Embed Size (px)
Citation preview
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
Rockwell CollinsCase Study: Damage Tolerance
June 12, 2008Damien Jourdan, Ph.D
Approved for public release, distribution unlimited
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
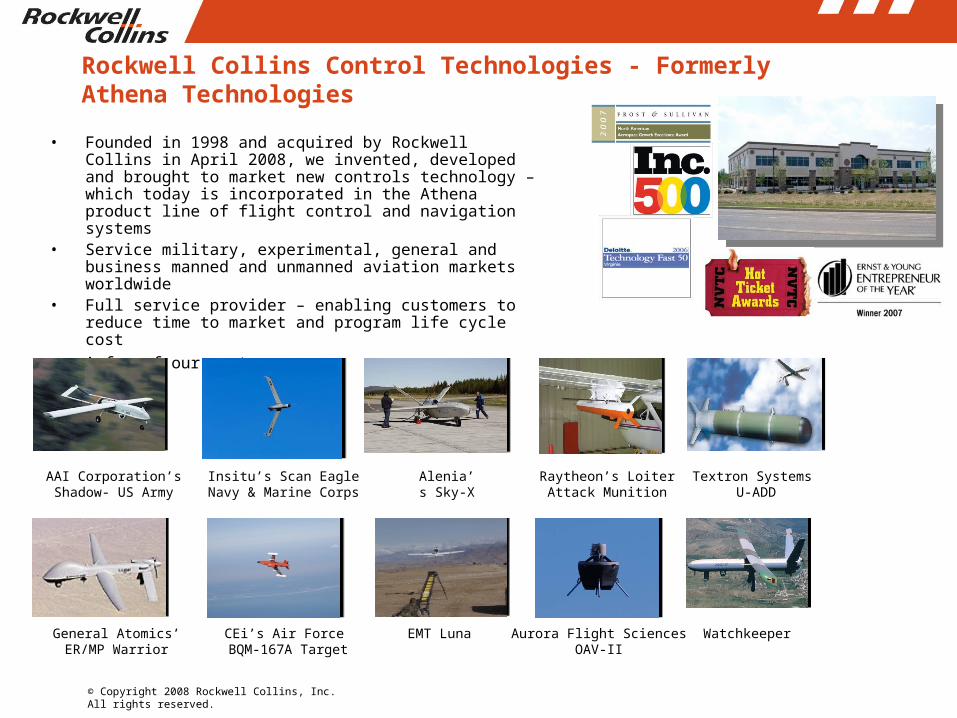
Rockwell Collins Control Technologies - Formerly Athena Technologies
• Founded in 1998 and acquired by Rockwell Collins in April 2008, we invented, developed and brought to market new controls technology – which today is incorporated in the Athena product line of flight control and navigation systems
• Service military, experimental, general and business manned and unmanned aviation markets worldwide
• Full service provider – enabling customers to reduce time to market and program life cycle cost
• A few of our customers:
General Atomics’ ER/MP Warrior
Alenia’s Sky-X
Insitu’s Scan EagleNavy & Marine Corps
AAI Corporation’sShadow- US Army
CEi’s Air Force BQM-167A Target
Aurora Flight SciencesOAV-II
WatchkeeperEMT Luna
Raytheon’s Loiter Attack Munition
Textron Systems U-ADD
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
Insert pictures into these angled boxes. Height should be 3.44 inches.
About Rockwell Collins
• A global company operating from more than 60 locations in 27 countries
• 20,000 employees on our team• A uniquely balanced business across markets we serve
— Government – 50% of sales— Commercial – 50% of sales
• $4.42 billion in sales (2007)
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
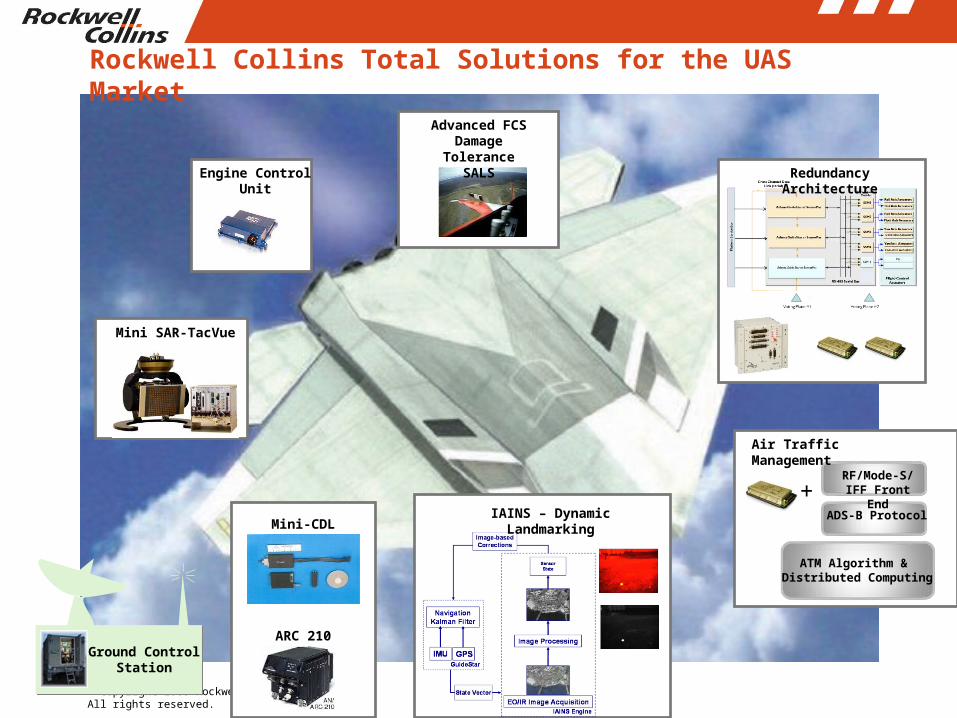
Rockwell Collins Total Solutions for the UAS Market
