Embed Size (px)
Citation preview

삼차원 측정기
(3 Dimension Coordinate Measuring Machine)
1. 개요
1) 삼차원 측정기란:주로 측정 점 검출기(PROBE)가 서로 직각인 X,Y,Z축 방
향으로 운동하고 피 측정 물 측정 점 이 공간 좌표 값을 측정치에 의해 읽
어 들여 위치,거리, 윤곽,형상 등을 측정하는 만능 측정기를 말합니다.
2. 삼차원 측정기의 분류.
삼차원 측정기는 크게 접촉과 비접촉으로 나뉘우고 세부사항으로 몇 가지
로 더 분류를 합니다.
1). 측정값 읽음 방식에 의한 분류
아날로그(Analog) 방식
디지털(Digital) 방식
절대(Absolue) 방식
증가(Increment) 방식
2). 조작상의 분류
매뉴얼식 삼차원 측정기(Floating기):클램프 해제 상태에서 X,Y,Z추의 각
구동부를 사람의 힘으로 이동해서 측정을 행하는 측정기
Motor Drive식 삼차원 측정기(Joystick기):X,Y,Z축에 구동 원으로 모터가
내장되어 원격조작으로 각 운동부의 움직임을 제어하여 측정을 행하는 측정
기
CNC식 삼차원 측정기:X,Y,Z축의 구동 원으로 Motor를 가지고 미리 작
성된 프로그램에 따라 컴퓨터에 의해 지령이 내려져 측정이 자동적으로 수
행되는 측정기
3). 구조 형태상의 분류
브리지 문 이동형: 가장 일반적으로 사용하는 형태로 테이블 개방형이라 제
품을 놓기에 유리하나 빠른 측정을 하면 반복성과 정확성에 문제가 생김
고정 브리지형: Y축 방향으로 테이블이 움직이므로 높은 정확 도를 얻을
수 있으나 피측정 물이 Y축 방향으로 이동하기 때문에 수동식에 사용이 불
가하고 피측정 물에 중량이 제한 됩니다.

브리지 베드형: 중소형에 적합하며 브리지 문 이동형보다 높은 정밀도를
얻을 수 있으나 Y축 가이드의 변형에 대한 보상이 필요하며 측정물의 설치
및 해체에 어려움이 있어 요즘은 거의 사용하니 않습니다
L형 브리지형: 문 이동형보다 가볍고 관성이 적어 조작성은 다소 양호하
지만 각부의 강도를 높게 하면 중량이 증가하기 때문에 정도유지나 경년 변
화 등에 충분한 유지가 필요합니다.
캔틸레버형: 소형 타입에 전체 개방형으로 가격이 저렴하나 소형 타입에
만 사용할 수 있다는 단점이 있습니다.
브리지 플로어형(갠 트리 타입): 중 대형 장비에 많이 쓰이며 고 반복성과
스피드가 빠른 반면 개방성이 없어 시야확보나 제품을 올리고 내리는 게 용
이하지 않습니다.
싱글 칼럼 이동형: 측정 테이블과 칼럼 등이 강성이 높아 변형이 거의 없
으며 기하학적을 높은 정밀도를 얻을 수 있으나 피측정 물과 프로브의 양쪽
을 움직이면서 측정하는 구조이기 때문에 매뉴얼 조작이 곤란합니다.
싱글 칼럼 XY 테이블형:소형타입이며 매뉴얼 조작이 힘들어 유지가 어려
워 그다지 사용되지 않습니다.
수평 암 테이블 이동형: Z축 방향 암의 휨 정도가 한단계 낮아지는 결점을
제거하기 위해 고안된 구조로 소형 타입이며 매뉴얼 타입으로 적합하지 않
습니다.
수평 암 고정 테이블형: 대용량 제품의 측정이 가능하지만 제조상이나 보
수 유지가 곤란한 결점이 있습니다.
수평 암형:측정기 본체는 피측정 물에 비해 비교적 소형이며 가격이 저렴
합니다.하지만 Z축 암의 이동으로 고정도 에는 적합하지 않은 타입 입니다.

3. 삼차원 측정기의 구조
1.)삼차원 측정기 콘트롤러,PC 및 소프트웨어: 일반적인 기본 컴퓨터 set에
컨트롤러가 내장되어 있어 기존에 외 장형 컨트롤러를 탈피하여 협소한
공간이나 프로그램 사용에 편리 합니다. PC내에 프로그램을 설치하여 다
른 업무와 호환이 가능합니다.
2.)삼차원 측정기 TOP: 삼차원 측정기의 중요 부분 이며 구조형태에 따라
많은 분류로 나뉘어 지며 여러 가지 보 정을 취한 뒤 정 반위에 올려 사
용을 합니다.
3.)프로브: 피측정 물의 좌표 위치를 검출하는 장치로서 크게 접촉식과 비접
촉식으로 나누어집니다.
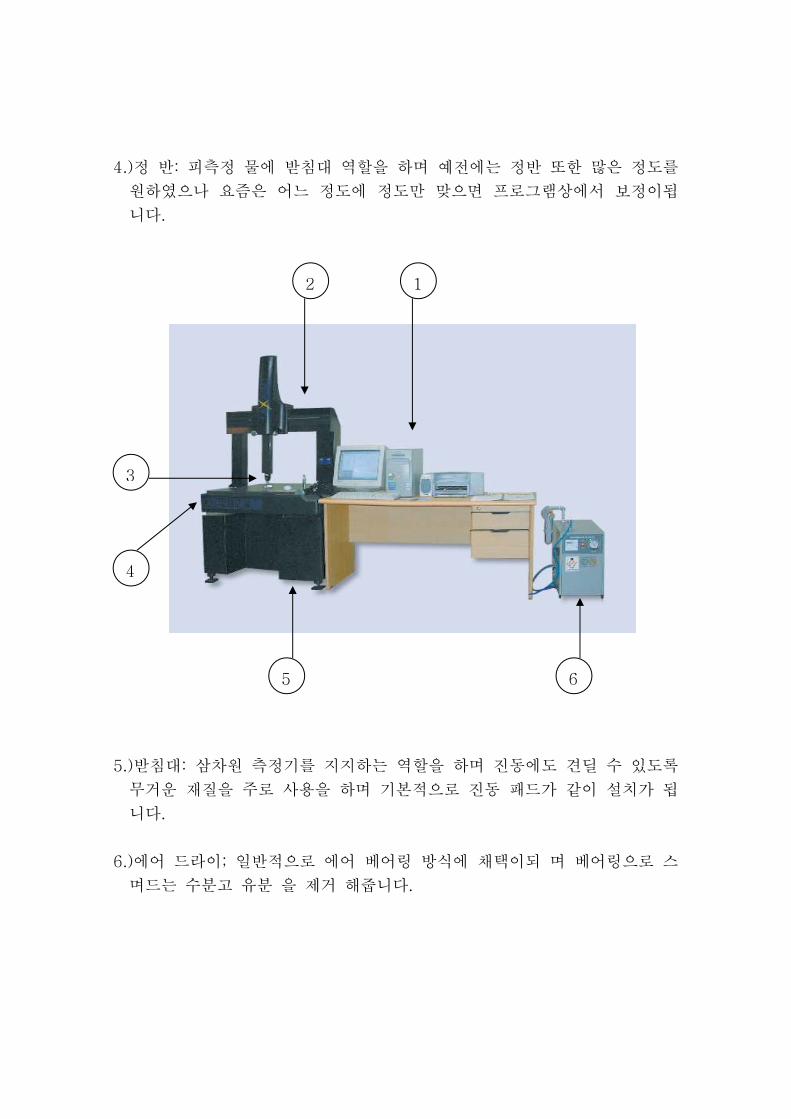
4.)정 반: 피측정 물에 받침대 역할을 하며 예전에는 정반 또한 많은 정도를
원하였으나 요즘은 어느 정도에 정도만 맞으면 프로그램상에서 보정이됩
니다.
