Embed Size (px)
Citation preview

© 2012 Maplesoft, a division of Waterloo Maple Inc.
Paul Goossens, VP of Application EngineeringDr. Orang Vahid, Senior Modeling Engineer
High-Fidelity Physical Modeling for Aerospace Mechatronics Applications

© 2012 Maplesoft, a division of Waterloo Maple Inc.
• Introduction
• Case Studies:
• Quadrotor – Quanser
• Planetary Rover – University of Waterloo and Canadian Space Agency
• Challenges in Model-based design and development
• Maplesoft Engineering Solutions
Agenda
© 2012 Maplesoft, a division of Waterloo Maple Inc.
Physical Model-based Development
“Virtual” Prototyping through Model-based Design and Development plays an increasingly key role in system design, commissioning and testing.
•Increasing adoption of MBD and simulation
• Reduce prototyping cycles and costs
• Increase end-user functionality, quality, safety and reliability
• Deterministic, repeatable testing platform
Connection to real components with virtual subsystems through Hardware-in-the-Loop (HIL) Testing is critical to this strategy
• Validation of subcomponents and/or controllers before integrating into the vehicle reduces errors and costs
• Validation of model against the real thing improves the whole process, dramatically reducing development cycles and time-to-market in the future
Greater demand for greater model fidelity…
© 2012 Maplesoft, a division of Waterloo Maple Inc.
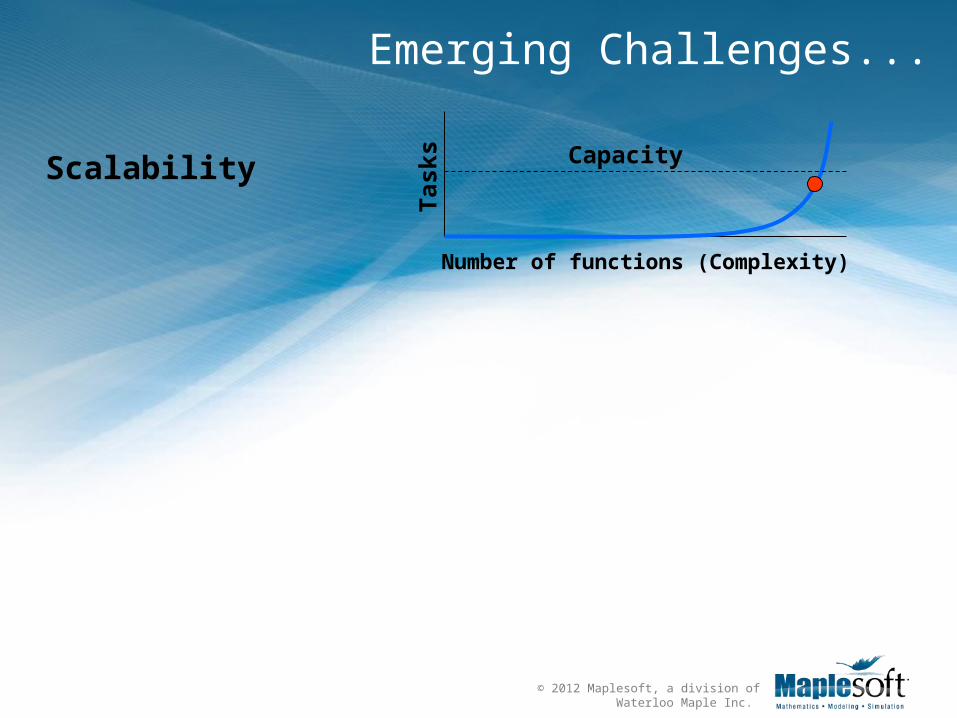
Scalability
Task
s Capacity
Number of functions (Complexity)
Emerging Challenges...
© 2012 Maplesoft, a division of Waterloo Maple Inc.
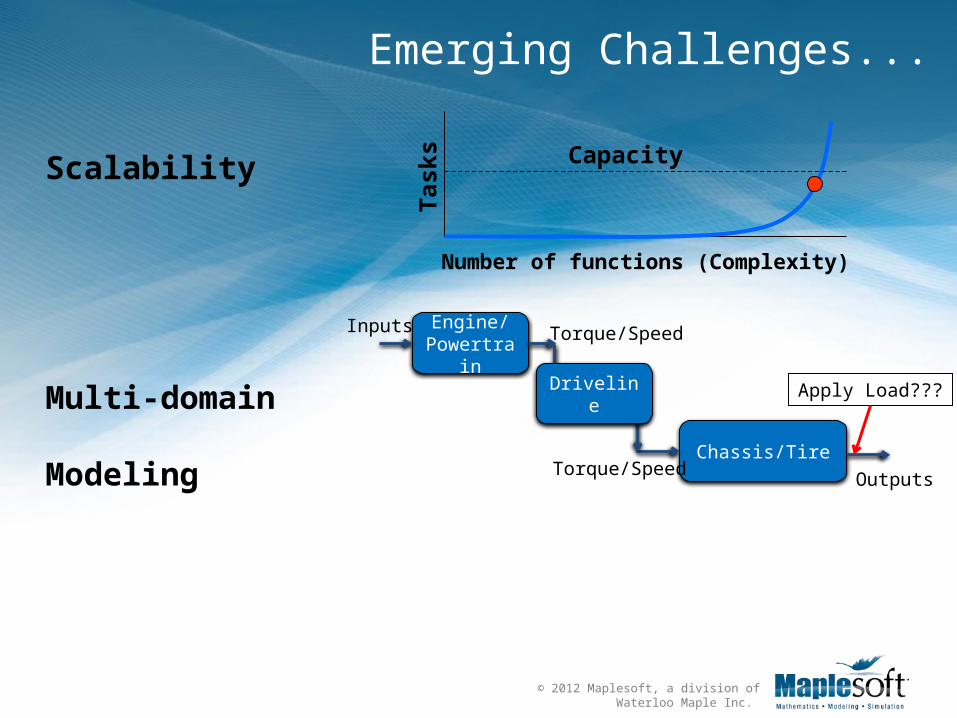
Scalability
Multi-domain Modeling
Engine/Powertrain
Torque/SpeedInputs
Chassis/TireTorque/Speed Outputs
Apply Load???Driveline
Task
s Capacity
Number of functions (Complexity)
Emerging Challenges...
© 2012 Maplesoft, a division of Waterloo Maple Inc.