Ground Control Station
Redundancy ArchitectureEngine Control Unit
RF/Mode-S/IFF Front End
ADS-B Protocol
+
ATM Algorithm & Distributed Computing
Air Traffic Management
IAINS – Dynamic Landmarking
Mini SAR-TacVue
Advanced FCSDamage Tolerance
SALS
Mini-CDL
ARC 210
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
5
Damage Tolerance Case Study
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
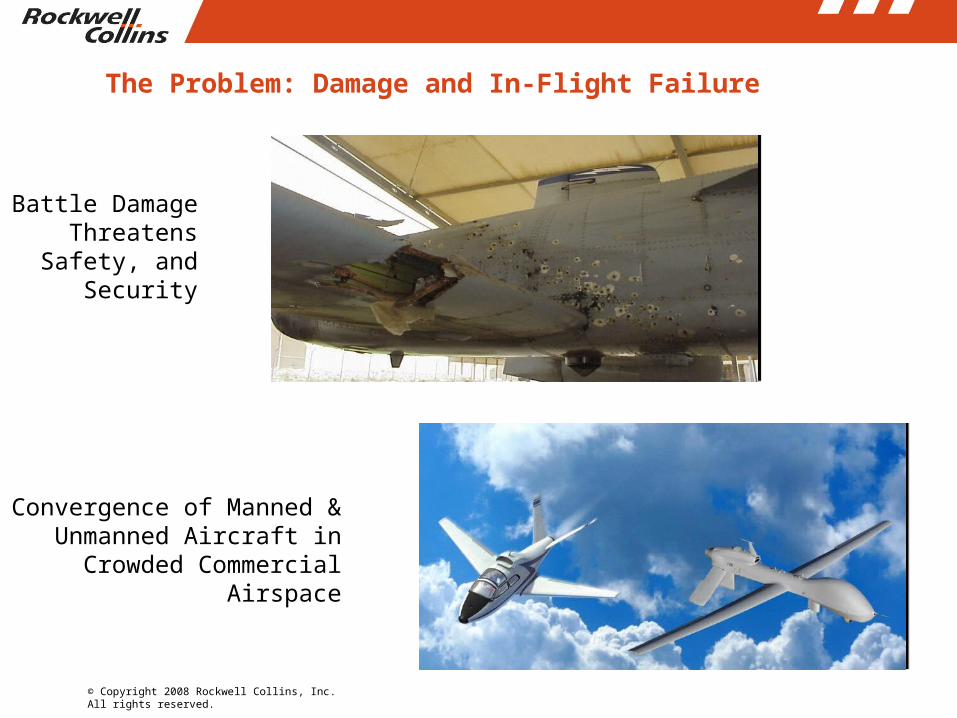
The Problem: Damage and In-Flight Failure
Battle DamageThreatens
Safety, and Security
Convergence of Manned & Unmanned Aircraft in Crowded Commercial
Airspace
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
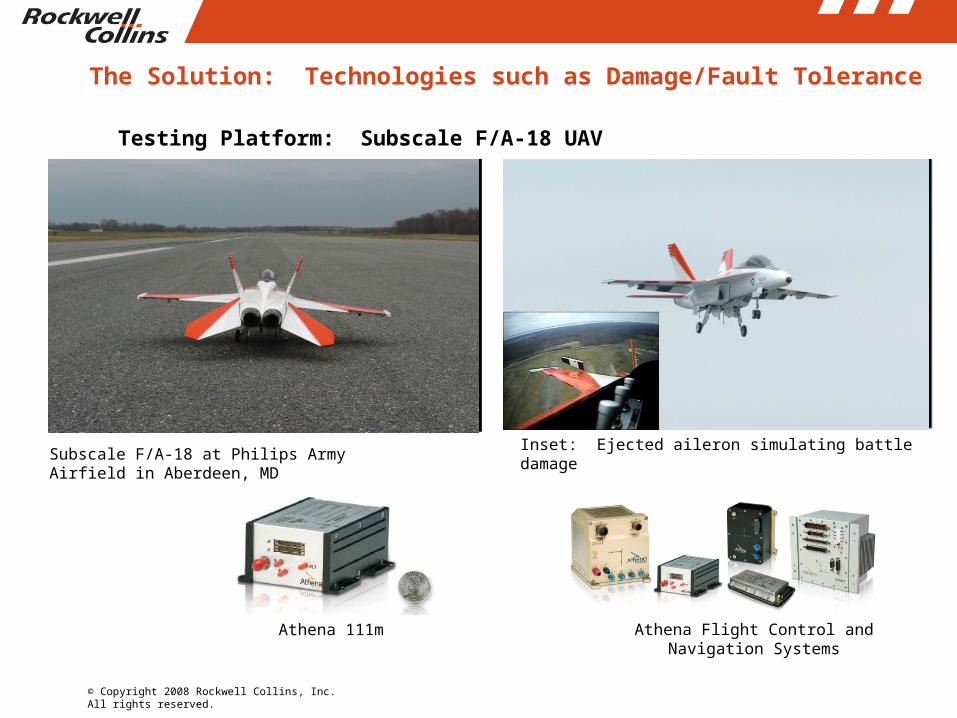
Inset: Ejected aileron simulating battle damage
The Solution: Technologies such as Damage/Fault Tolerance
Subscale F/A-18 at Philips Army Airfield in Aberdeen, MD
Testing Platform: Subscale F/A-18 UAV
Athena Flight Control and Navigation Systems
Athena 111m
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
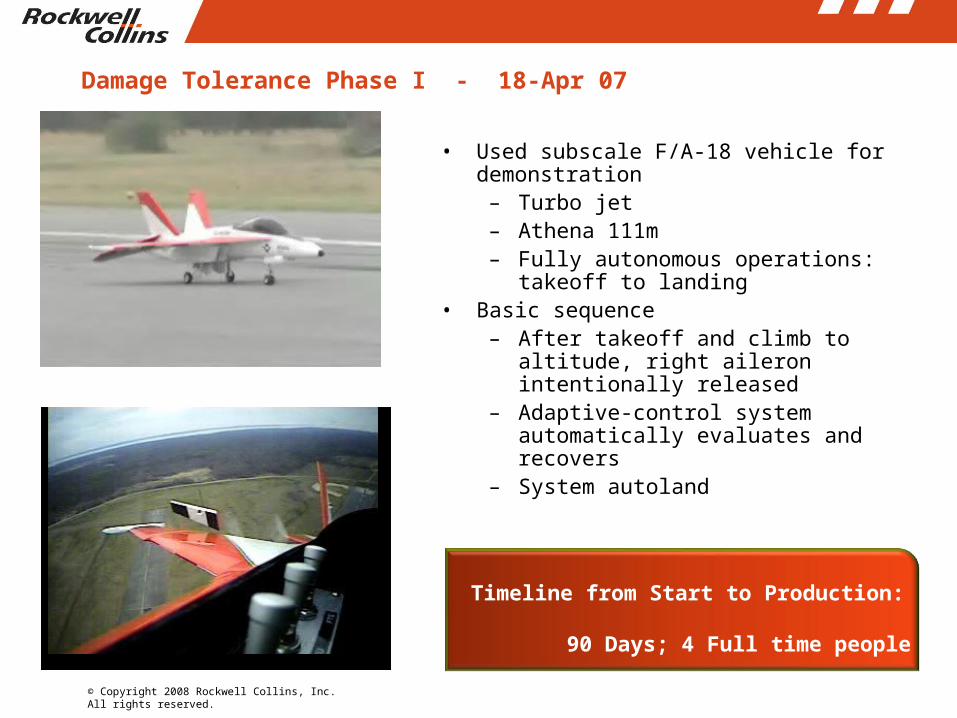
Damage Tolerance Phase I - 18-Apr 07
• Used subscale F/A-18 vehicle for demonstration– Turbo jet– Athena 111m– Fully autonomous operations:
takeoff to landing• Basic sequence
– After takeoff and climb to altitude, right aileron intentionally released
– Adaptive-control system automatically evaluates and recovers
– System autoland
Timeline from Start to Production: 90 Days; 4 Full time people
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
Damage Tolerance Phase II – More Damage - Greater Risk
9