5.)받침대: 삼차원 측정기를 지지하는 역할을 하며 진동에도 견딜 수 있도록
무거운 재질을 주로 사용을 하며 기본적으로 진동 패드가 같이 설치가 됩
니다.
6.)에어 드라이; 일반적으로 에어 베어링 방식에 채택이되 며 베어링으로 스
며드는 수분고 유분 을 제거 해줍니다.
2 1
3
4
5 6
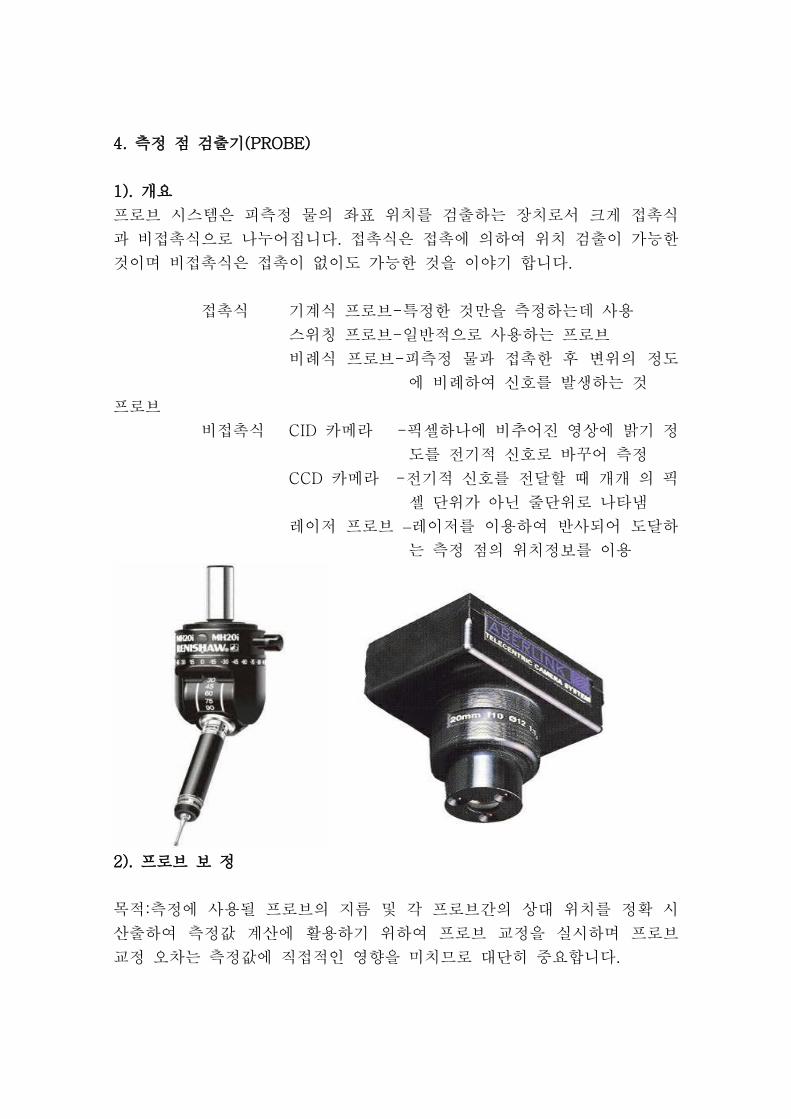
4. 측정 점 검출기(PROBE)
1). 개요
프로브 시스템은 피측정 물의 좌표 위치를 검출하는 장치로서 크게 접촉식
과 비접촉식으로 나누어집니다. 접촉식은 접촉에 의하여 위치 검출이 가능한
것이며 비접촉식은 접촉이 없이도 가능한 것을 이야기 합니다.
접촉식 기계식 프로브-특정한 것만을 측정하는데 사용
스위칭 프로브-일반적으로 사용하는 프로브
비례식 프로브-피측정 물과 접촉한 후 변위의 정도
에 비례하여 신호를 발생하는 것
프로브
비접촉식 CID 카메라 -픽셀하나에 비추어진 영상에 밝기 정
도를 전기적 신호로 바꾸어 측정
CCD 카메라 -전기적 신호를 전달할 때 개개 의 픽
셀 단위가 아닌 줄단위로 나타냄
레이저 프로브 –레이저를 이용하여 반사되어 도달하
는 측정 점의 위치정보를 이용
2). 프로브 보 정
목적:측정에 사용될 프로브의 지름 및 각 프로브간의 상대 위치를 정확 시
산출하여 측정값 계산에 활용하기 위하여 프로브 교정을 실시하며 프로브
교정 오차는 측정값에 직접적인 영향을 미치므로 대단히 중요합니다.
3). 보 정 원리
보 정 원리:진원도가 양호한 기준 구를 프로빙하여 계산한 값과 기준 구 교
정값의차(프로브 지름)를 구하고 여러 개의 프로브로 기준 구를 프로빙하여
각 프로브간의 상대 위치를 구합니다.
4). 보 정 구 지름의 특징
실제 지름보다는 일반적으로 작게 계산되며 측정압이 높을수록 프로브 길이
가 길고 생크가 가늘수록 실제 지름과의 차가 심하게 나타납니다. 또한 프로
브 측정압 조정,측정실내의 심한 온도 변동 등 물리적인 변화가 발생한 경우
에는 반드시 보 정 볼 지름을 다시 구해야 합니다.
5. 삼차원 측정기의 정도
삼차원 측정기의 규격은 전세계마다 다르지만 현재는 규격통일의 기운이
고조되고 있으며 우리나라에서는 ISO 10360-3,4가 발표되었고 현재 용어,성
능,용법등에 있어서 계속 적으로 심의되고 있습니다.
1). 정도의 표시
정도의 표시방법을 ISO 10360-2에서는 길이 측정에 있어서 좌표 측정기의
지시 오차를 “E” 로 표시하고 다음과 같이 나타내고 있습니다.
E=A+L/K≤B 또는
E=A+L/K 또는
E=B
여기서
A : CMM제조업자에 의해서 제시되는 상수 um
K : CMM제조업자에 의해서 제시되는 무차 원 상수
L : 측정길이로 단위는 mm
B : CMM제조업자에 의해서 제시되는 E의 최대값 um
사용자에게 실제로 필요한 것은 공간의 측정정도 이고 이 측정방법 평가방
법은 KS B 5542에 교정되어 있습니다.
2). 환경 조건
환경 조건은 온도, 진동, 상대습도의 3가지가 있고 온도와 습도는 특히 조건
을 지정하지 않는 경우는 다음과 같이 추천합니다.
온도 : 주위온도 20±2°C
온도변화:1°C/h
온도분포:1°C/m
상대습도 : 50±10%
진동에 있어서 지반진동의 허용치는 3차원측정기 제작사가 다음과 같이 정
합니다.
진동수 10Hz 이하 : 최대 진폭 W(mm) 이하
진동수 10Hz 초과 50Hz 이하 : 최대 가속도 P(m/s²) 이하
6. 좌표계
좌표계는 서로 직교하는 세 축으로 구성이 되며 크게 기계 좌표계와 측정
좌표계로 나뉘웁니다.