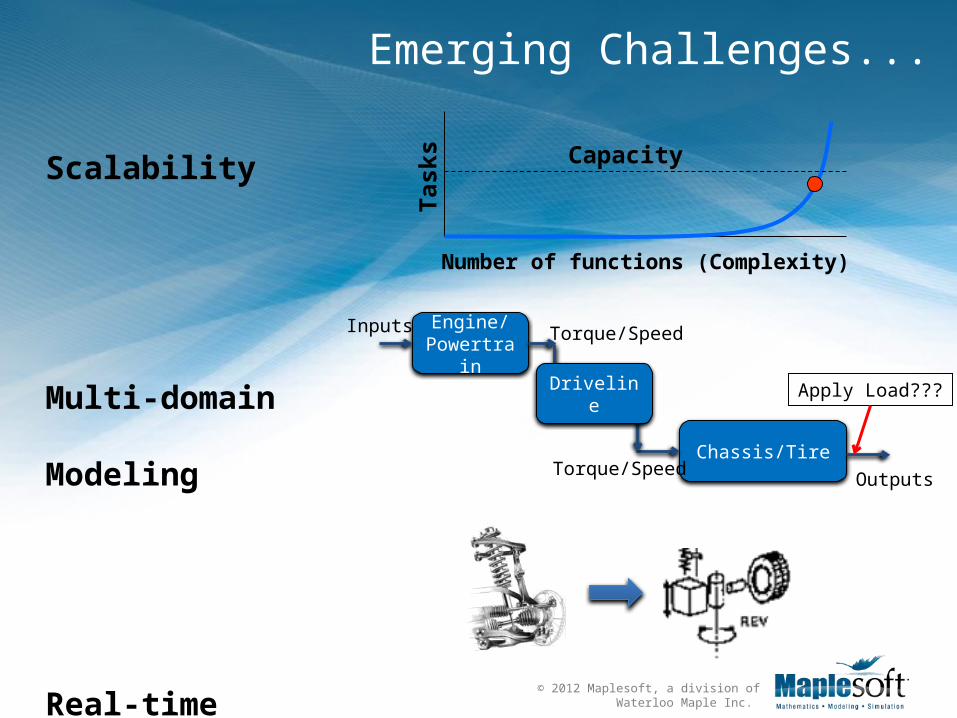
Scalability
Multi-domain Modeling
Real-time Performance
Engine/Powertrain
Torque/SpeedInputs
Chassis/TireTorque/Speed Outputs
Apply Load???Driveline
Task
s Capacity
Number of functions (Complexity)
Emerging Challenges...
© 2012 Maplesoft, a division of Waterloo Maple Inc.
Qball-X4 Development
© 2012 Maplesoft, a division of Waterloo Maple Inc.
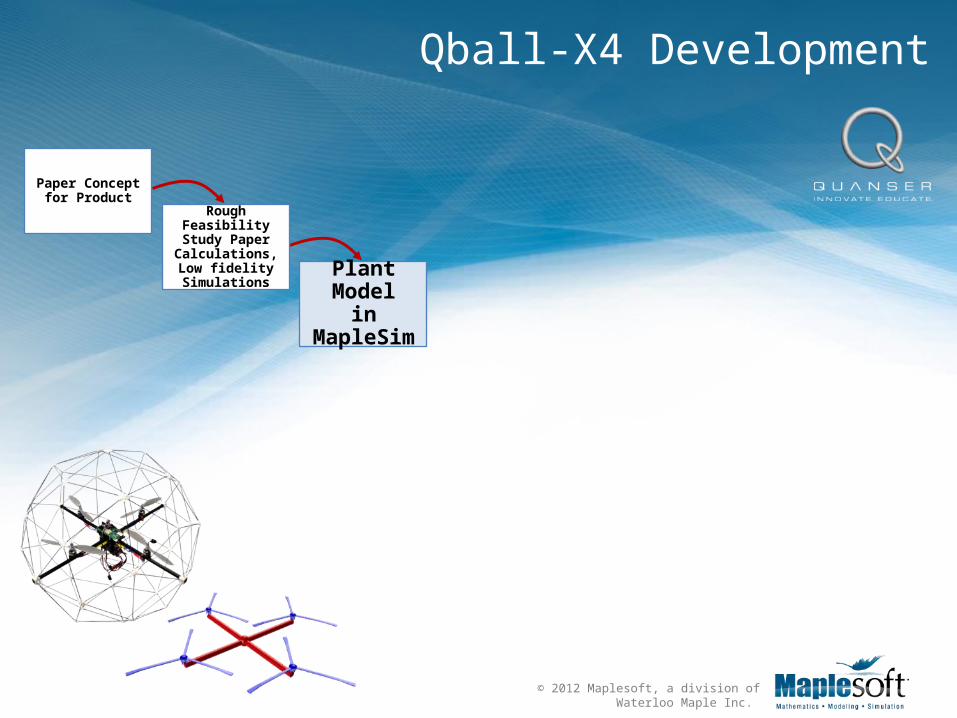
Paper Concept for Product
Rough Feasibility Study Paper
Calculations, Low fidelity Simulations
Plant Modelin MapleSim
Qball-X4 Development
© 2012 Maplesoft, a division of Waterloo Maple Inc.
