Embed Size (px)
Citation preview

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 1 | 30.06.2010

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 2 | 30.06.2010
WP3 – Enhanced algorithms - Overview
Algorithm development for GNSS mass-market receivers:
» Advanced algorithms for acquisition, tracking and related functionalities
» Implementation characteristics of the researched algorithms via simulations and prototyping of the selected algorithms
» Combination of location-related information from sensors, cellular network, and/or other wireless networks with GNSS receiver => Hybrid Data Fusion algorithms
» Algorithms integration & testing

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 3 | 30.06.2010
Outline of following slides
» GNSS» Sensor-related studies (sensors to be integrated further on with GNSS)» Signals of Opportunity (SoO): WLAN and Cellular-based positioning » Hybrid Data Fusion (HDF) of GNSS, available sensors and SoO» Summary

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 4 | 30.06.2010
GNSS STUDIESSimona Lohan, TUT

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 5 | 30.06.2010
Simulink model
» Common test platform for simulations (Simulink-based)» E1 Galileo receiver also available as open-source (www.cs.tut.fi/tlt/pos)» Common channel models for LOS/NLOS variation and urban/rural scenarios» Hardware-optimized VHDL implementations for the algorithms developed in
WP3200» Prototyping based on TUTGNSS receiver design» 3GPP-LTE transmitter and receiver testbed for hybrid positioning

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 6 | 30.06.2010
Channel model: Land Mobile Satellite (LMS) model
» Moving receiver» Multiple
tracks/satellite constellation
» Dynamic LOS model

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 7 | 30.06.2010
Acquisition engine
» Works above 35 dB-Hz; both CBOC and SinBOC(1,1) reference signals» Uses 4ms integration time (code epoch length). No additional non-coherent integration» Correlation is implemented in FFT domain
The decision variable is the ratio of peaks: Z=Max peak/(2nd max sufficiently apart)

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 8 | 30.06.2010
Advanced acquisition studies: Coherent DS-CDMA Acquisition in Time-Variant Channels
» Low signal to noise ratios (SNRs) in satellite navigation channels» Long signal delay » High power dampings
» SNR increase by suitable symbol averaging» Realistic time-variant channels require incoherent symbol averaging instead of
coherent symbol averaging: squaring loss
» Incoherent Correlator Output Averaging possible for time-variant channels, but squaring loss impairment at low signal to noise ratios
» Differentially-Coherent Correlator Output Averaging possible for time-variant channels, avoids the squaring loss impairment at low signal to noise ratios,but data rate dependent
» MUSIC: Coherent Estimation of Sample Covariance Matrix possible for time-variant channels, avoids the squaring loss impairment at low signal to noise ratios,and data rate independent

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 9 | 30.06.2010
Coherent DS-CDMA Acquisition in Time-Variant Channels
» Complexity of 1D MUSIC 50% less than incoherent and diff. coherent averaging

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 10 | 30.06.2010
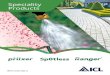
Advanced aquisition studies: ambiguities
» Unambiguous acquisition => getting rid of the ’notches’ in the correlation functionenvelope for CBOC/BOC signals
» Unambiguous versus ambiguous algorithms studied with and without bandwidth limitation
» Ambiguous + bandwidth limitation act similarly as unambiguous => selected for implementation
15 20 25 30 35 400
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
C/N0 [dB−Hz]
Pd a
t Pfa
=0.
001
CBOC(−) tx with ref BOC rx, (Δ t)bin
=0.5 chips, BW
=3 MHz
Pd
av
, ambig
Pd
av
, B&F, DSB
Pd
av
, UAL, DSB
Pd
av
, mM&H, DSB
Pd
worst
, ambig
Pd
worst
, B&F, DSB
Pd
worst
, UAL, DSB
Pd
worst
, mM&H, DSB
Example: 3 MHz bandwidth, CBOC(-) signal; UAL and mM&H curves are overlapping.