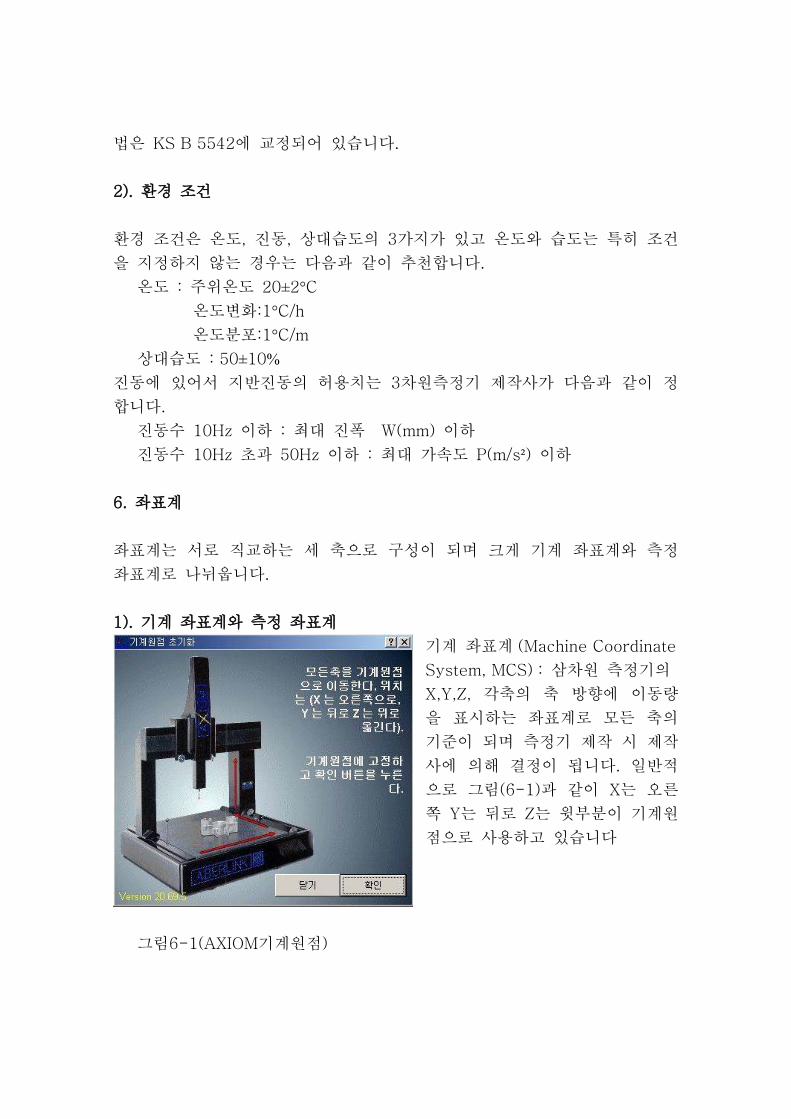
1). 기계 좌표계와 측정 좌표계
기계 좌표계 (Machine Coordinate
System, MCS) : 삼차원 측정기의
X,Y,Z, 각축의 축 방향에 이동량
을 표시하는 좌표계로 모든 축의
기준이 되며 측정기 제작 시 제작
사에 의해 결정이 됩니다. 일반적
으로 그림(6-1)과 같이 X는 오른
쪽 Y는 뒤로 Z는 윗부분이 기계원
점으로 사용하고 있습니다
그림6-1(AXIOM기계원점)
측정 좌표계 (Parts Coordinate System, PCS) : 측정자가 도면 등에서
주어진 좌표를 바탕으로 하여 작성하는 좌표계가 측정 좌표계입니다.
축 방향 및 부호(CMM 전면에서 볼 때)
좌 ↔ 우 방향을 X 축으로 표현함(우측 방향이 +).
전 ↔ 후 방향을 Y 축으로 표현함(뒤쪽 방향이 +).
상 ↔ 하 방향을 Z 축으로 표현함(위쪽 방향이 +).
작업 평면
XY 평면 : X 축과 Y 축이 이루는 평면(기준 축은 Z).
YZ 평면 : Y축과 Z축이 이루는 평면(기준 축은 X).
ZX 평면 : Z축과 X축이 이루는 평면(기준 축은 Y).
2). 평형 이론
2-1). 평형: 공작물에 작용하는 힘의 균형을 평형이라 하며 공작물은 평형
상태가 되었을 때 정지함을 말합니다.
2-2). 선 평형: 작용된 힘에 의해 선형 궤적을 따라 운동하는 선형 운동의
평형을 의미하며,작용한 힘과 크기가 같고 방향이 반대인 힘이 작용함으로써
선형 평형이 이루어집니다.
2-3). 회전 평형: 중심에서 편 위 되어 작용력이 가해질 경우 중심을 축으로
하는 회전 모멘트가 공작물이 회전 운동을 하게 되므로 크기가 같고 방향이
반대인 회전 모멘트를 통하여 회전 평형이 이루어집니다.
2-4). 평형 이론의 응용: 위치 결정 구와 고정력을 배치하여 힘의 평형을 얻
을 수 있습니다.
3). 위치 결정 개념
3-1).공간에서의 운동
공간에서 공작물의 운동은 선 운동과 회전 운동의 결합임.
3개의 축 선에 대한 평행 운동과 회전 운동을 가짐.
공간상의 운동을 정확하게 구속하는 것이 위치 결정의 목표임.
3-2). 3개의 위치 결정 구에 의한 선형, 회전 운동 구속

평면상에 3개의 위치 결정 구를 배치함.
1개의 선형 운동과 2개의 회전 운동을 구속함
3-3). 2개의 위치 결정 구에 의한 선형, 회전 운동 구속
구속된 평면과 수직인 평면에서 구속되지 않은 회전 운동 방향으로 2
개의 위치 결정 구를 배치함.
1개의 선형 운동과 1개의 회전운동을 구속함.
3-4). 1개의 위치 결정 구에 의한 선형 운동 구속
구속되지 않은 선형 운동 방향으로 1개의 위치 결정 구를 배치함.
1개의 선형운동이 구속됨으로써 공간상의 운동이 완전히 구속됨.
4)공간상에서 물체의 운동
Axy
Ayz
Azx
X Y
Z
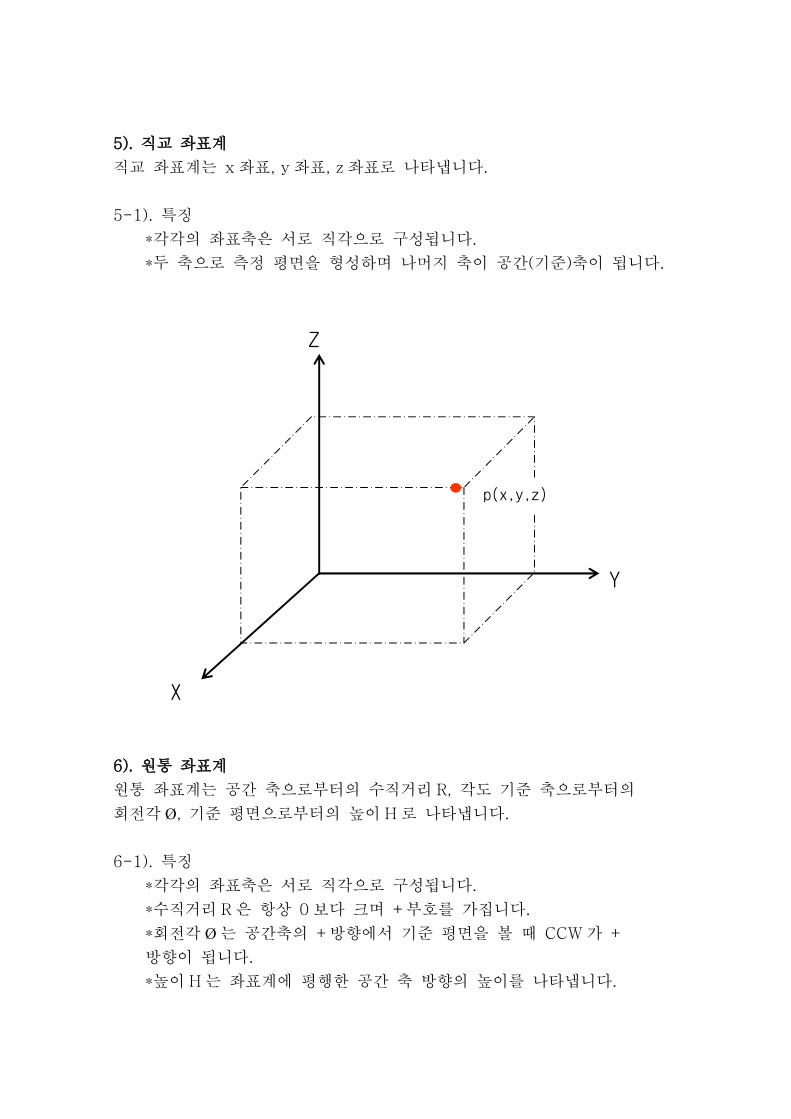
5). 직교 좌표계
직교 좌표계는 x 좌표, y 좌표, z 좌표로 나타냅니다.