2 Flight Tests at Aberdeen – April 08Basic sequence for both flights• Auto take off and climb to altitude• Ejection of 41% (area moment) of
wing during1st flight• Ejection of 60% (area moment) of
wing during 2nd flight• Introduced Automatic Supervisory
Adaptive Control (ASAC) technology which reacted to new vehicle configuration
• Automatically regained baseline performance
• Continued to fly the plane• System autoland using INS/GPS
reference only

© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
Flight 1 – 41% Wing Loss
10

© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
Flight 2 – 60% Wing Loss
11
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
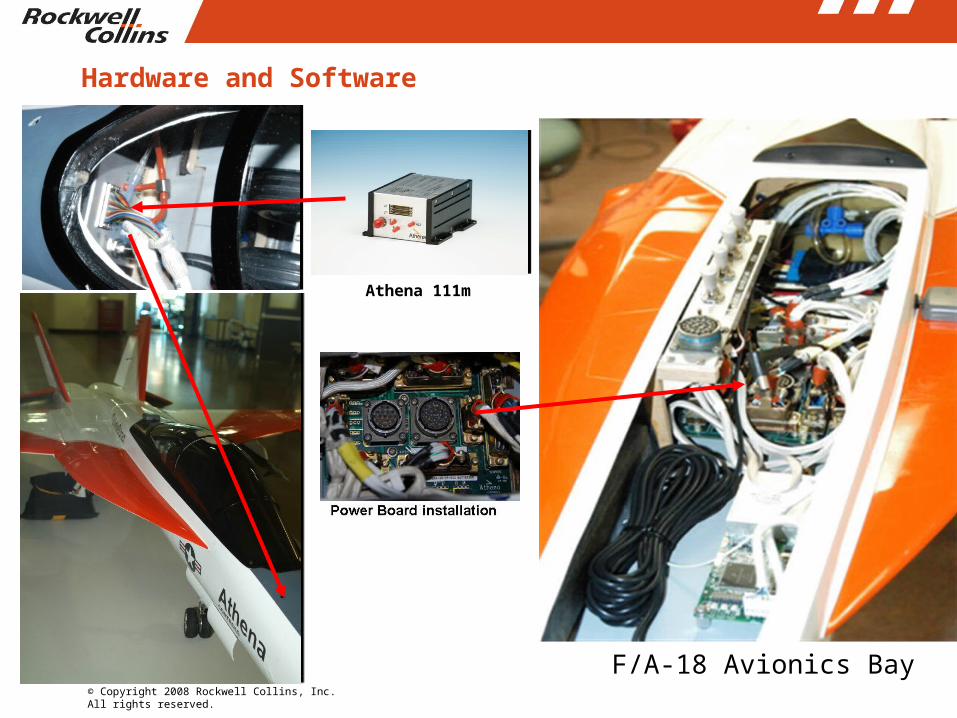
Hardware and Software
Athena 111m
F/A-18 Avionics Bay
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
Damage Tolerant Control overview (1)Damage Tolerant Control overview (1)
ASAC
Use aircraft attitude as actuator
ALL-ATTITUDE CONTROL
Desired quaternion
Body-axes attitude errors
INNERLOOP CONTROLLERS
MRACBaseline autopilots
EMERGENCY MISSION MANAGEMENT SYSTEM (EMMS)
Flight envelope restrictions
Dynamic re-planning
Aircraft health monitoring
Damage Tolerant Control
Emergency landing profiles
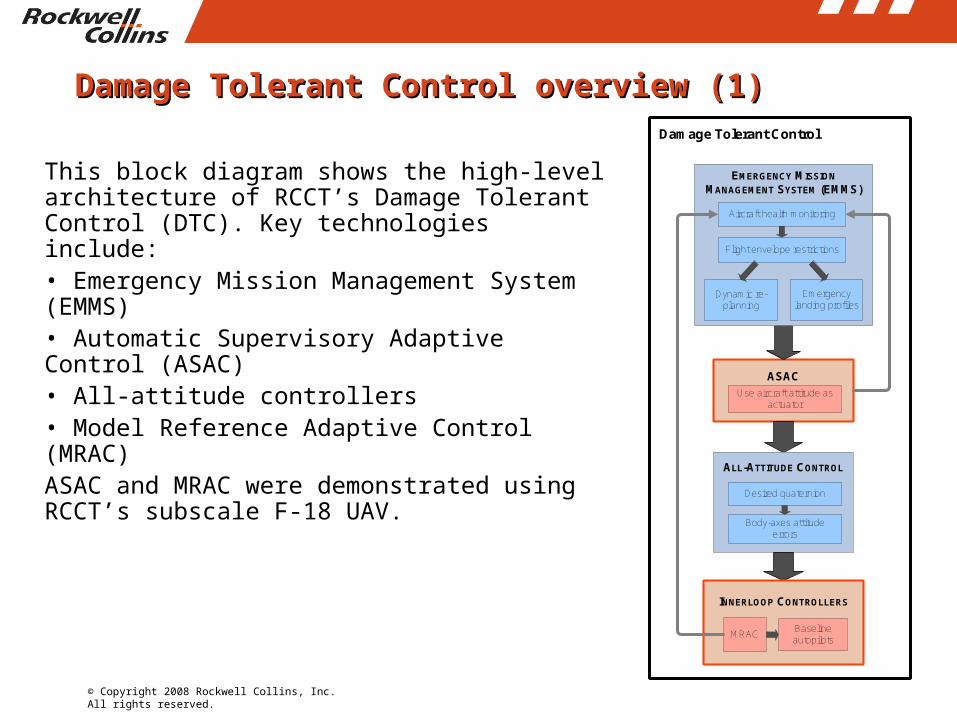
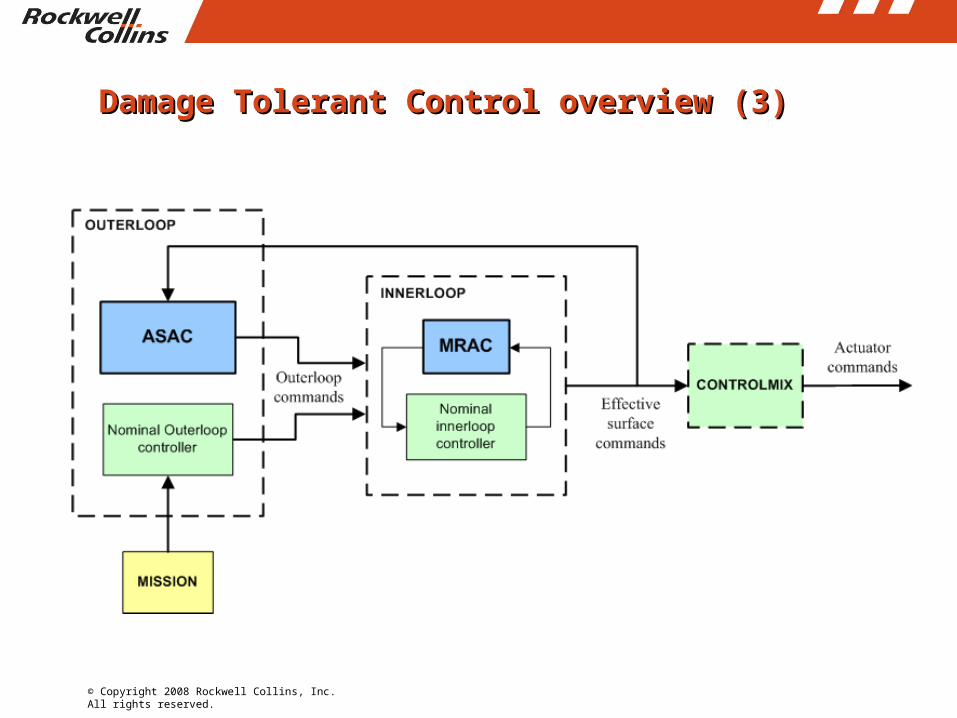
This block diagram shows the high-level architecture of RCCT’s Damage Tolerant Control (DTC). Key technologies include:• Emergency Mission Management System (EMMS)• Automatic Supervisory Adaptive Control (ASAC)• All-attitude controllers• Model Reference Adaptive Control (MRAC)ASAC and MRAC were demonstrated using RCCT’s subscale F-18 UAV.
