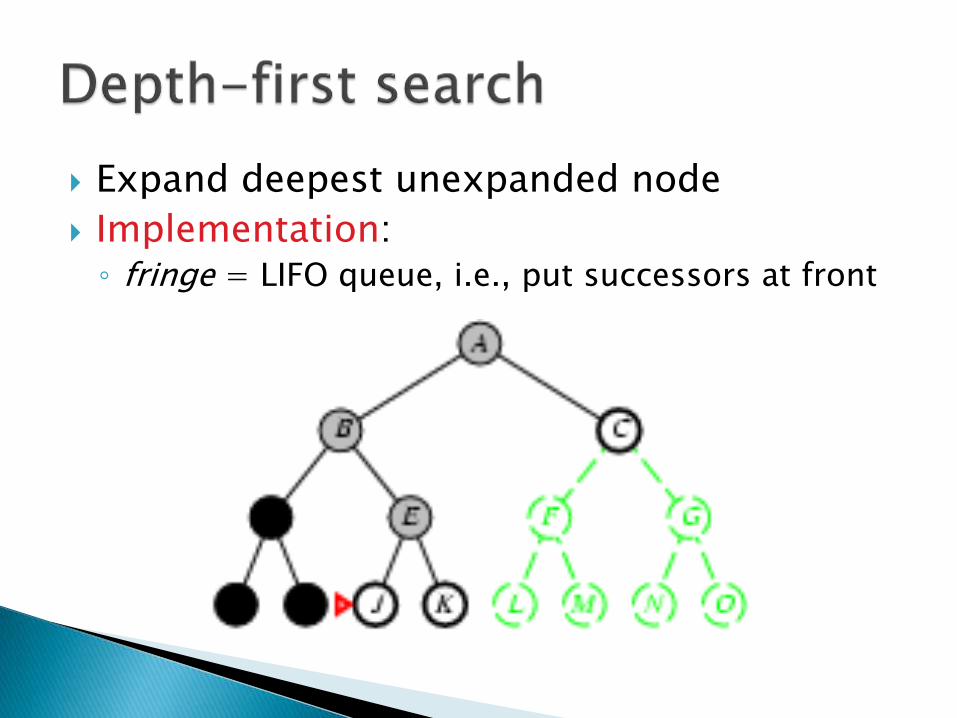
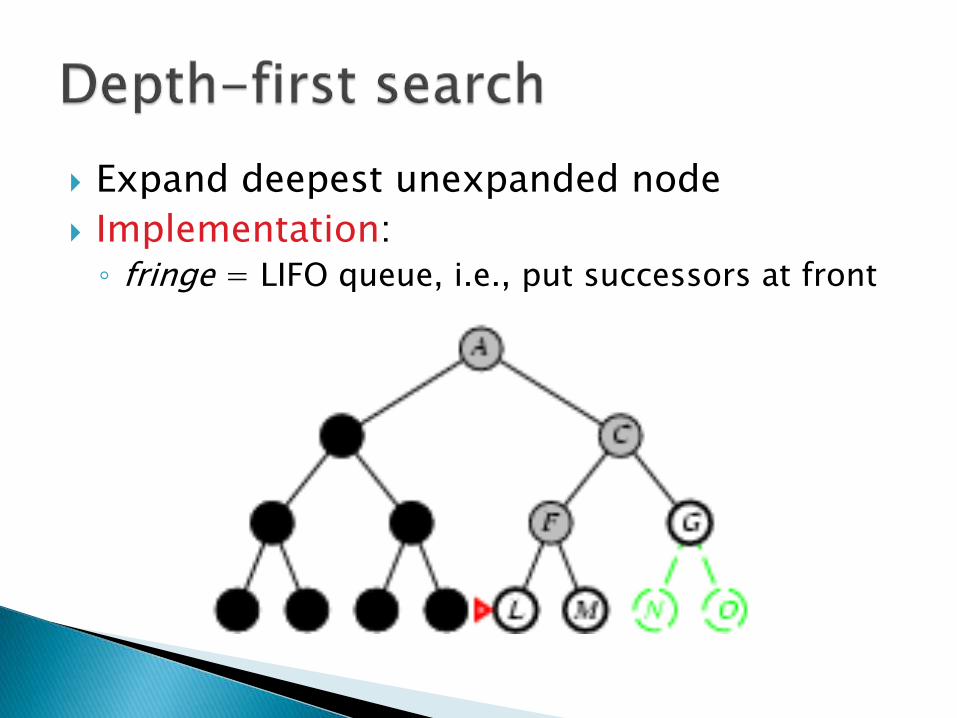
Expand deepest unexpanded node
Implementation: ◦ fringe = LIFO queue, i.e., put successors at front