5-1). 특징
*각각의 좌표축은 서로 직각으로 구성됩니다.
*두 축으로 측정 평면을 형성하며 나머지 축이 공간(기준)축이 됩니다.
6). 원통 좌표계
원통 좌표계는 공간 축으로부터의 수직거리 R, 각도 기준 축으로부터의
회전각 Ø, 기준 평면으로부터의 높이 H 로 나타냅니다.
6-1). 특징
*각각의 좌표축은 서로 직각으로 구성됩니다.
*수직거리 R 은 항상 0 보다 크며 +부호를 가집니다.
*회전각 Ø 는 공간축의 +방향에서 기준 평면을 볼 때 CCW 가 +
방향이 됩니다.
*높이 H 는 좌표계에 평행한 공간 축 방향의 높이를 나타냅니다.
Y
Z
X
p(x,y,z)
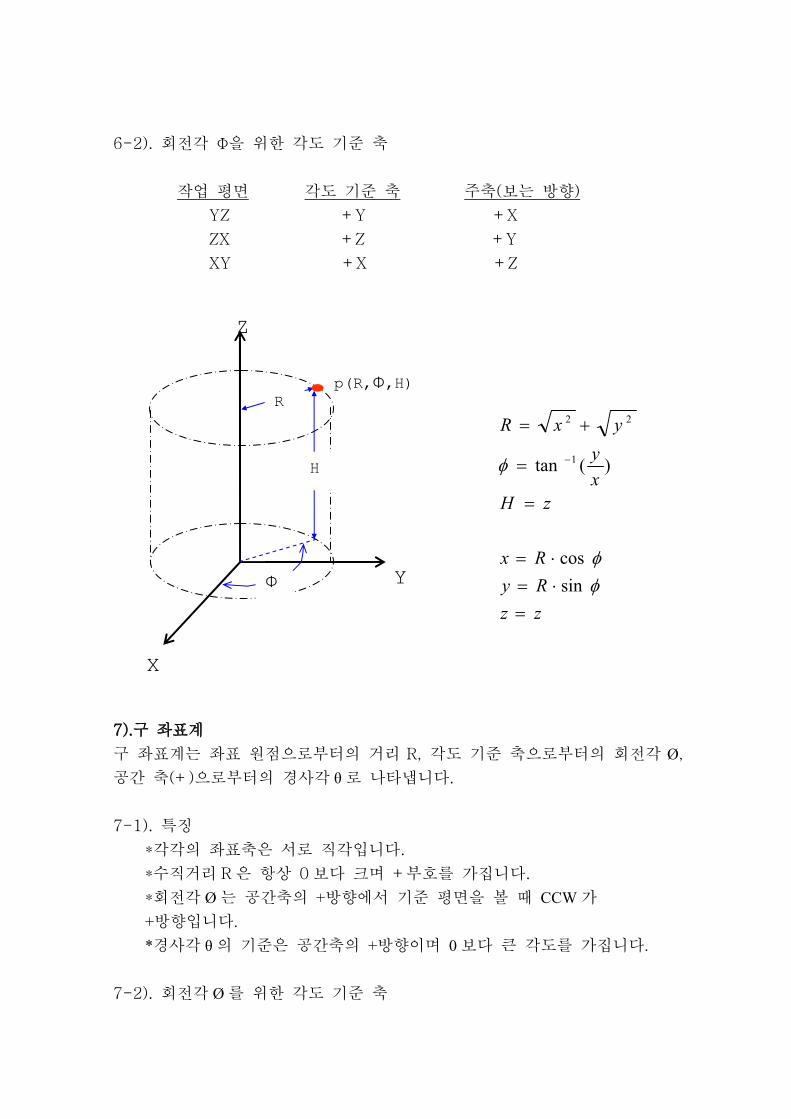
6-2). 회전각 Φ을 위한 각도 기준 축
작업 평면 각도 기준 축 주축(보는 방향)
YZ +Y +X
ZX +Z +Y
XY +X +Z
7).구 좌표계
구 좌표계는 좌표 원점으로부터의 거리 R, 각도 기준 축으로부터의 회전각 Ø,
공간 축(+)으로부터의 경사각 θ 로 나타냅니다.
7-1). 특징
*각각의 좌표축은 서로 직각입니다.
*수직거리 R 은 항상 0 보다 크며 +부호를 가집니다.
*회전각 Ø 는 공간축의 +방향에서 기준 평면을 볼 때 CCW 가
+방향입니다.
*경사각 θ 의 기준은 공간축의 +방향이며 0 보다 큰 각도를 가집니다.
7-2). 회전각 Ø 를 위한 각도 기준 축
Y
Z
X
p(R,Φ,H) R
H
Φ
zz
Ry
Rx
zH
x
y
yxR
=
⋅=
⋅=
=
=
+=
−
φ
φ
φ
sin
cos
)(tan 1
22

작업 평면 각도 기준 축 주축(보는 방향)
YZ +Y +X
ZX +Z +Y
XY +X +Z
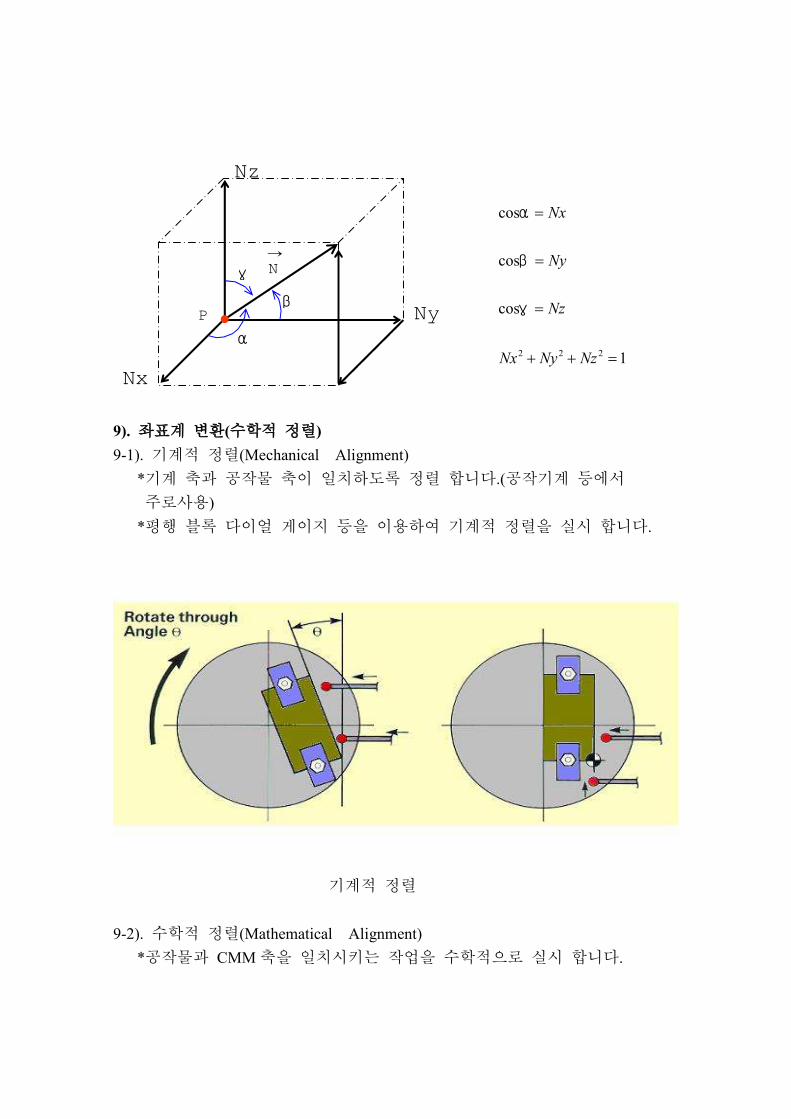
8). 방향 코사인
점 P 의 방향은 점에 수직한 벡터로 표현되며(단위 벡터) 단위 벡터는 직교
좌표계상의 Nx, Ny, Nz 성분으로 주어 집니다.