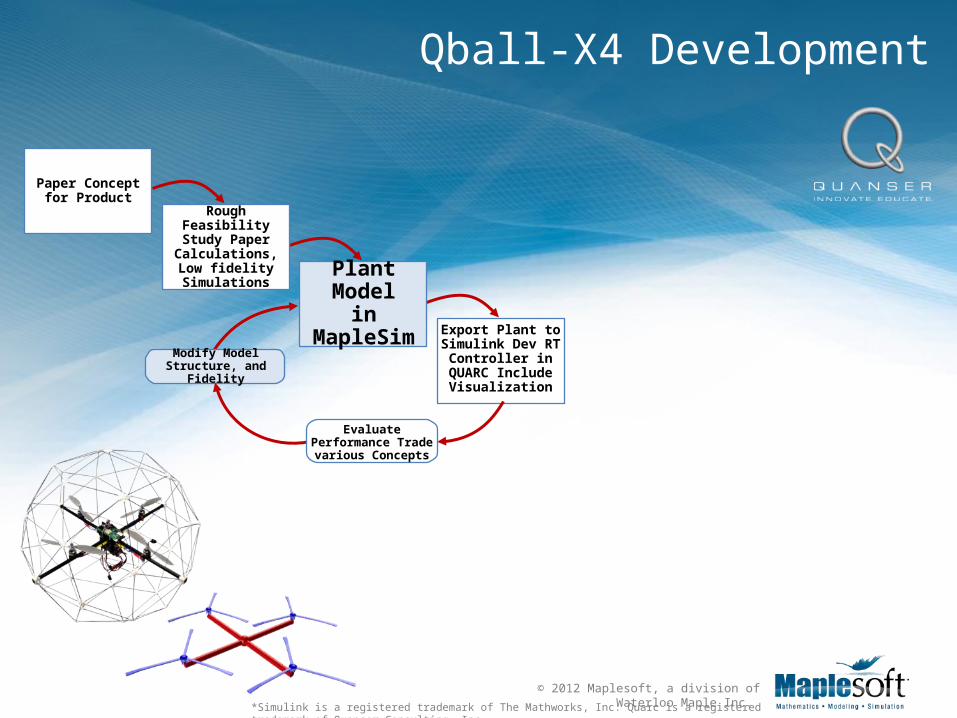
Paper Concept for Product
Rough Feasibility Study Paper
Calculations, Low fidelity Simulations
Plant Modelin MapleSim
Export Plant to Simulink Dev RT
Controller in QUARC Include Visualization
Modify Model Structure, and Fidelity
Evaluate Performance Trade various Concepts
Qball-X4 Development
*Simulink is a registered trademark of The Mathworks, Inc. Quarc is a registered trademark of Quanser Consulting, Inc.
© 2012 Maplesoft, a division of Waterloo Maple Inc.
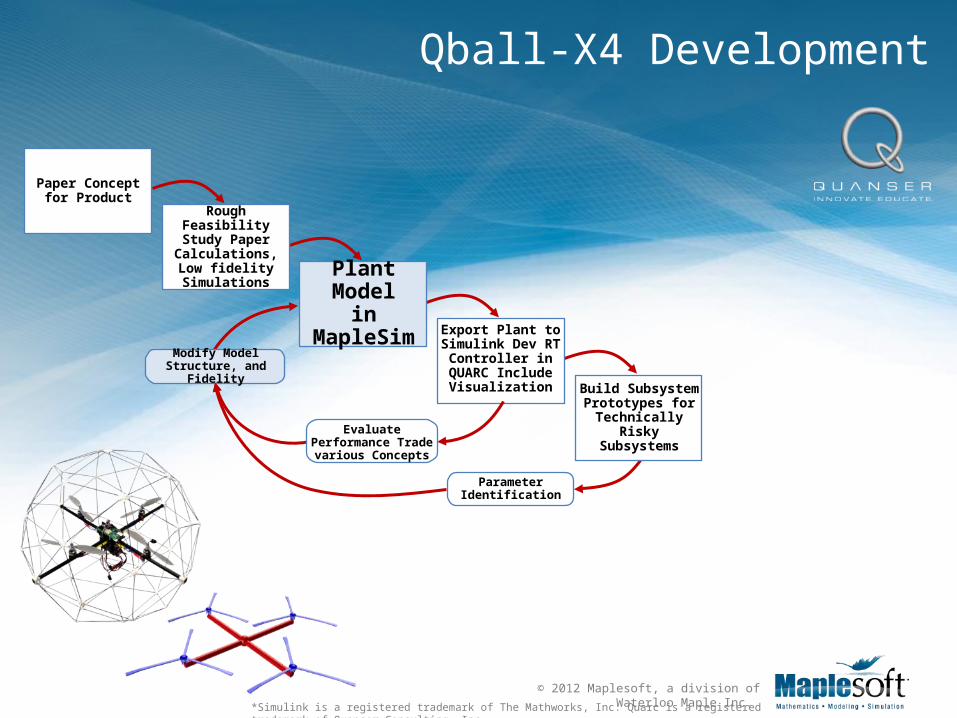
Paper Concept for Product
Rough Feasibility Study Paper
Calculations, Low fidelity Simulations
Plant Modelin MapleSim
Export Plant to Simulink Dev RT
Controller in QUARC Include Visualization
Modify Model Structure, and Fidelity
Parameter Identification
Build Subsystem Prototypes for
Technically Risky SubsystemsEvaluate Performance
Trade various Concepts
Qball-X4 Development
*Simulink is a registered trademark of The Mathworks, Inc. Quarc is a registered trademark of Quanser Consulting, Inc.
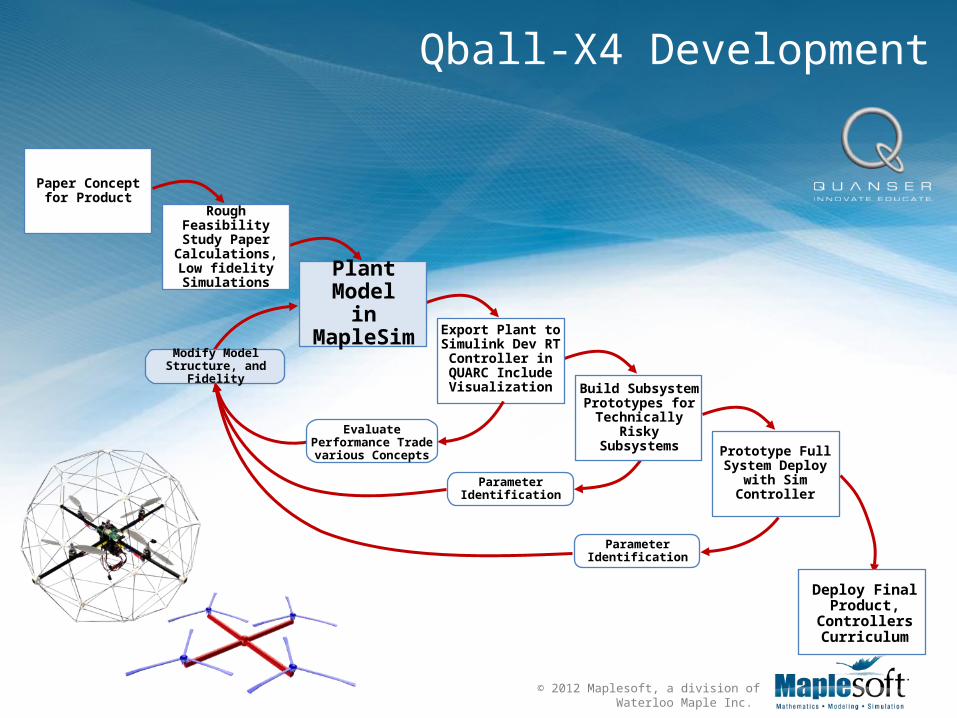
© 2012 Maplesoft, a division of Waterloo Maple Inc.