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
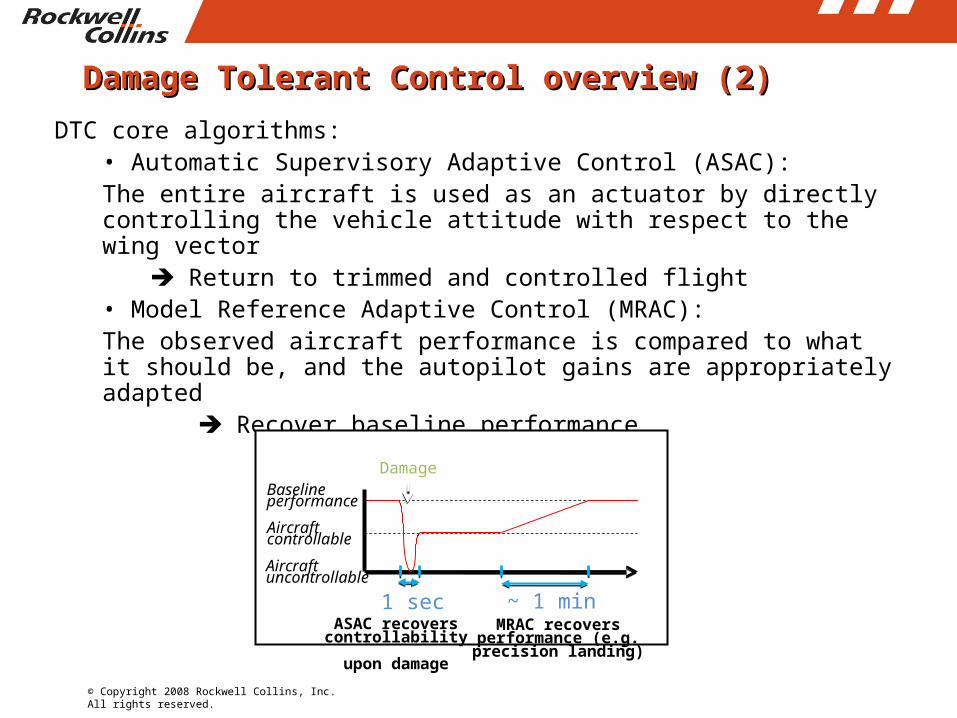
Damage Tolerant Control overview (2)Damage Tolerant Control overview (2)
DTC core algorithms: • Automatic Supervisory Adaptive Control (ASAC): The entire aircraft is used as an actuator by directly controlling the vehicle attitude with respect to the wing vector
Return to trimmed and controlled flight• Model Reference Adaptive Control (MRAC): The observed aircraft performance is compared to what it should be, and the autopilot gains are appropriately adapted
Recover baseline performance
Baseline performance
Aircraft controllable
Damage
1 sec
Aircraft uncontrollable
ASAC recovers controllability upon damage
MRAC recovers performance (e.g. precision landing)
~ 1 min
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
Damage Tolerant Control overview (3)Damage Tolerant Control overview (3)
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
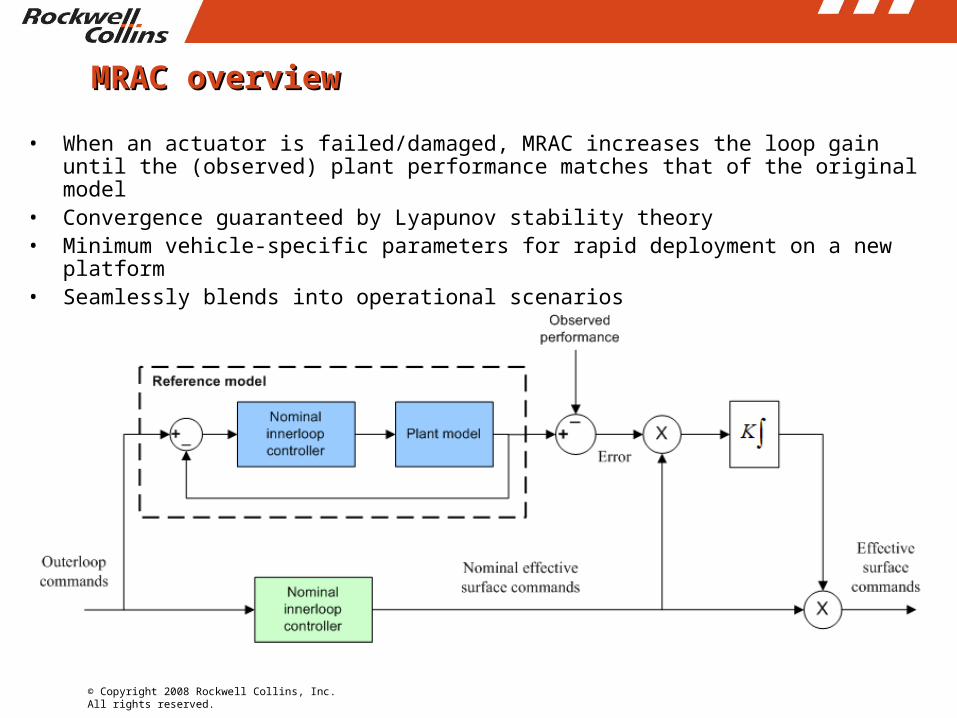
MRAC overviewMRAC overview
• When an actuator is failed/damaged, MRAC increases the loop gain until the (observed) plant performance matches that of the original model
• Convergence guaranteed by Lyapunov stability theory• Minimum vehicle-specific parameters for rapid deployment on a new platform• Seamlessly blends into operational scenarios
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
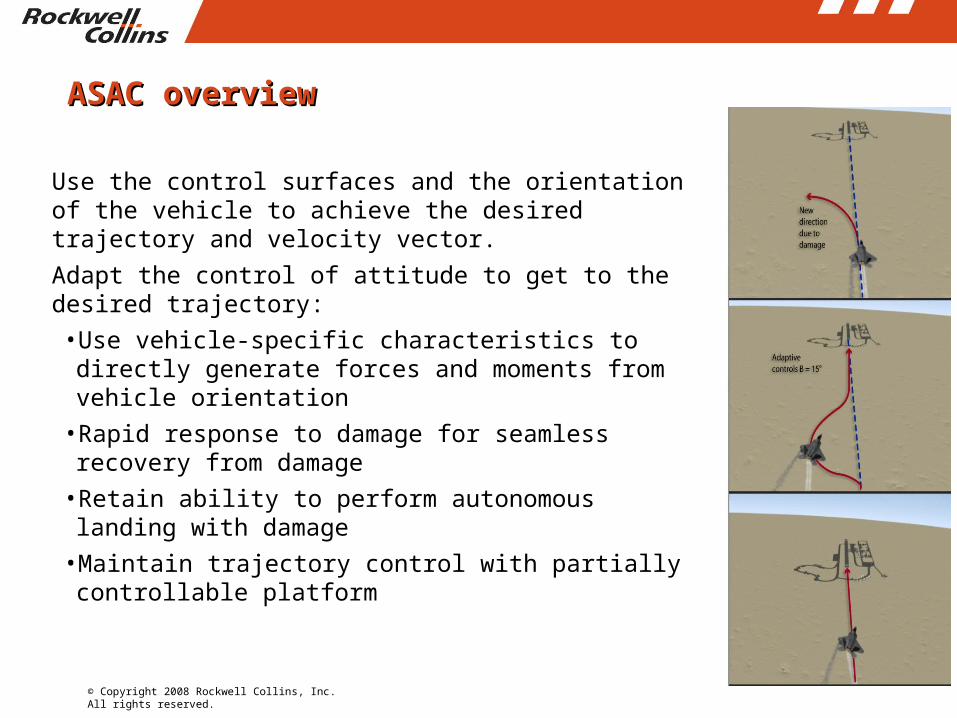
ASAC overviewASAC overview