8-1). 특징
*방향 코사인은 단위 벡터와 해당 축 사이 각도의 코사인 값입니다.
*방향 코사인 제곱의 합은 항상 1 이 되어야 합니다.
Nx² + Ny² + Nz² = 1
COS α = Nx (i) α 는 단위 벡터와 X 축이 이루는 각도
COS β = Ny (j) β 는 단위 벡터와 Y 축이 이루는 각도
COS γ = Nz (k) γ 는 단위 벡터와 Z 축이 이루는 각도
Z
Y
X
p(R,θ,Φ)
Φ
θ
R
θ
φθ
φθ
φ
θ
cos
sinsin
cossin
)(tan
)(cos
1
1
222
⋅=
⋅⋅=
⋅⋅=
=
=
++=
−
−
Rz
Ry
Rx
x
y
R
z
zyxR
9). 좌표계 변환(수학적 정렬)
9-1). 기계적 정렬(Mechanical Alignment)
*기계 축과 공작물 축이 일치하도록 정렬 합니다.(공작기계 등에서
주로사용)
*평행 블록 다이얼 게이지 등을 이용하여 기계적 정렬을 실시 합니다.
기계적 정렬
9-2). 수학적 정렬(Mathematical Alignment)
*공작물과 CMM 축을 일치시키는 작업을 수학적으로 실시 합니다.
Nx
Ny
Nz
N →
α
β
γ
P
1
cos
cos
cos
222 =++
=
=
=
NzNyNx
Nz
Ny
Nx
γ
β
α
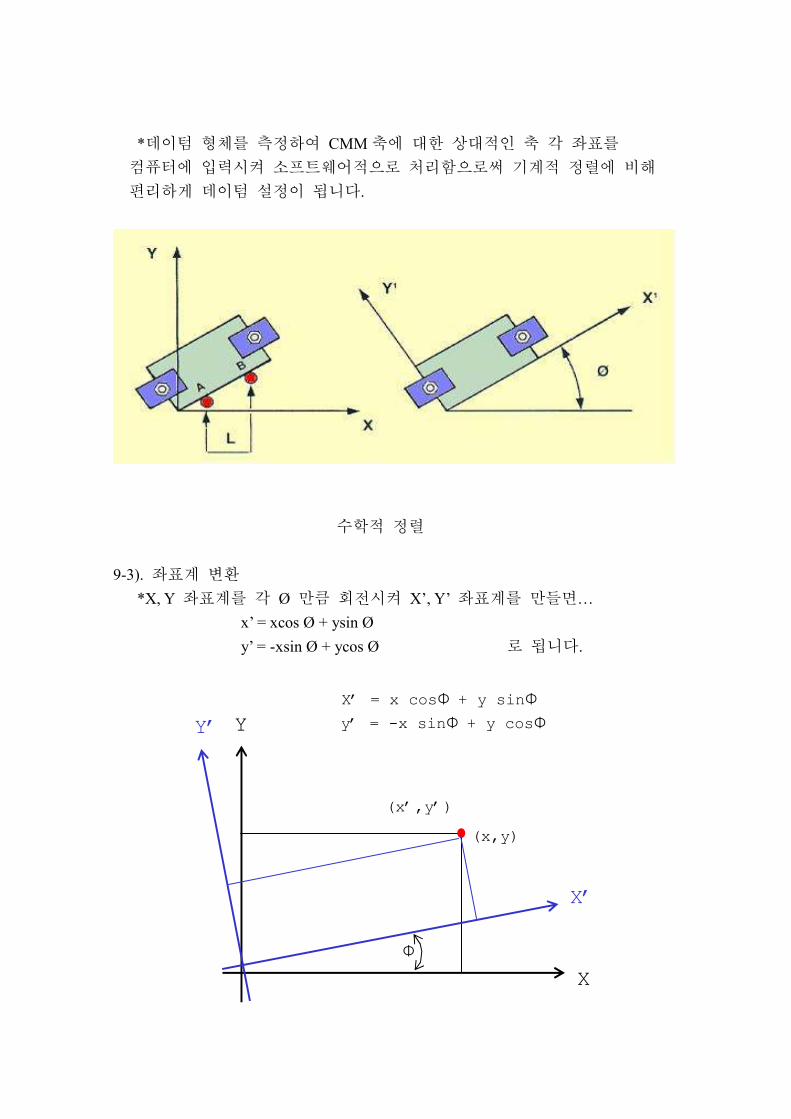
*데이텀 형체를 측정하여 CMM 축에 대한 상대적인 축 각 좌표를
컴퓨터에 입력시켜 소프트웨어적으로 처리함으로써 기계적 정렬에 비해
편리하게 데이텀 설정이 됩니다.
수학적 정렬
9-3). 좌표계 변환
*X, Y 좌표계를 각 Ø 만큼 회전시켜 X’, Y’ 좌표계를 만들면…
x’ = xcos Ø + ysin Ø
y’ = -xsin Ø + ycos Ø 로 됩니다.
Y
X
(x,y)
Y’
X’
(x’,y’)
Φ
X’ = x cosΦ + y sinΦ
y’ = -x sinΦ + y cosΦ
7. 기하학적 치수공차(Geometric Dimensioning and Tolerancing)
부품에 규제된 치수공차에 형상 및 위치공차를 부여하여 설계자의 의도를
명확하고 간략하게 전달하고 최종제품을 가장 경제적이고 효율적으로
생산할 수 있도록 하고 기능 및 결함부품 상호간에 호환성을 주고
검사방법을 용이하게 하는데 중점을 두고 설계,생산,검사상에 일관된 해석을
할 수 있도록 도면에 치수공차 및 형상과 위치공차를 적절히 규제 시키는
것이 주요 목적입니다.