Paper Concept for Product
Rough Feasibility Study Paper
Calculations, Low fidelity Simulations
Plant Modelin MapleSim
Export Plant to Simulink Dev RT
Controller in QUARC Include Visualization
Modify Model Structure, and Fidelity
Parameter Identification
Build Subsystem Prototypes for
Technically Risky Subsystems
Parameter Identification
Prototype Full System Deploy
with Sim Controller
Deploy Final Product, Controllers
Curriculum
Evaluate Performance Trade various Concepts
Qball-X4 Development
© 2012 Maplesoft, a division of Waterloo Maple Inc.
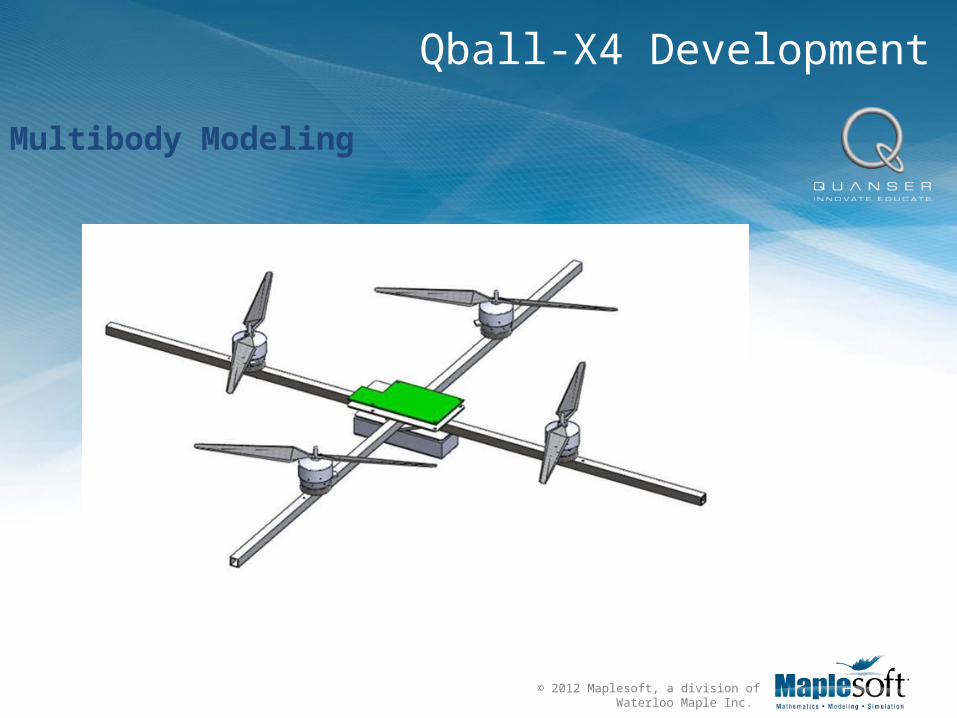
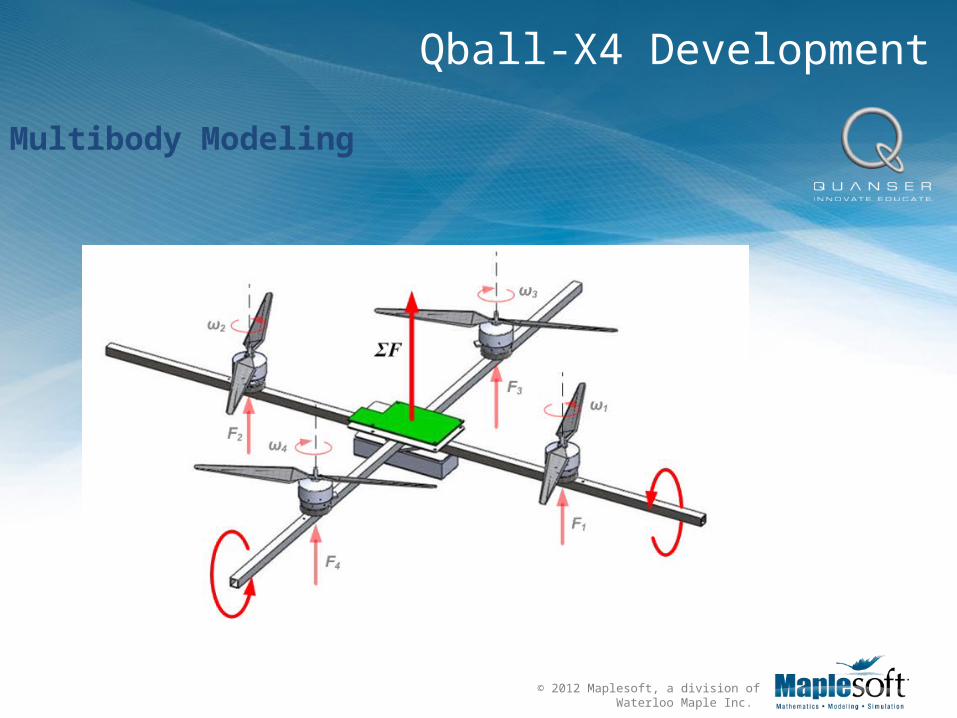
Qball-X4 Development
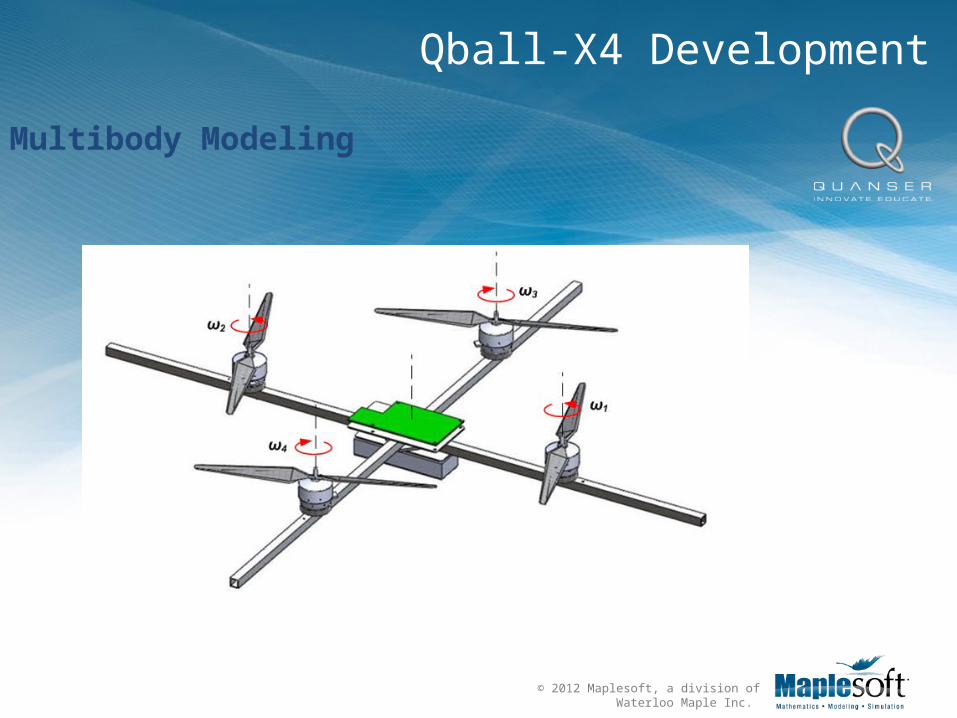
Multibody Modeling
© 2012 Maplesoft, a division of Waterloo Maple Inc.