Use the control surfaces and the orientation of the vehicle to achieve the desired trajectory and velocity vector.
Adapt the control of attitude to get to the desired trajectory:
•Use vehicle-specific characteristics to directly generate forces and moments from vehicle orientation
•Rapid response to damage for seamless recovery from damage
•Retain ability to perform autonomous landing with damage
•Maintain trajectory control with partially controllable platform
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
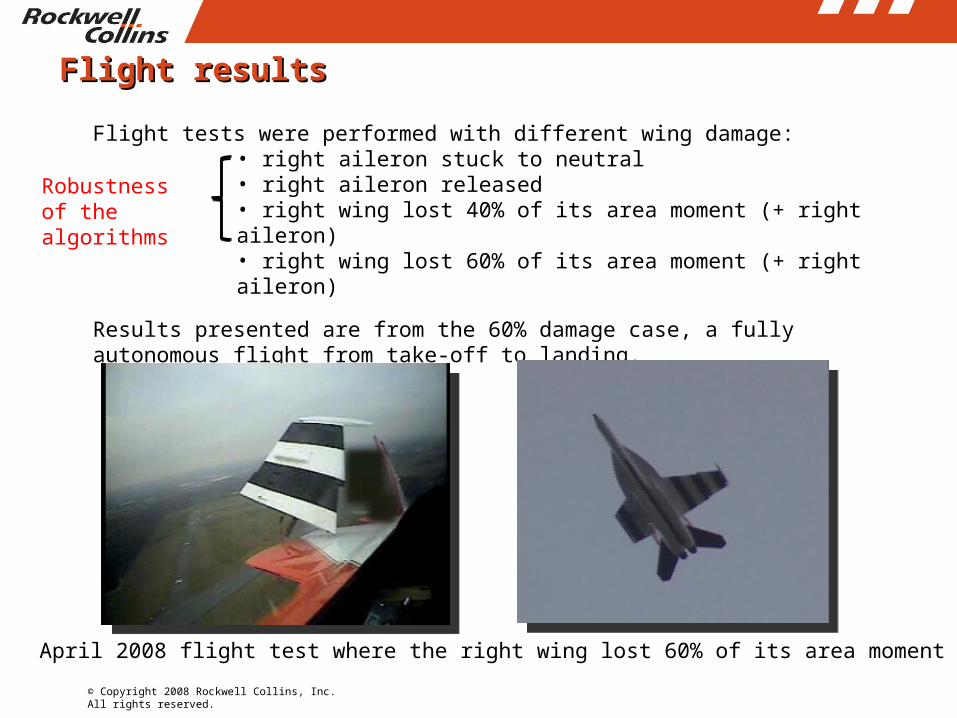
Flight resultsFlight results
Flight tests were performed with different wing damage:• right aileron stuck to neutral• right aileron released• right wing lost 40% of its area moment (+ right aileron)• right wing lost 60% of its area moment (+ right aileron)
Results presented are from the 60% damage case, a fully autonomous flight from take-off to landing.
April 2008 flight test where the right wing lost 60% of its area moment
Robustness of the algorithms
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
570 580 590 600 610 620 630
-10
0
10
ASAC without MRAC, Standard Deviation = 4.1 deg
Ro
ll E
rro
r, d
eg
760 770 780 790 800 810 820
-10
0
10
ASAC with MRAC, Standard Deviation = 2.4 deg
Ro
ll E
rro
r, d
eg
Time, sec
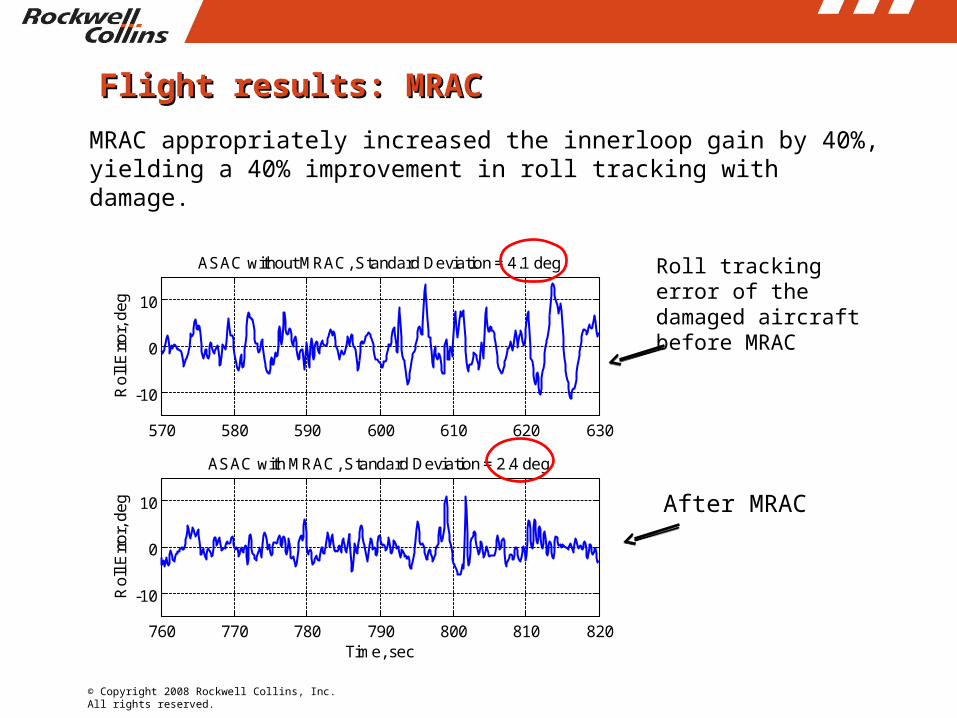
Flight results: MRACFlight results: MRAC
MRAC appropriately increased the innerloop gain by 40%, yielding a 40% improvement in roll tracking with damage.