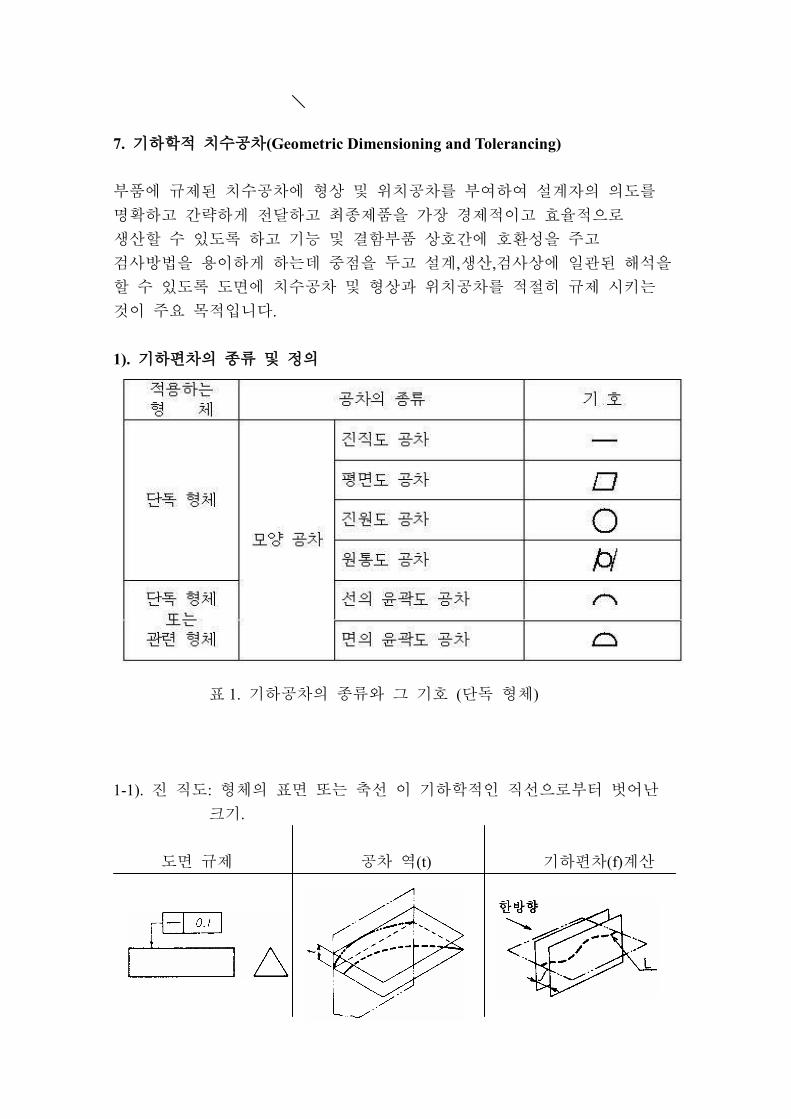
1). 기하편차의 종류 및 정의
표 1. 기하공차의 종류와 그 기호 (단독 형체)
1-1). 진 직도: 형체의 표면 또는 축선 이 기하학적인 직선으로부터 벗어난
크기.
도면 규제 공차 역(t) 기하편차(f)계산
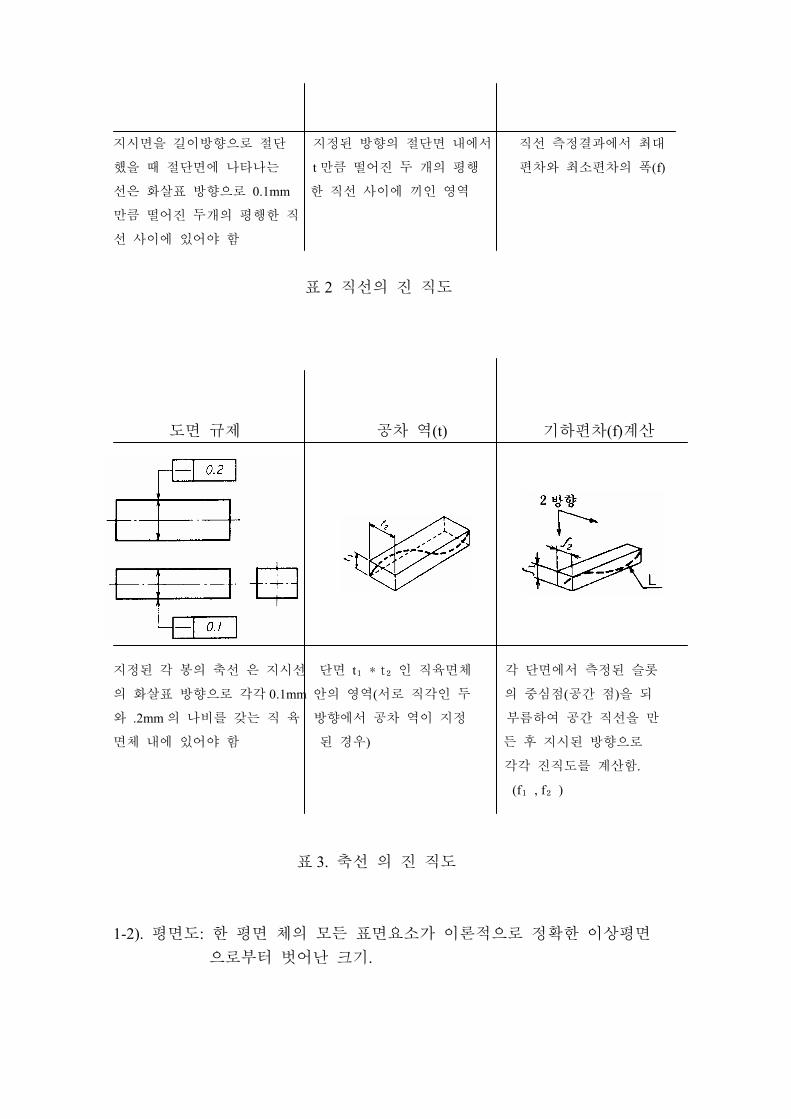
지시면을 길이방향으로 절단 지정된 방향의 절단면 내에서 직선 측정결과에서 최대
했을 때 절단면에 나타나는 t 만큼 떨어진 두 개의 평행 편차와 최소편차의 폭(f)
선은 화살표 방향으로 0.1mm 한 직선 사이에 끼인 영역
만큼 떨어진 두개의 평행한 직
선 사이에 있어야 함
표 2 직선의 진 직도
도면 규제 공차 역(t) 기하편차(f)계산
지정된 각 봉의 축선 은 지시선 단면 t₁* t₂인 직육면체 각 단면에서 측정된 슬롯
의 화살표 방향으로 각각 0.1mm 안의 영역(서로 직각인 두 의 중심점(공간 점)을 되
와 .2mm 의 나비를 갖는 직 육 방향에서 공차 역이 지정 부름하여 공간 직선을 만
면체 내에 있어야 함 된 경우) 든 후 지시된 방향으로
각각 진직도를 계산함.
(f₁, f₂)
표 3. 축선 의 진 직도
1-2). 평면도: 한 평면 체의 모든 표면요소가 이론적으로 정확한 이상평면
으로부터 벗어난 크기.

도면 규제 공차 역(t) 기하편차(f)계산
지정된 표면은 0.08mm 만큼 떨 t 만큼 떨어진 두 개의 평 평면 측정결과에서 최대편차
어진 두 개의 평행한 평면 사 행한 평면 사이의 영역. 와 최소편차의 폭(f).
이에 있어야 함.
표 4. 평면도 공차
1-3). 진원도: 둥근 봉 둥근 구멍 둥근 추 또는 구 등의 한 단면의
윤곽형상이 기하학적으로 똑바른 원으로부터 벗어난 크기.
도면 규제 공차 역(t) 기하편차(f)계산
지정된 원형 형체의 바깥둘레 t 만큼 떨어진 두 개의 원측정 결과에서 최대편차
는 동일 평면 위에서 0.03mm 동심원 사이의 영역. 와 최소편차의 폭(f)
만큼 떨어진 두 개의 동심원
사이에 있어야 함.
표 5 진원도 공차
1-4). 원통도: 원통 부분이 기하학 적인 원통면에서 벗어난 크기.