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 11 | 30.06.2010
Tracking engine(s)
»Several DLL discriminators have been implemented=> Switching between 7 code delay trackerspossibilities»Parkinson-based CNR estimator»Arctangent discriminators for FLL and PLL tracking»E1B (data) and E1C(pilot) separate outputs, then non-coherently combined»Correlation is done with the reference sine BOC(1,1) or CBOC-modulated codes

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 12 | 30.06.2010
Multipath tracking: why multi-correlator based structures?
Company Multipath mitigationalgorithm*
Number of complexcorrelators
Ashtech Strobe Correlator* 5
Cedar Rapids High ResolutionCorrelator (HRC)
5
Leica Narrow correlator 3
Magellan Strobe Correlator 5
NavSys Beam-steering multipath rejection
N/A
Novatel MEDLL , Vision Correlator, PAC, Early-Late Slope
4—tens
Septentrio APME 4
* Same as HRC
Multipath mitigation methods used in state-of-art GPS dual-frequency receiver
use typically no morethan 5 correlators.Target: keep a low-complexity delaytracking, while beingable to cope withmultipaths better thancurrent ’state-of-art’algorithms.

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 13 | 30.06.2010
Multi-correlator multipath delay trackers: MGD
» Multiple Gate Delay structures: pairs of early-late correlators with differentspacings, which are combined with optimized weighting factors in order to form the discriminator. Currently: up to 7 complex correlators 1 in-prompt, 3 early and 3 late)
1 2 3( ) ( ) ( )E E L L VE VE VL VL VVE VVE VVL VVL
E E L L
a I Q I Q a I Q I Q a I Q I QD
I Q I Q
» Optimum coefficients a1, a2, a3 depend on early-late spacings and modulation type.» They were found based on ideal Multipath Error Envelopes, by minimizing the
enclosed MEE areas, under various channel profiles. E.g., for 0.08 chip early-latespacing, a1=1, a2=-0.6, a3 =0.1
» Performance comparable with HRC; only advantage: un-patented solution.

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 14 | 30.06.2010
Multi-correlator multipath delay trackers: SBME/MAPME
» Slope-Based Multipath Estimator (SBME) and Modified A Posteriori Multipath Estimator (MAPME): starting from an idea of APME (Septentrio), which is limited to BPSK modulation.
» 2-stage estimator: a narrow correlator, plus a multipath (MP) estimator
Modified APME (MAPME): suited also for MBOC; it takes the main lobe slope into account
SBME is a slightly modified version of MAPME:

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 15 | 30.06.2010
Comparison results, various delay tracking structures
15 20 25 30 35 40 45 50 55 6010
-1
100
101
102
103
CNR [dB-Hz]
RM
SE [m
]
Path delay=[1 5]samples
nEMLHRC2 stage HRCMGD2 stage HRCDot productSBME
Loss of Lock

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 16 | 30.06.2010
SENSORSSimona Lohan, TUT

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 17 | 30.06.2010
Sensor studies: Properties of different IMU grades
Grade Cost Accuracy Applications
Marine 1 M€ Drift < 1.8 km / day Ships, submarines, some space crafts
Aviation(navigation)
100 k€ Drift < 1.5 km in the 1st hour
Commercial airliners, military aircrafts
Intermediate 20-50 k€ Drift 15 km in the 1st hour
Small aircrafts, helicopters
Tactical 5-20 k€ Useful stand-alone solution for a few minutes
Guided weapons, unmanned air vehicles
Automotive Accelerometers 1 €, gyros 10 €.
Too inaccurate for inertial navigation, can be used in AHRS or PDR.
Pedometers, antilock braking systems, airbags
Useful when integrated with other systems, such as GNSS
Even integration does not help enough in accuracy Cost suitable for mass market applications
Source: P. D. Groves, “Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems”, Artech House, 2008.

