-
7/28/2019 04 Chapter 8
1/14
Chapter 8: Generation of Floor Response Spectra and Multiple
Support Excitation
G. R. Reddy & R. K. Verma
8.1 Introduction
Industrial structures support systems and components (SCs) at
different elevations. These
systems and components are designed using Floor Time History
(FTH) or Floor
Response Spectra (FRS). The FTH is obtained at various floor
levels and at the locations
where SCs are supported, from structural analysis. The FRS is
generated for damping of
the SCs using time history analysis, stochastic analysis or
direct simplified methods.
8.2 FRS generation
Generally, time history methods are used for generating FRS from
FTH because of its
simplicity and realistic. For conservative design of SCs, direct
method which is simple
and less time consuming can be adopted.
8.2.1 Time History Analysis
The various steps involved in the time history analysis are
given below:
1. Generate design basis ground motion called design basis time
history.
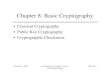
2. Generate mathematical model of the structure. The model could
be beam model
or 3D FE Model as shown in Fig. 1(a) and 1(b).
13
Raft
Foundation
Outer
Containment
Inner
ContainmentTail
Pipe
Tower
Calandria
Fig. 1(a): Typical Reactor Building and 3D FE model
-
7/28/2019 04 Chapter 8
2/14
3. Generate floor time histories from the structural analysis
using design basis time
history.
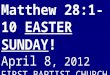
4. Generate FRS using floor time histories. While generating
FRS, the spectrum
ordinates shall be computed at sufficiently small frequency
intervals to produce
accurate response spectra, including significant peaks normally
expected at the
natural frequencies of the structure. One acceptable frequency
intervals to
compute FRS is, at frequencies listed in Table 1 [1]. Fig. 2
shows the FRS at
various levels of a typical reactor building.
Table 1: Frequency steps for FRS generation
14
Outer
Containment
Inner
Containment
Tail Pipe
Tower
Calandria
Fig. 1(b): Typical Reactor Building and Beam model
Frequency Range
(Hz)
Increment (Hz)
0.5-3.03.0-3.63.6-5.0
5.0-8.0
8.0-15.015.0-18.0
18.0-22.0
22.0-34.0
0.100.150.20
0.25
0.501.0
2.0
3.0
-
7/28/2019 04 Chapter 8
3/14
8.2.2 Stochastic Analysis
The various steps involved in stochastic method are given
below:
1. Generate design basis ground motion called design basis Power
Spectral Density
Function (PSDF).
2. Generate mathematical model of the structure. The model could
be beam modelor 3D FE Model.
3. Generate floor Power Spectral Density Function from the
structural analysis using
design basis PSDF.
4. Generate FRS using floor PSDF. The frequency intervals shall
be chosen as
explained above.
15
0.00 10.00 20.00 30.000.00
0.51
1.02
1.53
2.04
Floor Response Spectra at Bottom of
Calandria (Node 2) in Z - Direction
=1%
=2%
=5%
Sa
/g
Frequency (Hz)
0.00 5.00 10.00 15.00 20.00 25.00 30.00 35.000.00
2.00
4.00
6.00
8.00
10.00
12.00Floor Response Spectra at Steam Drum Level
EL. 123.00 m (Node 14) in Z - Direction
=1%
=2%
=5%
Sa
/g
Frequency (Hz)
0.00 10.00 20.00 30.000.00
0.50
1.00
1.50
2.00
2.50
3.00
3.50
4.00
4.50
5.00
Floor Response Spectra at Top of Calandria
EL. 95.00 m (Node 5) in Z - Direction
=1%
=2%=5%
Sa
/g
Frequency (Hz)
Fig. 2: Floor Response Spectra at various floor levels of
atypical reactor building
-
7/28/2019 04 Chapter 8
4/14
8.2.3 Simplified Analysis
The various steps involved in the simplified analysis are given
below:
1. Generate design basis ground motion called design basis
response spectrum as
shown in Fig. 3(b) for given structural damping.
2. Generate mathematical model of the structure as shown in Fig.
3(a). The model
could be beam model or 3D FE Model.
3. Generate FRS based on the procedure out lined below [2].
222
2222
),()},(){(
)()(4})(1{
1AABiBi
Bi
A
Bi
ABiA
Bi
A
EihShS
hh
S
+
++
=
2( )E i Ei
i
S U S=
SE- Floor response spectrum taking into account every evaluated
mode of the
structure
Ui- The i-th mode excitation function value of the floor. It is
the product of
modal participation factor and the floor mode shape in i-th
mode
SEi- The maximum value of absolute acceleration response of the
systems and
components under i-th mode acceleration of structure
hA- Damping factor of systems and components
TA-Natural period of systems and components
hBi- Damping factor of the structure
TBi- Natural period of the structure
S (TBi, hBi)- The standard design ground spectrum corresponding
to TBi, hBi of the
structure
S (TA, hA)-The standard design ground spectrum corresponding to
TA, hA of the
systems and components.