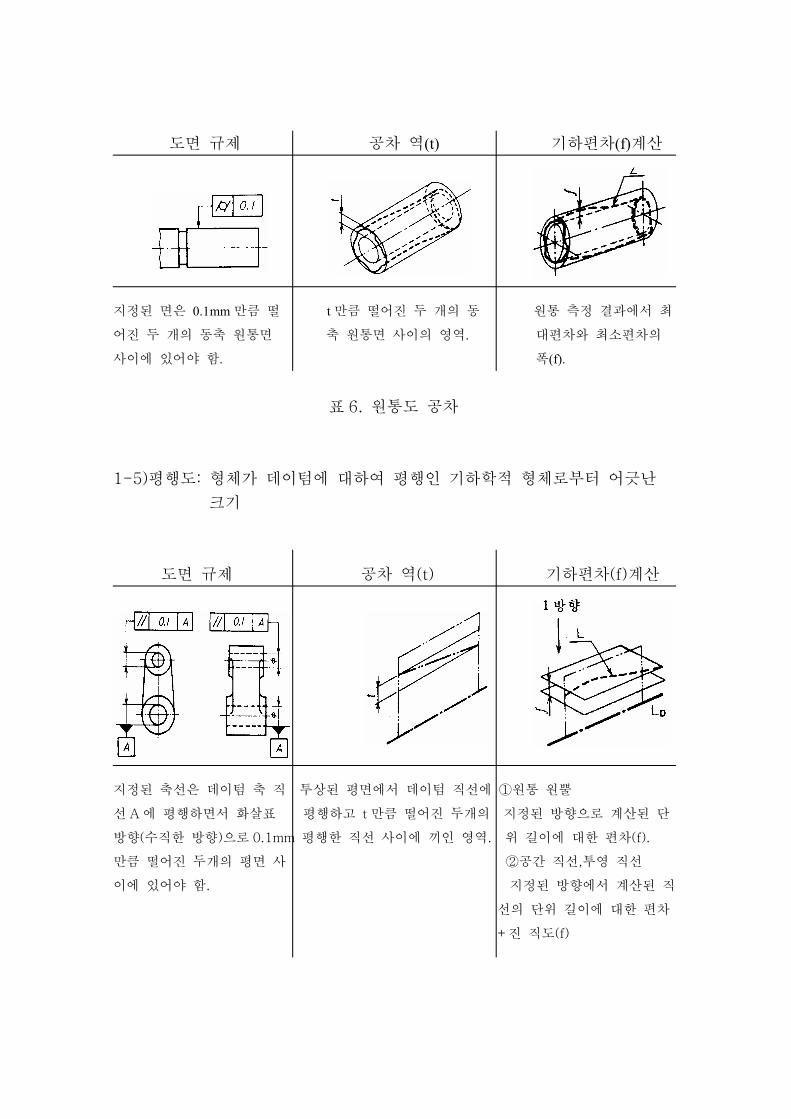
도면 규제 공차 역(t) 기하편차(f)계산
지정된 면은 0.1mm 만큼 떨 t 만큼 떨어진 두 개의 동 원통 측정 결과에서 최
어진 두 개의 동축 원통면 축 원통면 사이의 영역. 대편차와 최소편차의
사이에 있어야 함. 폭(f).
표 6. 원통도 공차
1-5)평행도: 형체가 데이텀에 대하여 평행인 기하학적 형체로부터 어긋난
크기
도면 규제 공차 역(t) 기하편차(f)계산
지정된 축선은 데이텀 축 직 투상된 평면에서 데이텀 직선에 ①원통 원뿔
선 A 에 평행하면서 화살표 평행하고 t 만큼 떨어진 두개의 지정된 방향으로 계산된 단
방향(수직한 방향)으로 0.1mm 평행한 직선 사이에 끼인 영역. 위 길이에 대한 편차(f).
만큼 떨어진 두개의 평면 사 ②공간 직선,투영 직선
이에 있어야 함. 지정된 방향에서 계산된 직
선의 단위 길이에 대한 편차
+진 직도(f)
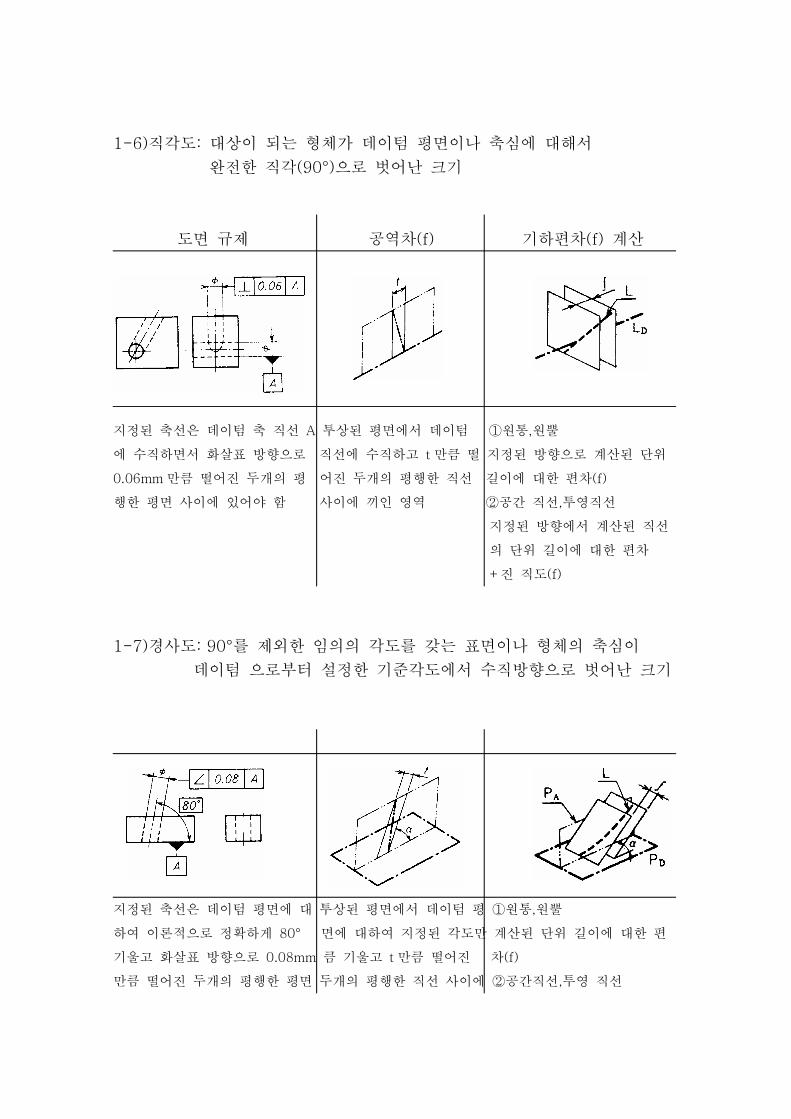
1-6)직각도: 대상이 되는 형체가 데이텀 평면이나 축심에 대해서
완전한 직각(90°)으로 벗어난 크기
도면 규제 공역차(f) 기하편차(f) 계산
지정된 축선은 데이텀 축 직선 A 투상된 평면에서 데이텀 ①원통,원뿔
에 수직하면서 화살표 방향으로 직선에 수직하고 t 만큼 떨 지정된 방향으로 계산된 단위
0.06mm 만큼 떨어진 두개의 평 어진 두개의 평행한 직선 길이에 대한 편차(f)
행한 평면 사이에 있어야 함 사이에 끼인 영역 ②공간 직선,투영직선
지정된 방향에서 계산된 직선
의 단위 길이에 대한 편차
+진 직도(f)
1-7)경사도: 90°를 제외한 임의의 각도를 갖는 표면이나 형체의 축심이
데이텀 으로부터 설정한 기준각도에서 수직방향으로 벗어난 크기
지정된 축선은 데이텀 평면에 대 투상된 평면에서 데이텀 평 ①원통,원뿔
하여 이론적으로 정확하게 80° 면에 대하여 지정된 각도만 계산된 단위 길이에 대한 편
기울고 화살표 방향으로 0.08mm 큼 기울고 t 만큼 떨어진 차(f)
만큼 떨어진 두개의 평행한 평면 두개의 평행한 직선 사이에 ②공간직선,투영 직선
사이에 있어야 함. 끼인 영역 지정된 방향에서 계산된 직선