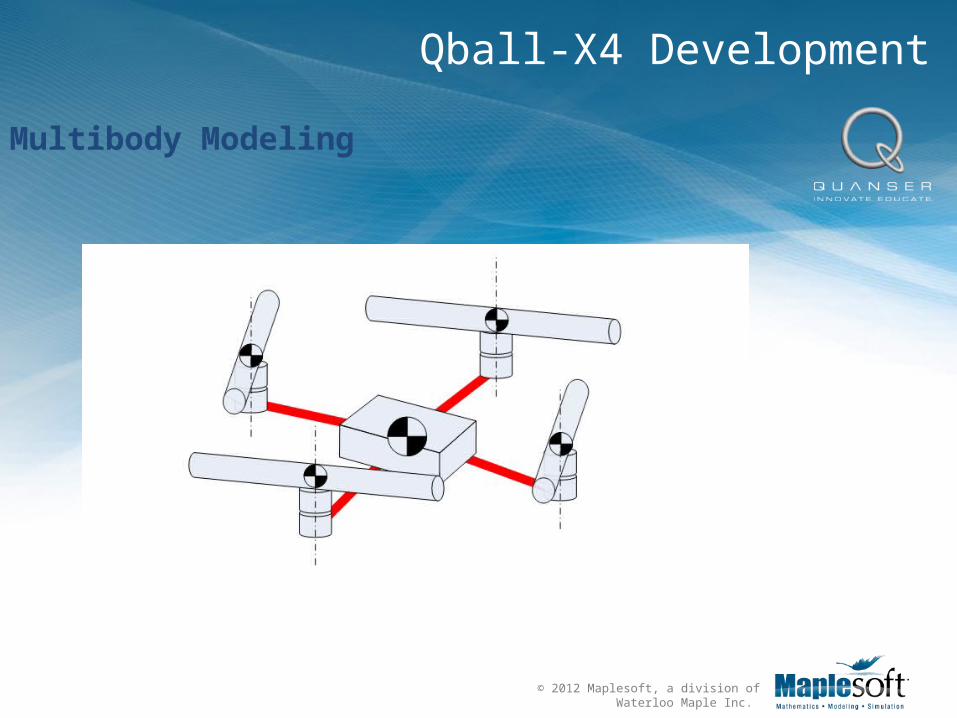
Qball-X4 Development
Multibody Modeling
© 2012 Maplesoft, a division of Waterloo Maple Inc.
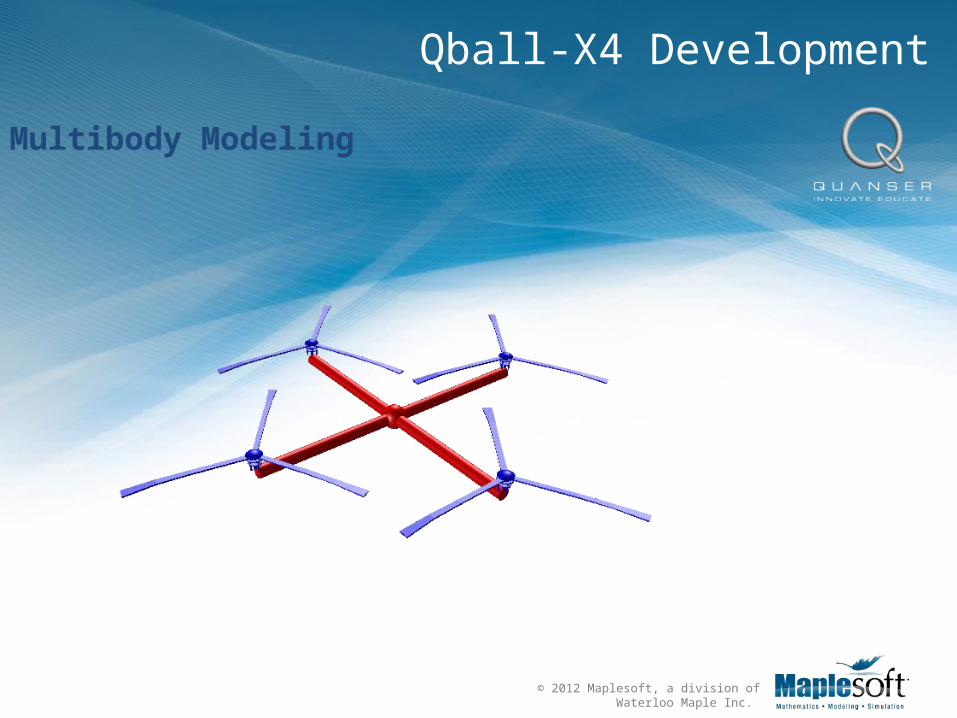
Multibody Modeling
Qball-X4 Development
© 2012 Maplesoft, a division of Waterloo Maple Inc.