Expand deepest unexpanded node
Implementation: ◦ fringe = LIFO queue, i.e., put successors at front
Expand deepest unexpanded node
Implementation: ◦ fringe = LIFO queue, i.e., put successors at front
Expand deepest unexpanded node
Implementation: ◦ fringe = LIFO queue, i.e., put successors at front
Expand deepest unexpanded node
Implementation: ◦ fringe = LIFO queue, i.e., put successors at front
Expand deepest unexpanded node
Implementation: ◦ fringe = LIFO queue, i.e., put successors at front
Expand deepest unexpanded node
Implementation: ◦ fringe = LIFO queue, i.e., put successors at front
Expand deepest unexpanded node
Implementation: ◦ fringe = LIFO queue, i.e., put successors at front
Expand deepest unexpanded node
Implementation: ◦ fringe = LIFO queue, i.e., put successors at front

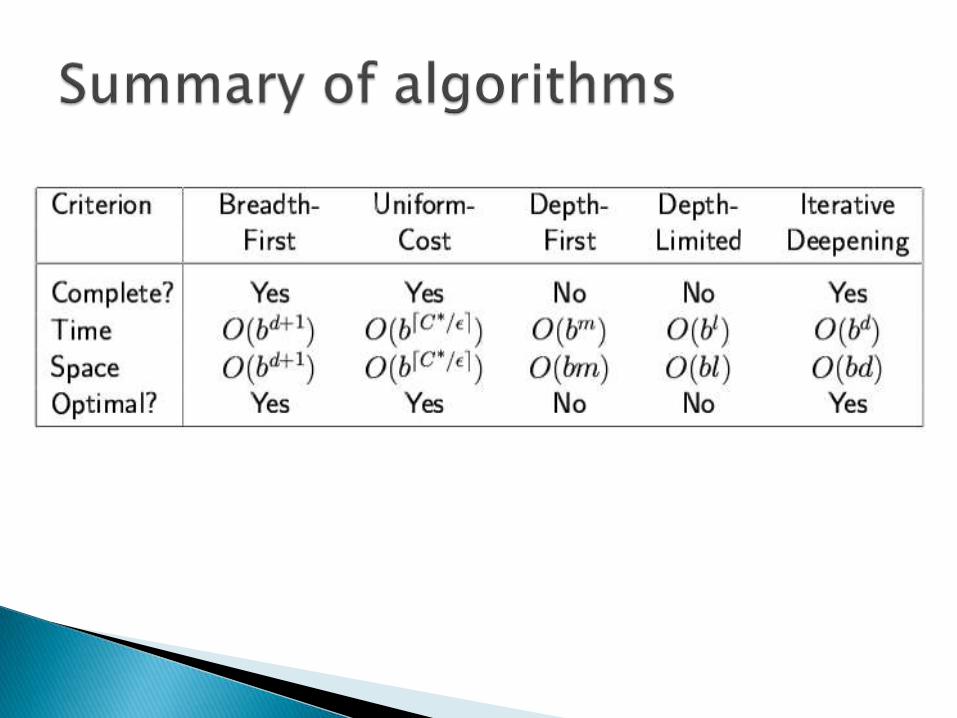
Complete? No: fails in infinite-depth spaces, spaces with
loops ◦ Modify to avoid repeated states along path complete in finite spaces
Time? O(bm): terrible if m is much larger than d ◦ but if solutions are dense, may be much faster than
BFS
Space? O(bm), i.e., linear space! Optimal? No
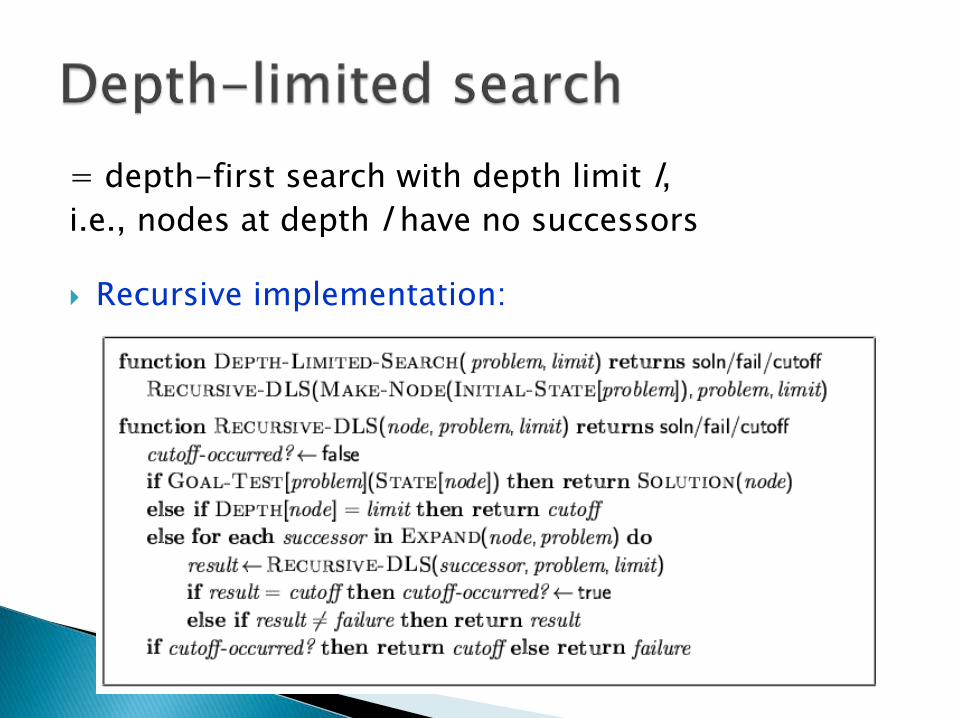
= depth-first search with depth limit l,
i.e., nodes at depth l have no successors
Recursive implementation:







Number of nodes generated in a depth-limited search to depth d with branching factor b:
NDLS = b0 + b1 + b2 + … + bd-2 + bd-1 + bd
Number of nodes generated in an iterative deepening search to depth d with branching factor b:
NIDS = (d+1)b0 + d b^1 + (d-1)b^2 + … + 3bd-2 +2bd-1 + 1bd
For b = 10, d = 5, ◦ NDLS = 1 + 10 + 100 + 1,000 + 10,000 + 100,000 = 111,111 ◦ NIDS = 6 + 50 + 400 + 3,000 + 20,000 + 100,000 = 123,456
Overhead = (123,456 - 111,111)/111,111 = 11%

Complete?
Yes
Time?
(d+1)b0 + d b1 + (d-1)b2 + … + bd = O(bd)
Space?
O(bd)
Optimal?
Only if step cost = 1; otherwise NO
Problem formulation usually requires abstracting away real-world details to define a state space that can feasibly be explored
Variety of uninformed search strategies
Iterative deepening search uses only linear space and not much more time than other uninformed algorithms

Idea: use an evaluation function f(n) for each node ◦ estimate of "desirability"
Expand most desirable unexpanded node
Implementation:
Order the nodes in the Open List (fringe) in decreasing order of desirability
Special cases: ◦ greedy best-first search
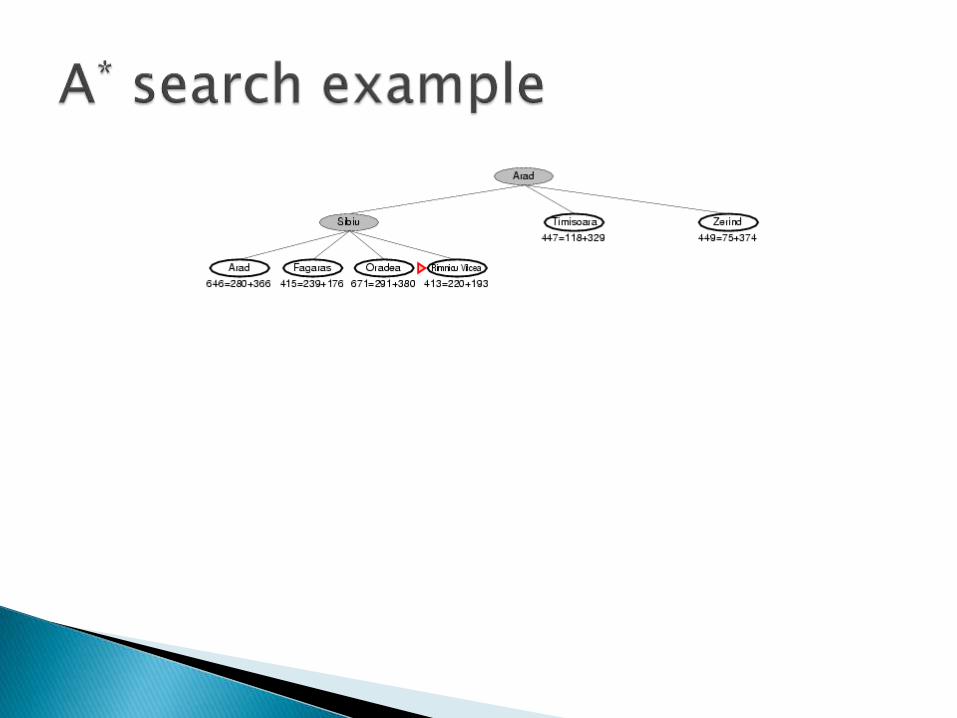
◦ A* search