의 단위 길이에 대한 편차
+ 진 직도(f)
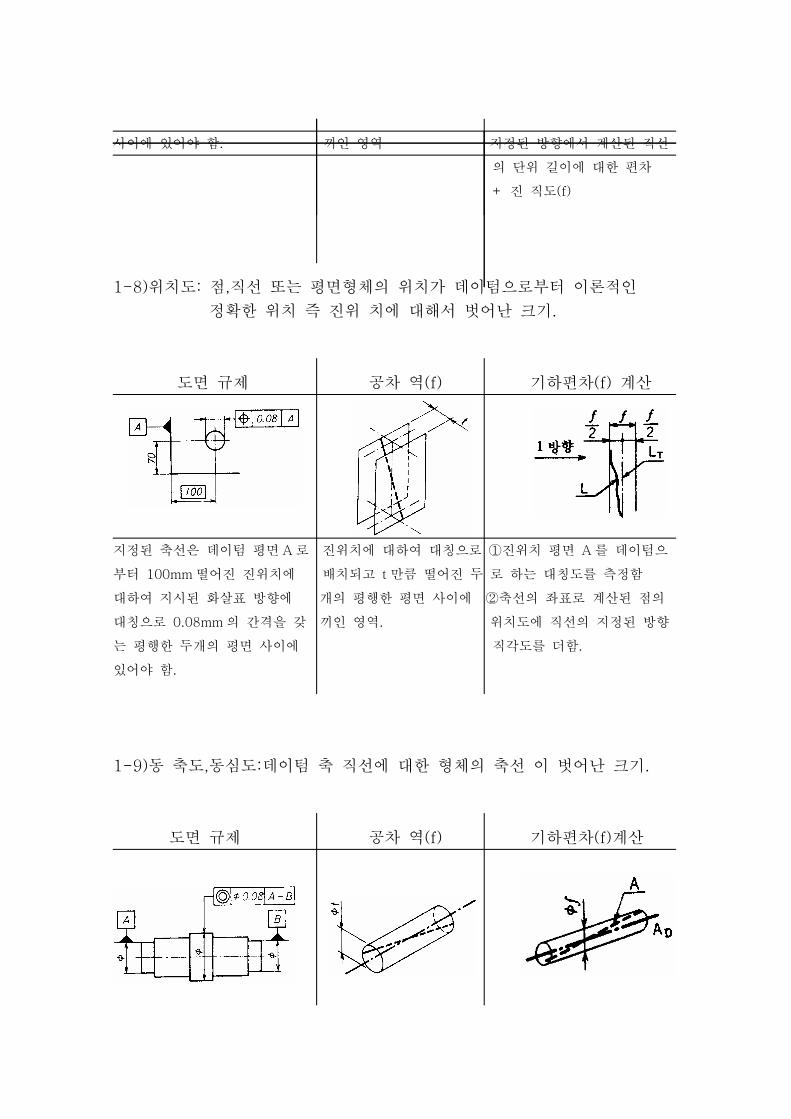
1-8)위치도: 점,직선 또는 평면형체의 위치가 데이텀으로부터 이론적인
정확한 위치 즉 진위 치에 대해서 벗어난 크기.
도면 규제 공차 역(f) 기하편차(f) 계산
지정된 축선은 데이텀 평면 A 로 진위치에 대하여 대칭으로 ①진위치 평면 A 를 데이텀으
부터 100mm 떨어진 진위치에 배치되고 t 만큼 떨어진 두 로 하는 대칭도를 측정함
대하여 지시된 화살표 방향에 개의 평행한 평면 사이에 ②축선의 좌표로 계산된 점의
대칭으로 0.08mm 의 간격을 갖 끼인 영역. 위치도에 직선의 지정된 방향
는 평행한 두개의 평면 사이에 직각도를 더함.
있어야 함.
1-9)동 축도,동심도:데이텀 축 직선에 대한 형체의 축선 이 벗어난 크기.
도면 규제 공차 역(f) 기하편차(f)계산
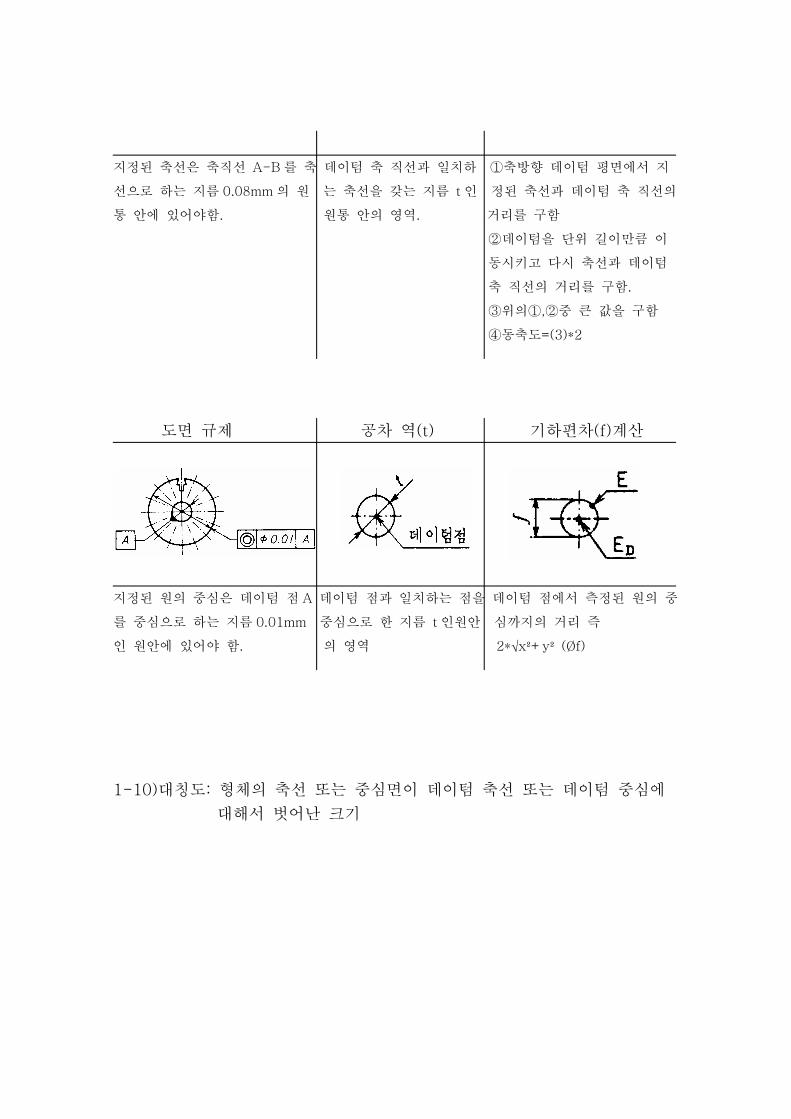
지정된 축선은 축직선 A-B 를 축 데이텀 축 직선과 일치하 ①축방향 데이텀 평면에서 지
선으로 하는 지름 0.08mm 의 원 는 축선을 갖는 지름 t 인 정된 축선과 데이텀 축 직선의
통 안에 있어야함. 원통 안의 영역. 거리를 구함
②데이텀을 단위 길이만큼 이
동시키고 다시 축선과 데이텀
축 직선의 거리를 구함.
③위의①,②중 큰 값을 구함
④동축도=(3)*2
도면 규제 공차 역(t) 기하편차(f)계산
지정된 원의 중심은 데이텀 점 A 데이텀 점과 일치하는 점을 데이텀 점에서 측정된 원의 중
를 중심으로 하는 지름 0.01mm 중심으로 한 지름 t 인원안 심까지의 거리 즉
인 원안에 있어야 함. 의 영역 2*√x²+y² (Øf)
1-10)대칭도: 형체의 축선 또는 중심면이 데이텀 축선 또는 데이텀 중심에
대해서 벗어난 크기

도면 규제 공차 역(f) 기하편차(f) 계산
지정된 중심면은 데이텀 데이텀 중심 평면에 대칭으로 ①데이텀면의 중심 평면을 구함
중심 평면 A 에 대칭으로 배치되고 서로 t 만큼 떨어진 ②규제형체면의 중심 평면을 구함
0.08mm 의 간격을 평행한두 개의 평행한 평면 사이에 ③대칭도(f)=편차*2
두개의 평면 사이에 있어 끼인 영역.
야함.