Roll tracking error of the damaged aircraftbefore MRAC
After MRAC
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
445 450 455 460 465 470-25
-20
-15
-10
-5
0
5
Aile
ron
, de
g
Time, sec
Effective Aileron Command
445 450 455 460 465 470-30
-20
-10
0
10
20
30
40
50
60
Ro
ll, d
eg
Time, sec
Roll Tracking
Roll CommandRoll
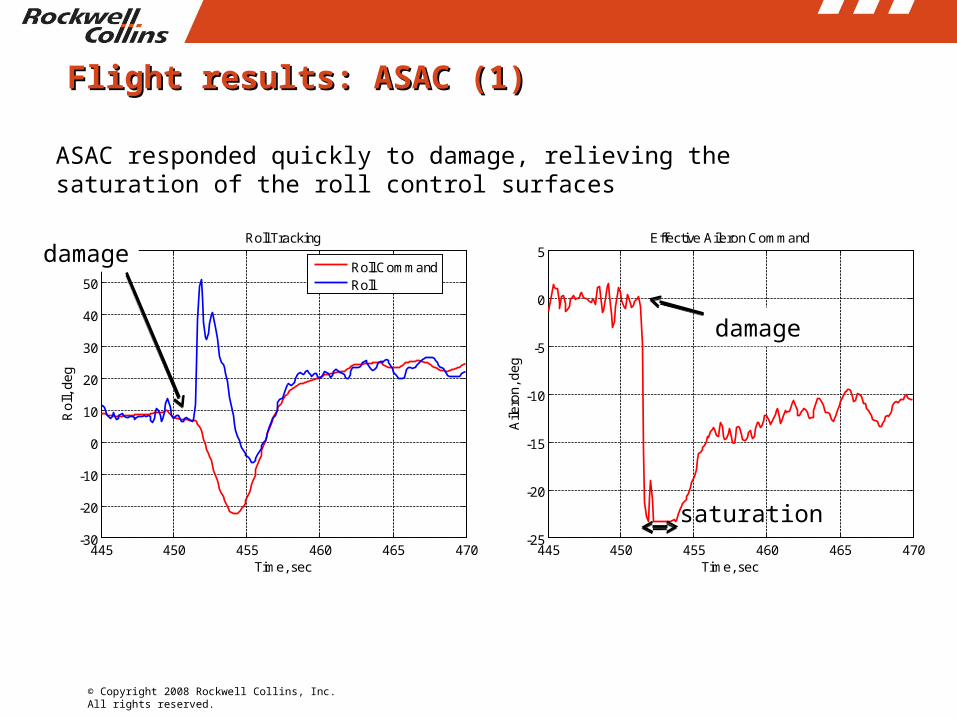
Flight results: ASAC (1)Flight results: ASAC (1)
ASAC responded quickly to damage, relieving the saturation of the roll control surfaces
saturation
damage
damage
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
600 650 700 7500
50
100
150
200
250
300
Alti
tud
e, m
Time, sec
Altitude Tracking
Altitude CommandAltitude
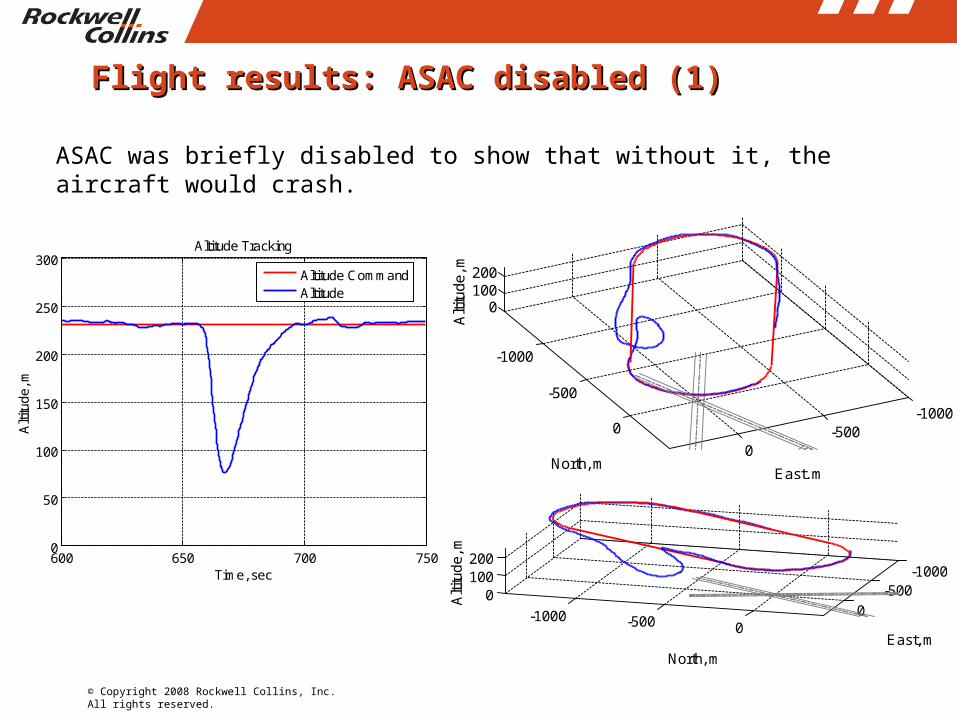
Flight results: ASAC disabled (1)Flight results: ASAC disabled (1)
ASAC was briefly disabled to show that without it, the aircraft would crash.