g(n) path-cost function
= cost of the path from the root to node n found so far (less than or equal to g*(n))
h(n) “heuristic” function
estimates the cost of a path from node n to the “closest” goal node (
f(n) evaluation function
measure of how likely node n is part of a solution
one possibility: f(n) = g(n) + h(n)

Possible evaluation functions:
f(n) = probability that a node is on the right path
f(n) = distance function (measure of the difference
between node n & the nearest goal node)
f(n) = g(n)
f(n) = h(n)
f(n) = g(n) + h(n)
estimates the total cost of a solution path
which goes through node n
≡ Uniform Cost
≡ Greedy
≡ A*


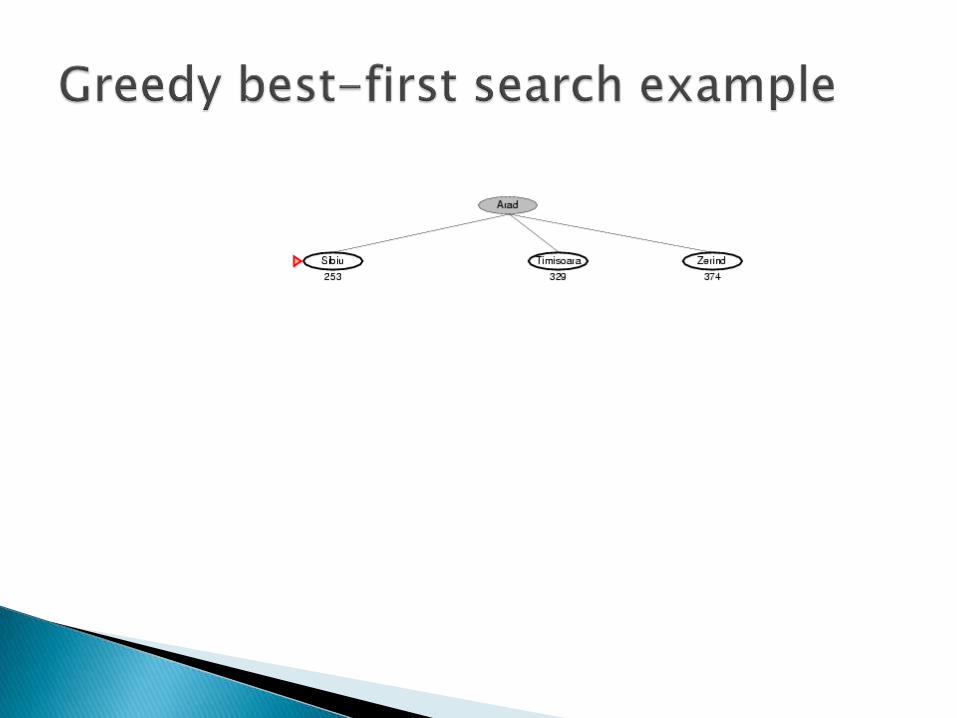
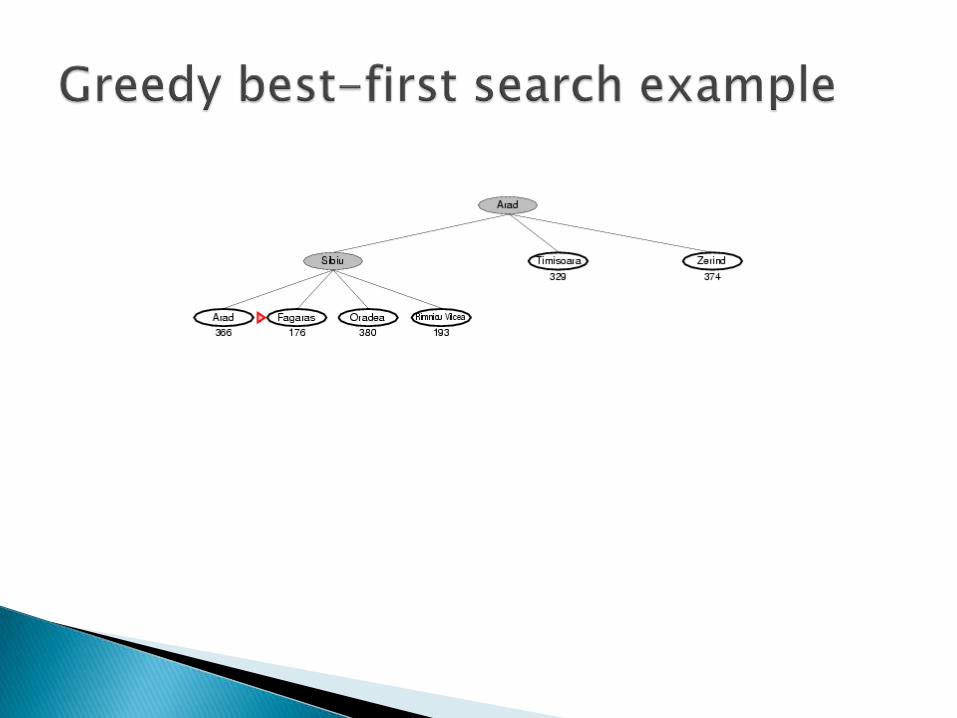
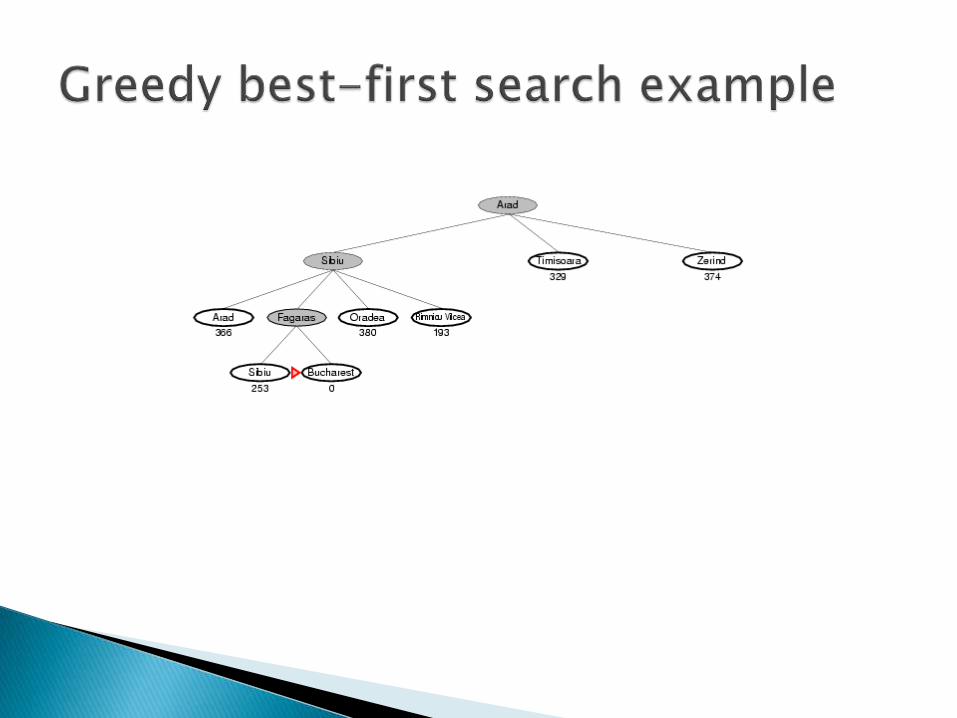
Evaluation function f(n) = h(n) (heuristic)
= estimate of cost from n to goal
e.g., hSLD(n) = straight-line distance from n to Bucharest
Greedy best-first search expands the node that appears to be closest to goal