Notes-
(1) The mass mA of the systems and components needs to be
sufficiently smaller than
the mass mBi of the structure.
16
-
7/28/2019 04 Chapter 8
5/14
(2) The floor response spectra, obtained from the above method,
need to be
broadened by at least 10% to account the uncertainty of
frequency analysis of
SSCs.
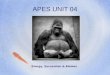
Using the above procedure, FRS at the top of the building is
generated and
compared with time history analysis and shown in Fig. 3(d). It
can be seen that the
spectra generated using simplified method is conservative
compared to the one generated
using TH analysis.
17
Fig. 3(c): Time History compatible to thegiven spectra
Fig. 3(b): Typical DesignResponse Spectrum
Y
X
Fig. 3(a): Beam model of a
typical cantilever structure
Fig. 3(d): FRS at top of the building
-
7/28/2019 04 Chapter 8
6/14
8.3 Analysis of Systems subjected to Multiple Support
Excitation
Consider the following simple spring mass system, for this
system equation of motion
can be written as follows.
Fig. 4: Spring mass system
[ ]{ } [ ]{ } [ ]{ } [ ] { }1gxMxKxCxM =++ 1
where M is mass matrix (lumped/consistent), C is damping
co-efficient matrix and K isstiffness matrix. In the absence of
external damping and neglecting the structural
damping, the free vibration of the system is expressed by
[ ]{ } [ ]{ } 0xKxM =+ or
{ } [ ] [ ]{ } 0xKMx -1 =+
Let
{ } { } { } { } { } 22 -t)sin(-xsoandt)sin(x ===
Free vibration characteristic of the system becomes
{ } [ ] [ ]{ } 0KM- -12 =+
[ ] [ ]{ } { }KM 2-1 =or
[ ] [ ] andA,asKMTaking 2-1 =
[ ]{ } { } A =
The above eigen value problem can be solved for eigen values
called naturalfrequencies (n) of the system and the eigen vectors
called mode shapes ( n) of the
system. The number of eigen values and eigen vectors will be
equal to the number of
degrees of freedom of the system. However, the number of modes
that are important for
response evaluation is fixed based on the procedure explained
earlier.
{ } { }XxLet = 218
-
7/28/2019 04 Chapter 8
7/14
{ } ntdisplacemedgeneralizetheisXandshapeetheisWhere mod
Substituting Eq. 2 into 1,
[ ]{ } [ ]{ } [ ]{ } [ ] { }1gxMXKXCXMgetwe =++ 3
Multiplying Eq. 3 with { }T
on both sides we get
{ } [ ]{ } { } [ ]{ } { } [ ]{ } { } [ ] { }1gTTTT
xMXKXCXM =++ 4
Considering excitations from ns supports [1,3,4], Eq. 4 can also
be written as
{ } [ ]{ } { } [ ]{ } { } [ ]{ } { } [ ] { }sgT
ns
s
TTTUxMXKXCXM
1=
=++ 5
where Us is the influence vector. It has unity values along each
degree of freedom for
uniform support excitation. For the case of multiple support
excitations, it is the
displacement vector of the structural system when the support s
undergoes a unit
displacement in the direction of motion of the support while the
other supports remain
fixed.
Equation 5 can be solved using direct time history method. To
solve using modal
superposition technique, Eq. 5 can be simplified as follows.
Using orthogonal properties of mode shapes, Eq. 5 can be written
as
[ ] [ ] 21
1 2nsp
n n n n ns g sn
X X X x =
+ + =
&& & && 6
where ns is the participation factor for support s, mode n. The
equation for evaluation of
residual rigid response due to the missing mass is changed to
the following.
[ ] { } [ ] { } { }{ }1 1
nsp n
r ns si i g s i
K x M U x= =
= && 7
Case Study: 1
19
-
7/28/2019 04 Chapter 8
8/14
Let us consider a piping running from the reactor to the steam
drum as shown in Fig.
5(a). This piping called tail pipe will be subjected to the
support motion at top of the
reactor and at the steam drum location. The spectra at two
locations are shown in the
Figs. 6(a) and (b) respectively. The interaction between two
piping can be neglected
because they are connected to large size components. For
explaining the method of
analysis of systems subjected to multiple support excitations,
the piping is idealized as
shown in Fig. 5(b). For simplicity, consider a two degree of
freedom system as shown in
Fig. 7, similar to the system shown in Fig. 5(b), the
frequencies and mode shapes of the
system are evaluated using the similar procedure explained in
chapter 4 and are given
below.
Frequencies are 17.6 rad/sec (2.8 Hz) and 28.3 rad/sec (4.5 Hz)
in first and second
mode respectively. The ortho-normalized mode shapes are given
below.
20
-
7/28/2019 04 Chapter 8
9/14
=
=
185.0
657.0
465.0
261.0
23
22
13
12
and
In the above vectors, the first suffix indicates mode number and
the second suffix
indicates the node number.