-1000-500
0-1000 -500 0
0100200
East, mNorth, m
Alti
tud
e, m
-1000-500
0
-1000
-500
0
0100200
East, mNorth, m
Alti
tud
e, m
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
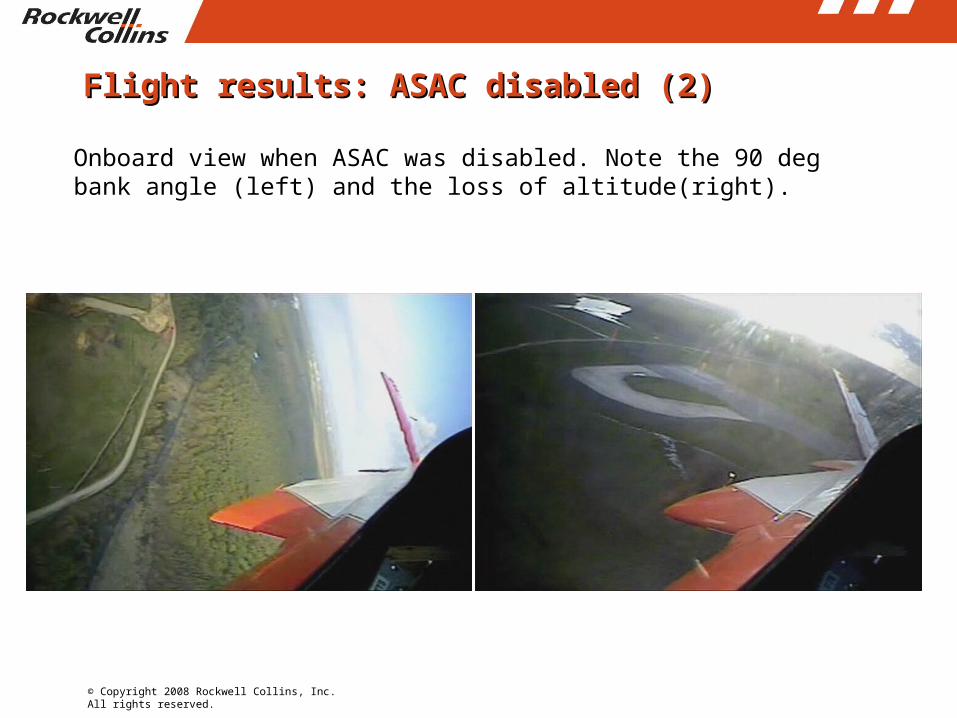
Flight results: ASAC disabled (2)Flight results: ASAC disabled (2)
Onboard view when ASAC was disabled. Note the 90 deg bank angle (left) and the loss of altitude(right).
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
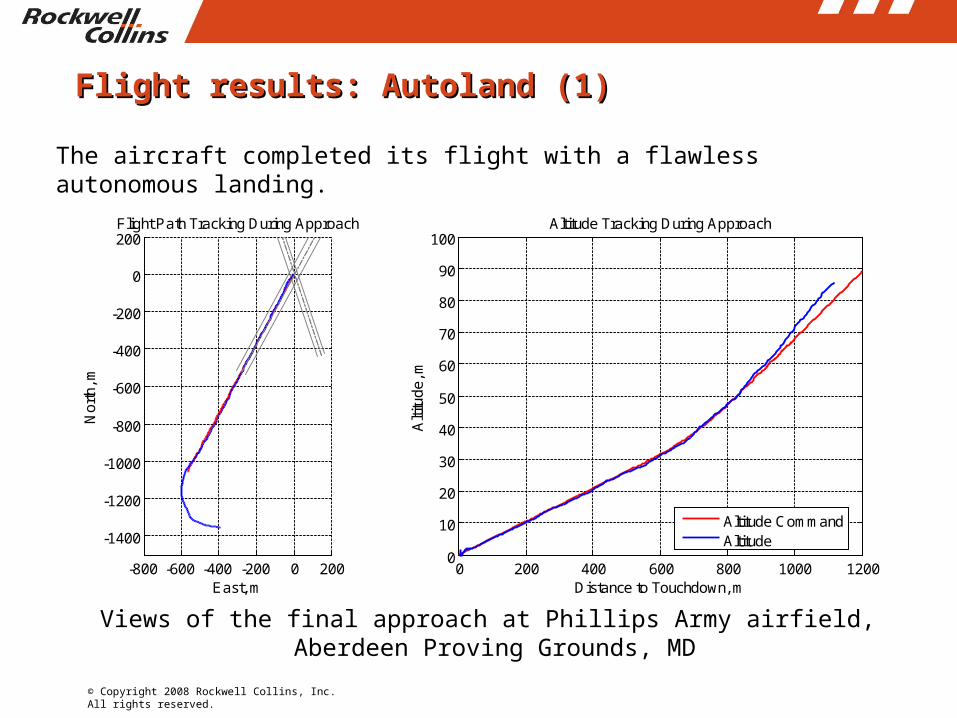
Flight results: Autoland (1)Flight results: Autoland (1)
The aircraft completed its flight with a flawless autonomous landing.
Views of the final approach at Phillips Army airfield, Aberdeen Proving Grounds, MD
-800 -600 -400 -200 0 200
-1400
-1200
-1000
-800
-600
-400
-200
0
200
East, m
Flight Path Tracking During Approach
No
rth
, m
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
100
Alti
tud
e, m
Distance to Touchdown, m
Altitude Tracking During Approach
Altitude CommandAltitude
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
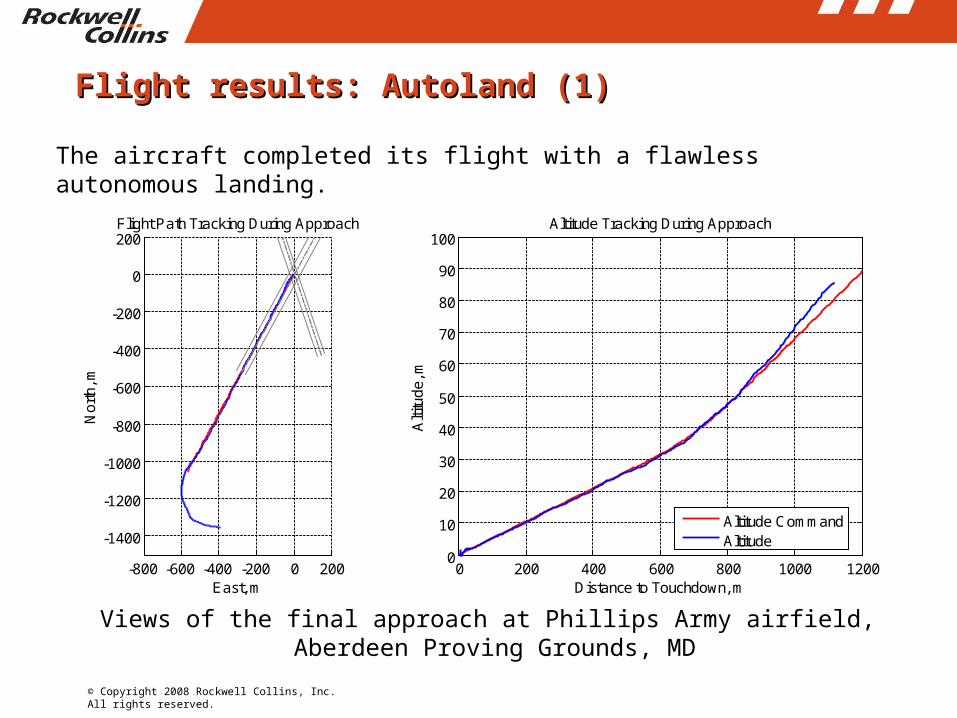
Flight results: Autoland (1)Flight results: Autoland (1)
The aircraft completed its flight with a flawless autonomous landing.