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 18 | 30.06.2010
Positioning cart • Frame out of plywood• Two turning and two fixed wheels
Measurement wheels•Mounted using spring arms•Two quadrature incremental encoders•Forwards and backwards movement
SCC1300 gyro• Bias stability <1 deg/h• Price 100 €

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 19 | 30.06.2010
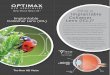
Test drive with positioning cart: seven times back and forthResults: estimated track on floor plan
Just before test drive:three repeats of gyro calibrations» Bias: 1 min stop » Scale factor: 3 full circles turn to
both directions
Position computation from» Test drive data
» Timestamps and gyro readings
» Encoder counts of both wheels
» Scale factors (computed earlier)» Initial coordinates -5 0 5 10 15 20 25 30 35
25
30
35
40
45
50
55
x (m)
y (m
)
Stoppinglocations
Positioning accuracy of the test drive approx. 30 cm during 1000 m

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 20 | 30.06.2010
SIGNALS OF OPPORTUNITY: WLAN AND CELLULAR-BASED POSITIONING
Emanuel Staudinger, DLR

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 21 | 30.06.2010
WLAN: RSSI-based positioning
» Filtered case (Hiden Markov Models) versus non-filtered case fingerprinting» Walk test: straight line, 30 s stops in the beginning and in the end
Without filteringIn stops: RMSE = 12.5 m
HMMIn stops: RMSE = 4.1 m
-5 0 5 10 15 20 25 30 35 40 450
5
10
15
20
25
30
35
40
x (m)
y (m
)
WallsGrid pointsObstacles
-5 0 5 10 15 20 25 30 35 40 450
5
10
15
20
25
30
35
40
x (m)
y (m
)
WallsGrid pointsObstacles
Walkingline

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 22 | 30.06.2010
10 MHz
Positioning with 3GPP-LTE Core System Parameters
» Frequency reuse 1» Bandwidth 1-20 MHz » OFDM system:
15kHz subcarrier spacing» FDD radio frame» Adaptive bit-interleaved
coded modulation (BICM) 1MHz
10 ms, 10 subframes1 subframe
Primary synchronizationsignal
Secondarysynchronizationsignal
Cell specificreference signal
Positioning reference signal
DataControl signals
5 ms

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 23 | 30.06.2010
Positioning with 3GPP-LTE Status of Standardization
» Main driver: FCC E-911 requirements» Methods agreed on
» Observed (OTDOA)» Enhanced cell ID: Cell ID, RSS, timing advance, AoA, » A-GNSS
» Methods still under discussion» Network-based uplink-
» Signals and Protocols» Positioning reference signal (PRS)
» Includes idle period to improve hearability» Frequency reuse of 6» Periodicity: 160 ms, 320 ms, 640 ms, and 1.28 s
» LTE positioning protocol (LPP)
Novelty in communication standards
All cellular methods support TDOA, generally best accuracy
TDOATDOA
TDOA

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 24 | 30.06.2010
Positioning with 3GPP-LTE Principle
» Time difference of arrival (TDOA)» Measures the time difference of
signals received from various Base stations (BSs)
» No full synchronization betweenMS and BS network necessary
» MS lies on hyperbolas with foci at the two related BSs
» At least three BSs have to be visible

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 25 | 30.06.2010
3GPP Long Term Evolution (LTE): Transmitters
» Generic transmitter system needed (baseband and RF) to emulate communication systems» Transmit OFDM modulated signals:
» WLAN, 3GPP-LTE, WiMAX, etc.
» 4 base stations realized with 2 FPGA boards:» 20 MHz bandwidth, 32/64 symbols» CP, Nfft, Preamble fully variable» Variable symbol mapping» MATLAB interface
FPGA Baseband TX 1Digital Upconverter
FPGA Baseband TX 2Digital Upconverter
Synchronization (Sync)
60 MHz IF signal
FPGA Baseband TX 3Digital Upconverter
FPGA Baseband TX 4Digital Upconverter
2.4 GHz RF signal
PA
PA
PA
PA
Sync
Sync
OFDM SymbolCP OFDM Symbol OFDM SymbolCP OFDM SymbolCP....
t
Preamble Data