Complete?
No – can get stuck in loops,
e.g., Iasi Neamt Iasi Neamt
Time?
O(bm), but a good heuristic can give dramatic improvement
Space?
O(bm) -- keeps all nodes in memory
Optimal?
No
Idea: avoid expanding paths that are already expensive
prune longer paths (if there is >1 path from the root to node n, only keep the shortest on the search tree)
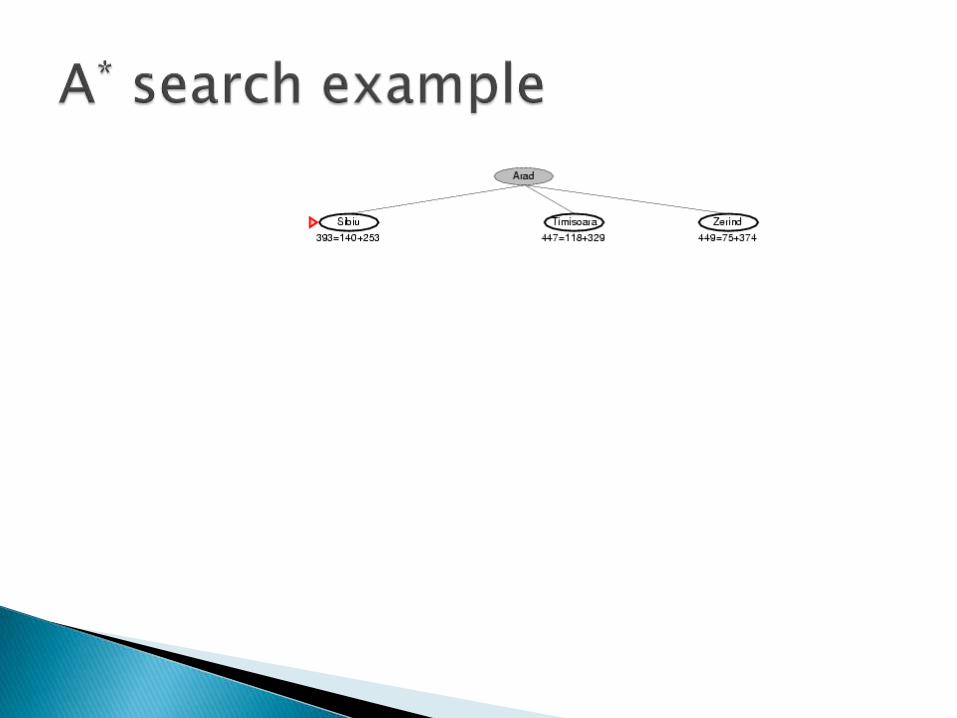
Evaluation function f(n) = g(n) + h(n)
g(n) = lowest cost so far to reach n
h(n) = estimated cost from n to goal
f(n) = estimated total cost of path through n to goal

f(n) estimates the total cost of a solution path which goes through node n
f(n) = g(n) + h(n)
lowest-cost path
from S to n
(found so far)
“heuristic” estimate
of cost from n to G

for a node, N,
N h(N)
Ng(N)
heuristic function
(superscript)
path-cost function
(subscript)




A heuristic h(n) is admissible if for every
node n, h(n) ≤ h*(n), where h*(n) is the true
cost to reach the goal state from n.
An admissible heuristic never overestimates
the cost to reach the goal, i.e., it is
optimistic
Example: hSLD(n) (never overestimates the
actual road distance)
Theorem: If h(n) is admissible, A* using
TREE-SEARCH is optimal

A heuristic is consistent if for every node n, every successor n' of n generated by any action a, h(n) ≤ c(n,a,n') + h(n')
If h is consistent, we have
f(n') = g(n') + h(n')
= g(n) + c(n,a,n') + h(n')
≥ g(n) + h(n) = f(n)
i.e., f(n) is non-decreasing along any path.
Theorem: If h(n) is consistent, A* using GRAPH-SEARCH is optimal

The following figure shows a portion of a partially expanded
search tree. Each arc between nodes is labeled with the cost of
the corresponding operator, and the leaves are labeled with the
value of the heuristic function, h.
Which node (use the node’s letter) will be expanded next by each
of the following search algorithms?
(a) Depth-first search
(b) Breadth-first search
(c) Uniform-cost search
(d) Greedy search
(e) A* search
5
D
5
A
C
5 4
19
6
3
h=15
B
F G E
h=8 h=12 h=10 h=10
h=18
H
h=20
h=14

Search
DFS
Depth
Limited
Iterative
Deepening
BFS Uniform
Cost
g(n)
BMA* BestFS
f(n)
Greedy
f(n) =h(n)
A*
f(n)=g(n)+h(n)
* British Museum Algorithm (i.e. Exhaustive Search)
cf: Animated Search Algorithms at
http://www.cs.rmit.edu.au/AI-Search/Product/





