Views of the final approach at Phillips Army airfield, Aberdeen Proving Grounds, MD
-800 -600 -400 -200 0 200
-1400
-1200
-1000
-800
-600
-400
-200
0
200
East, m
Flight Path Tracking During Approach
No
rth
, m
0 200 400 600 800 1000 12000
10
20
30
40
50
60
70
80
90
100
Alti
tud
e, m
Distance to Touchdown, m
Altitude Tracking During Approach
Altitude CommandAltitude
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
930 935 940 9450
5
10
Cro
sstr
ack
Err
or,
mCrosstrack Error During Approach
930 935 940 945-1
-0.5
0
0.5
1
Alti
tud
e E
rro
r, m
Time, sec
Altitude Error During Approach
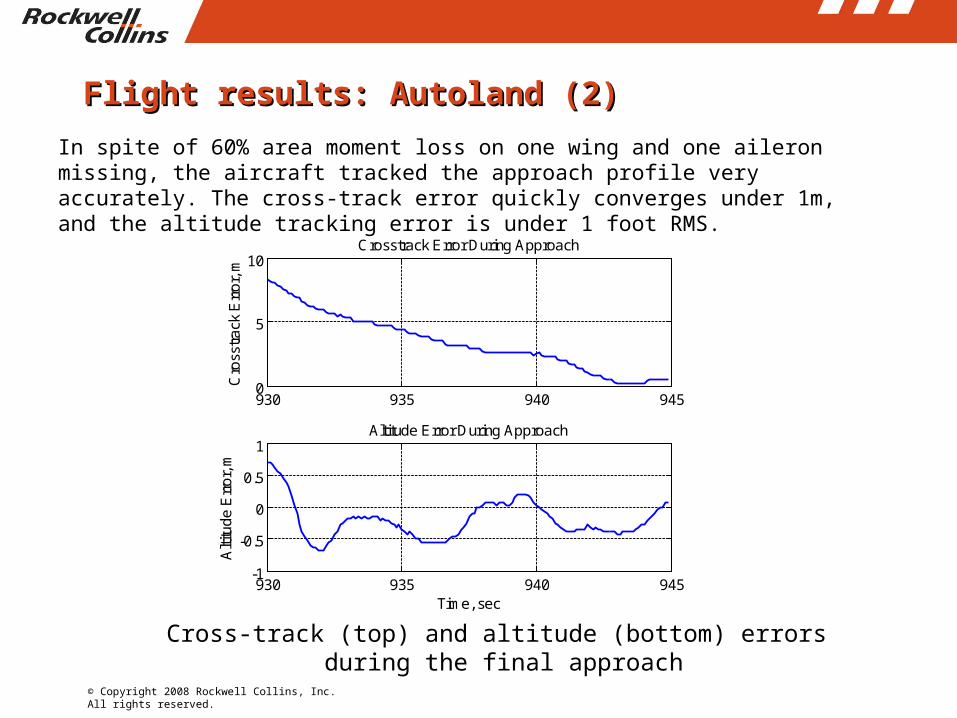
Flight results: Autoland (2)Flight results: Autoland (2)
In spite of 60% area moment loss on one wing and one aileron missing, the aircraft tracked the approach profile very accurately. The cross-track error quickly converges under 1m, and the altitude tracking error is under 1 foot RMS.
Cross-track (top) and altitude (bottom) errors during the final approach
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
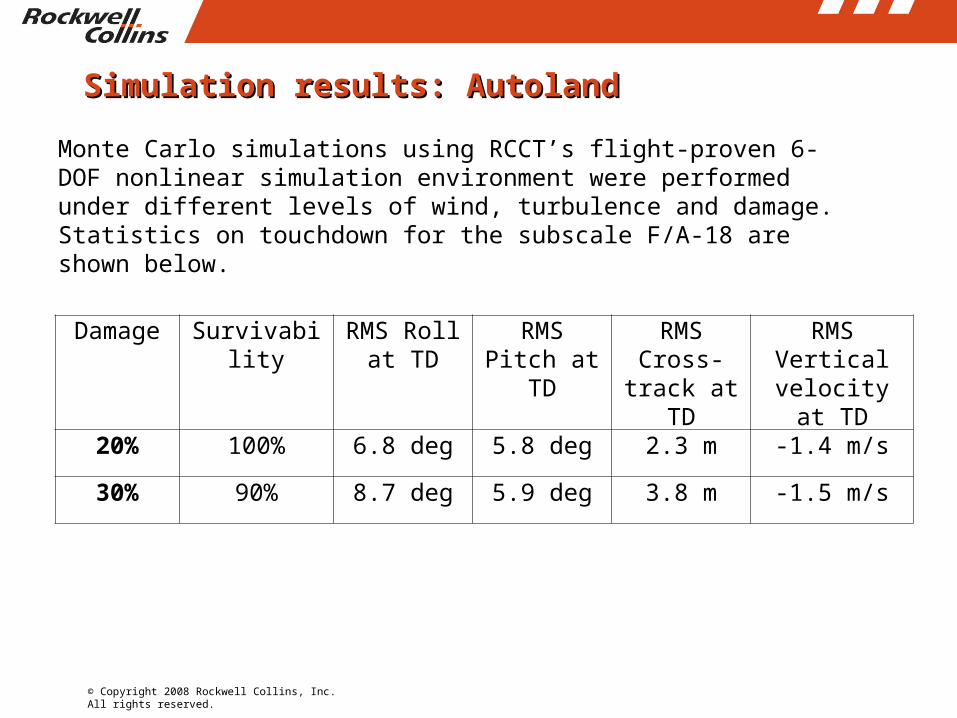
Simulation results: Autoland Simulation results: Autoland
Monte Carlo simulations using RCCT’s flight-proven 6-DOF nonlinear simulation environment were performed under different levels of wind, turbulence and damage. Statistics on touchdown for the subscale F/A-18 are shown below.
Damage Survivability RMS Roll at TD
RMS Pitch at TD
RMS Cross-track at TD
RMS Vertical velocity at TD
20% 100% 6.8 deg 5.8 deg 2.3 m -1.4 m/s
30% 90% 8.7 deg 5.9 deg 3.8 m -1.5 m/s
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
The Results
• Military Manned and Unmanned Aircraft– Ability to reduce loss of UAVs and manned aircraft in
combat– Security of US sensitive technologies– Facilitates greater use of UAVs in high threat operations –
saves lives and reduces costs– Combined with flight control redundancy; improves
reliability exponentially• Civilian Manned and Unmanned Aviation
– Can be used on aircraft for fault tolerance– Can be used by pilots for upset recovery – Can be used by pilots and passengers for panic button
autoland– Combined with Rockwell Collins sense and avoid
technologies, provides complete solution and facilitates convergence of manned and unmanned aviation in commercial airspace
27
© Copyright 2008 Rockwell Collins, Inc. All rights reserved.
For more information, visitwww.rockwellcollins.com or contact [email protected]




