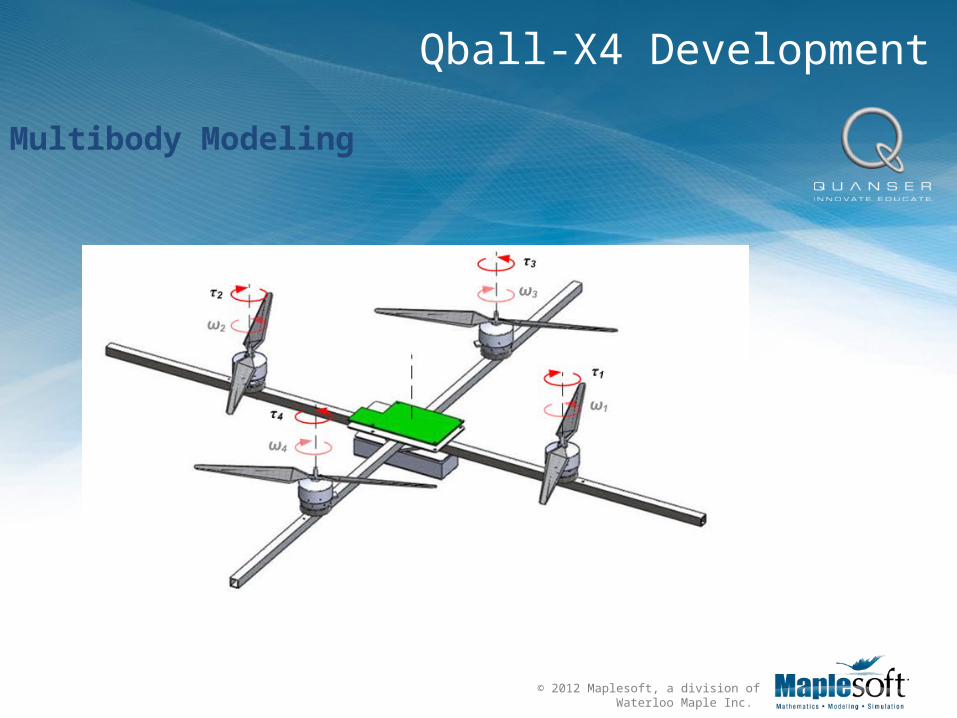
Multibody Modeling
Qball-X4 Development
© 2012 Maplesoft, a division of Waterloo Maple Inc.
Multibody Modeling
Qball-X4 Development
© 2012 Maplesoft, a division of Waterloo Maple Inc.
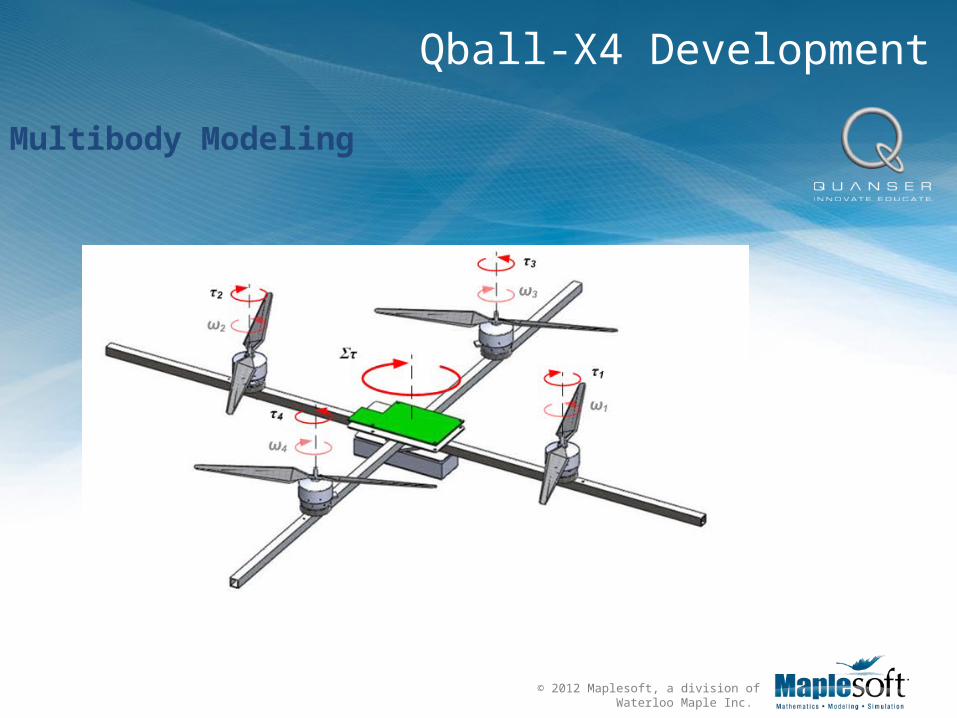
Multibody Modeling
Qball-X4 Development
© 2012 Maplesoft, a division of Waterloo Maple Inc.
Multibody Modeling
Qball-X4 Development
© 2012 Maplesoft, a division of Waterloo Maple Inc.