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 26 | 30.06.2010
3GPP Long Term Evolution (LTE): Receiver
» Generic receiver needed» Flexible hardware for algorithm testing and verification
» Sampling frequency up to 48 MHz at 14 bit resolution» I/Q and bandpass subsampling mode» Continous data storage up to 10 minutes» MATLAB interface to gather data blockwise
» Directly process raw data in MATLAB!
» COTS WiFi RF front end from MAXIM» Single chip solution for 2.4 GHz

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 27 | 30.06.2010
3GPP Long Term Evolution (LTE): Initial acquisition on real data
» Carrier Frequency Offset (CFO) isvery crucial
» Initial acquisition works on PSCH only Zadoff Chu codes
» Scattered pilots are very sensitive to CFO Can not be used High bandwidth
Correlation peaks ofpilots not visible

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 28 | 30.06.2010
HYBRID DATA FUSION (HDF)Christian Gentner, DLR

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 29 | 30.06.2010
Hybrid Data Fusion Algorithms
» A wide set of hybrid data fusion and position tracking algorithms available» Static solution» Positioning Kalman filter» Extended Kalman filter» Unscented Kalman filter» Particle filter
» Different type of sources can be handled» GPS» Galileo» 3GPP-LTE (OTDOAs)
» Allows a tight fusion of measurements of different systems» Study on non-line-of-sight (NLOS) mitigation

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 30 | 30.06.2010
Hybrid Positioning with GNSS and 3GPP-LTE NLOS Detection
GNSS: 24 satellites
No NLOS outliers due to conservative threshold» often less than 4 satellites» increased RMSE

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 31 | 30.06.2010
Hybrid Positioning with GNSS and 3GPP-LTE NLOS Detection
Using 3GPP-LTE in addition» decreases max. error» increases availability
GNSS + 3GPP-LTE

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 32 | 30.06.2010
Summary
» A Simulink-based common test platform has been being built. Currently only E1 full chain and E5a transmitter.
» Advanced acquisition methods have been investigated» Multi-correlator structures and advanced tracking and multipath mitigation for time-
variant channels have been investigated» A land mobile satellite channel model has been being updated to model realistic
GNSS channels» A gyro-based positioning cart has been built at TUT» WLAN-based measurements were partially analyzed in terms of positioning error» Preliminary results based for positioning with 3GPP-LTE have been obtained» HDF algorithms have been developed and are currently investigated with the
common realistic channel model
» More at www.gsa-grammar.eu

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 33 | 30.06.2010
Additional studies (I)
» Tracking studies: multipath mitigation: low complexity high resolution estimators (MUSIC, ESPRIT)
» Adaptive time-variant complexity-reduced multipath mitigation (CRMM); tracking directly on the signal subspaces, no recurrent eigenvalues decomposition (EVD)
» Model-order estimation according to the multipath profile through EVD of signal and noise subspace; alternating eigenvalues correspond to signal subspace
» Regarding CRMM, VHDL analysis showed that minimum 4 channel receiver (both for E1-B and E1-C) with 51 correlators/channel takes about 29% of FPGA resources
» Single-bit CBOC architectures have been also investigated» Additional performance criteria: tracking jitter, mean time to lose lock

© DLR ACO TUT 2011 | Enhanced Algorithms| ICL-GNSS, Tampere, Finland, June 29-30 2011 Page 34 | 30.06.2010
Additional studies (II)
» Dual-frequency ionospheric corrections algorithms have been proposed and investigated
» CNR estimators» Narrowband and wideband interference studies in GNSS» Optimum supression of squaring loss has been investigated» An NLOS detection & mitigation mechanism has been proposed.» LTE-based positioning algorithms (interference cancellation, CFO estimation) have
been implemented.» DLR LMS channel model was combined with WINNER model => realistic, coherent
simulation environment for GNSS, LTE, WLAN.
To be publicly available at the end of the project in Deliverable D3.2 throughwww.gsa-grammar.eu








![[Tut]How to Crack WPA_2-PSK W_ BT4 [Tut]](https://img.pdfslide.us/doc/110x75/577d28121a28ab4e1ea52a3b/tuthow-to-crack-wpa2-psk-w-bt4-tut.jpg)