21
-
7/28/2019 04 Chapter 8
10/14
The combined stiffness and mass matrix for the full system can
be written as
follows
[ ]
1000 1000
1000 1500 500
500 1500 1000
1000 1000
K
=
[ ]
0
2
4
0
M
=
Applying unit displacement at support 2 (Node 1) and at support
1 (node 4), the
influence vectors respectively can be obtained as follows.
{ } { }
=
=
4
3
4
1
4
1
4
3
12UU
The suffix of the influence vector indicates the support number.
Now using Eqs. 5
and 6, the participation factors can be obtained as follows.
The participation factor for support 1 excitation in mode 1 is
obtained as follows.
22
Fig.7: Idealized model for the
piping along vertical direction
Support 2
Support 1
K3= 1000
K2= 500
K1= 1000
m1
=2
m2=4
Node 1
Node 2
Node 3
Node 4
-
7/28/2019 04 Chapter 8
11/14
[ ] [ ] { }11 1 T
M U =
[ ] )382.2(526.1
4
34
1
4
2465.0261.011 =
= T
Similarly the participation factor for support 2 excitation in
mode 1 is
[ ] [ ] { }12 2T
M U =
[ ] )382.2(8565.0
4
14
3
4
2465.0261.012 =
= T
The values in the bracket are the participation factors for
uniform support excitation.
For evaluating the acceleration response, the modal acceleration
at this frequency
can be obtained from the Fig. 6 as 2g and 1g at support 2 and
support 1 respectively. The
damping of piping considered is 2%. Now the acceleration
response at node 2 and 3 can
be obtained using Eq. 6 as follows.
1 1
nspn
j s ij si s
x X= =
= &&
Considering one mode, the response
)243.1(845.0261.028565.0261.01526.1..
2 ggggx =+=
)576.2(506.1465.028565.0465.01526.1..
3 ggggx =+=
The values in the bracket are evaluated considering uniform
excitation which is
basically coming from support 2 and corresponding spectral
acceleration is 2g. It is also
sometimes called envelope response spectrum analysis. It can be
clearly seen that
envelope response spectrum analysis gives conservative results
compared to the response
obtained in multiple support excitation analysis.
23
-
7/28/2019 04 Chapter 8
12/14
Case Study: 2
In general, dynamic analysis of a piping system subjected to
earthquake excitation is
performed using single-point response spectrum method. In a
single-point response
spectrum method, one response spectrum curve is specified at all
supports. This method
is acceptable as long as the piping system is single or multiple
supported system,
subjected to uniform translational excitations at all its
support points. This is true for a
piping system attached to one floor of a building or structure
via some passive devices
such as anchors. In case of a piping system supported at
different floor levels or in
different building structures, each support point (or group)
would experience a different
excitation. The current practice is to assume a set of envelope
response spectra which
encompasses all the input excitations. This practice gives very
conservative results as we
can see in previous case. But in case of overhang in the piping
systems or equipments,
envelope response spectra may underestimate the response of the
system [5].
24
-
7/28/2019 04 Chapter 8
13/14
Analysis of a piping system with overhang as shown in Fig. 8 has
been
performed. Analysis has been performed for the two cases, one
using envelope response
spectrum and other using multiple support excitations. The
spectra at two support points
are shown in Fig. 9. Responses at various nodes of piping are
given in Table 2.
Table 2: Responses (Displacement) at various nodes of the
piping
Node Envelope ResponseSpectrum
Multiple SupportExcitations
41 9.37621 14.0785
40 8.31053 12.5642
39 7.24857 11.0525
38 6.19611 9.54808
37 5.16189 8.05796
It is clear from the Table 2 that Envelope Response Spectrum
analysis may
significantly underestimate the response of piping systems or
equipments with overhang.
References:
1. ASCE 4-98, Seismic Analysis of Safety-Related Nuclear
Structures and
commentary, Published by the American Society of Civil
Engineers, 1801
Alexander Bell Drive, Reston, Virginia 20191-4400.
25
Fig. 8: Piping System
Fig. 9: Response Spectra
All DOFs are
fixed
TranslationalDOFs are fixed
Node 41
Node 40
-
7/28/2019 04 Chapter 8
14/14
2. IAEA-TECDOC-1347, Consideration of external events in the
design of nuclear
facilities other than nuclear power plants, with emphasis on
earthquakes, March
2003.
3. C. W. Lin and E. Loceff, A new Approach to compute System
Response withMultiple Support Response Spectra Input, Nuclear
Engineering and Design, 60,
pp 345-352, 1980.
4. J. K. Biswas, Seismic Analysis of Equipment Supported at
Multiple Levels,
Proceedings of ASME Pressure Vessel and Piping Conference,
PVP-Vol.65,
Oriando, Florida, 1982.
5. A. Neelwarne, H. S. Kushwaha, A. Kakodker, Seismic
Qualification of Nuclear
Equipment under Multiple Support Excitations, SMiRT 11
Transactions Vol. K,
August 1991.
26