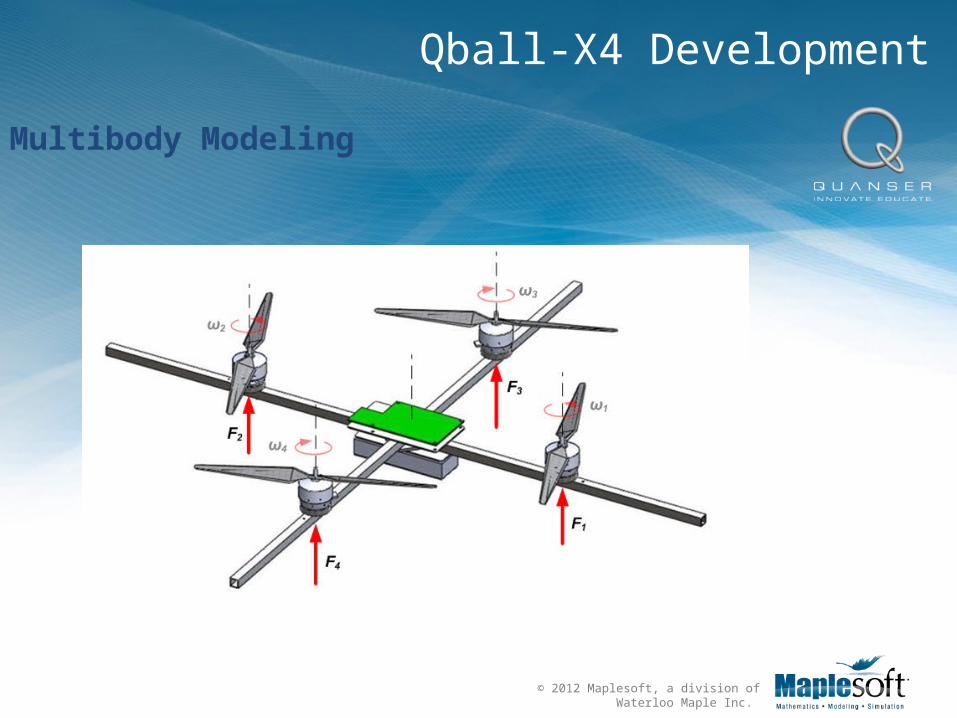
Multibody Modeling
Qball-X4 Development
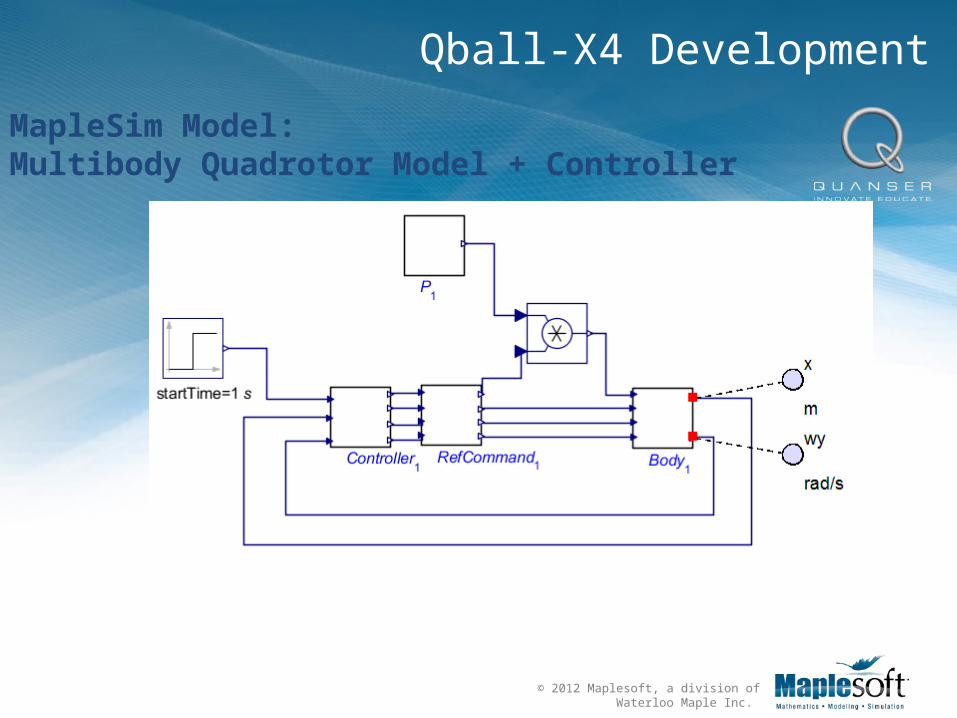
© 2012 Maplesoft, a division of Waterloo Maple Inc.
MapleSim Model: Multibody Quadrotor Model + Controller
Qball-X4 Development
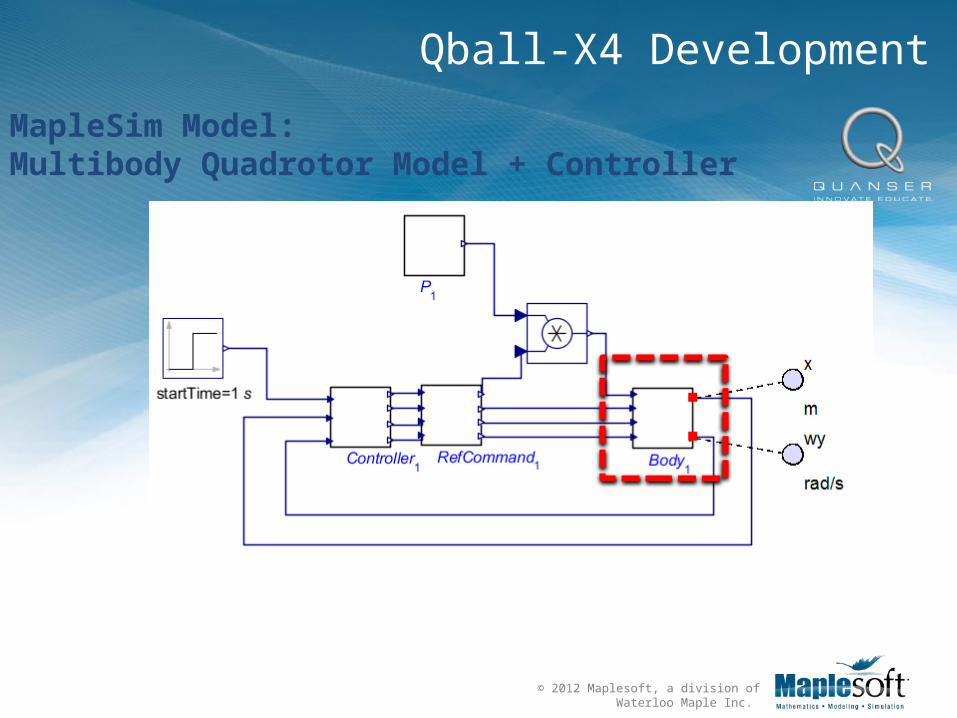
© 2012 Maplesoft, a division of Waterloo Maple Inc.
MapleSim Model: Multibody Quadrotor Model + Controller
Qball-X4 Development
© 2012 Maplesoft, a division of Waterloo Maple Inc.
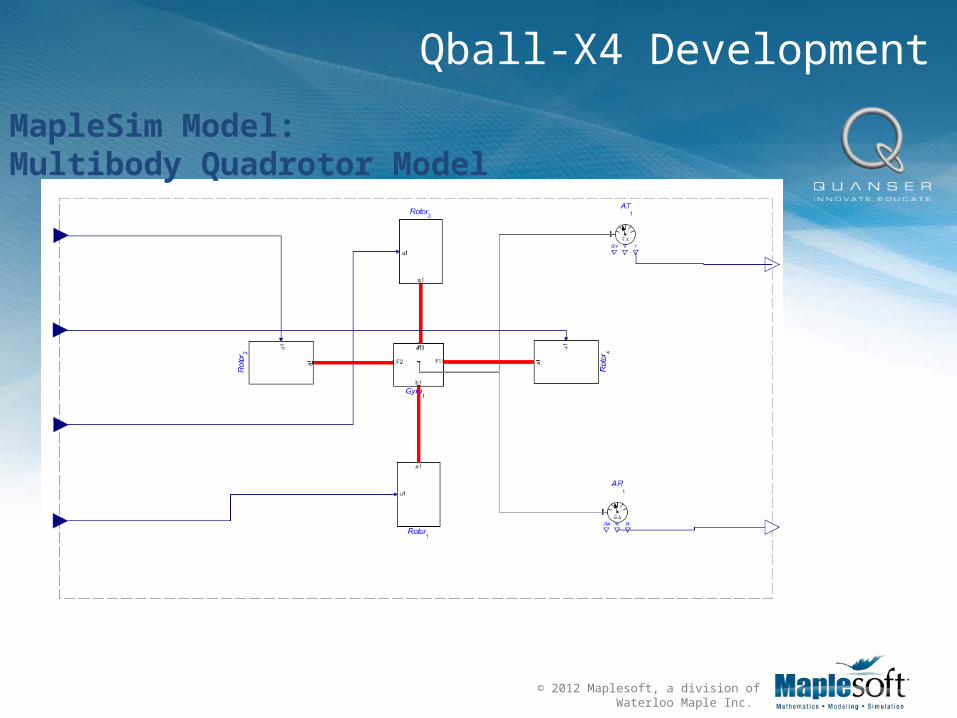
MapleSim Model: Multibody Quadrotor Model
Qball-X4 Development
© 2012 Maplesoft, a division of Waterloo Maple Inc.
MOVIE #1
Qball-X4 Development
© 2012 Maplesoft, a division of Waterloo Maple Inc.
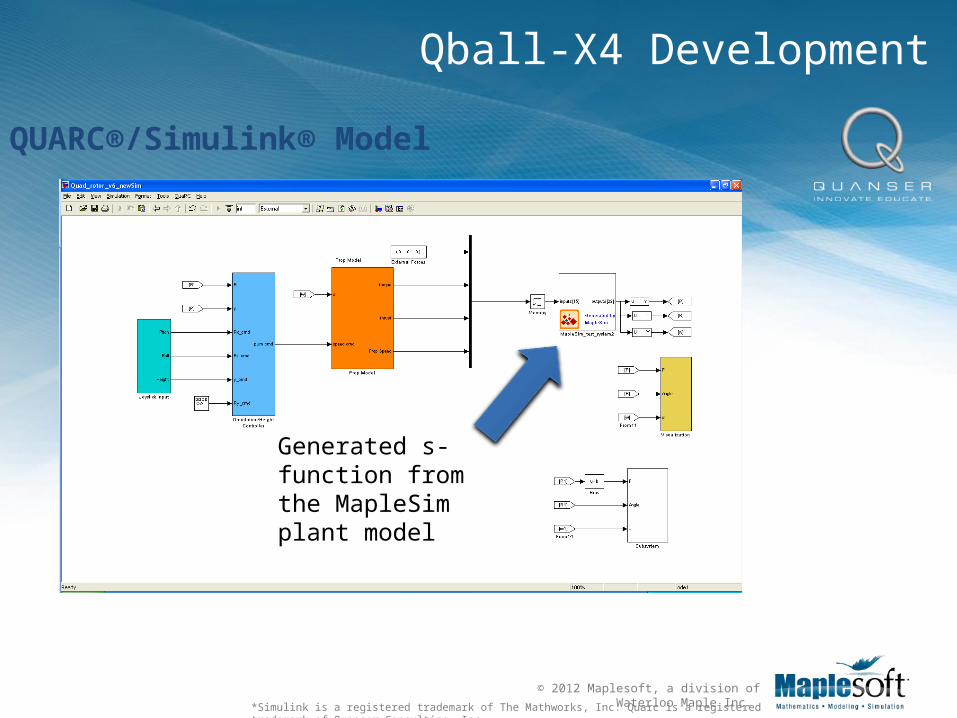
Generated s-function from the MapleSim plant model
QUARC®/Simulink® Model
Qball-X4 Development
*Simulink is a registered trademark of The Mathworks, Inc. Quarc is a registered trademark of Quanser Consulting, Inc.
© 2012 Maplesoft, a division of Waterloo Maple Inc.
MOVIE #2
Flight Test
Qball-X4 Development
© 2012 Maplesoft, a division of Waterloo Maple Inc.
Planetary Rovers
© 2012 Maplesoft, a division of Waterloo Maple Inc.
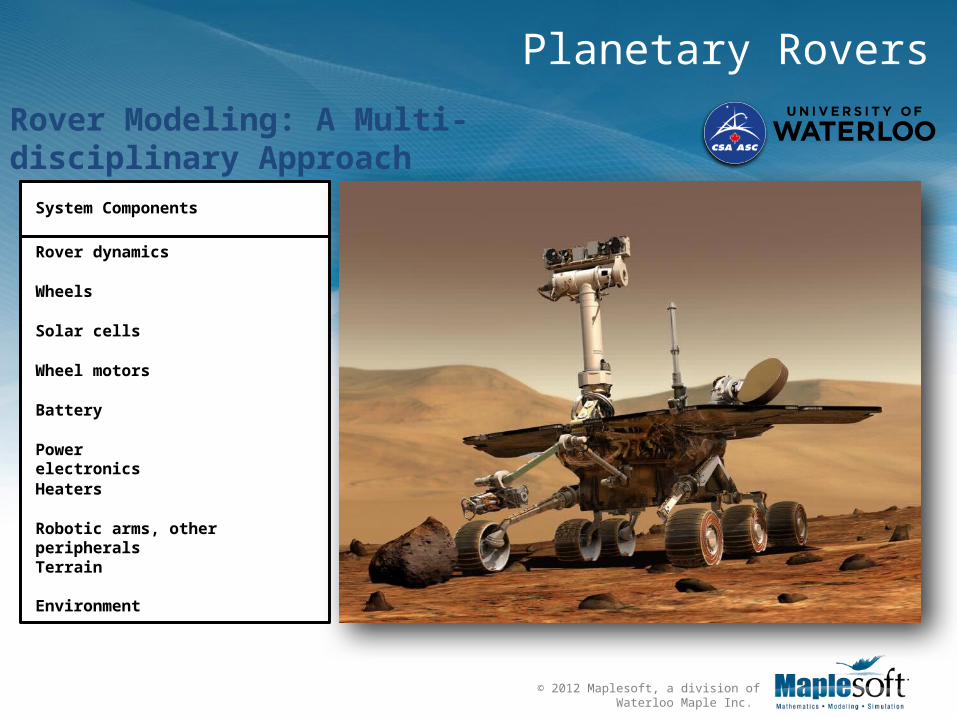
System Components
Rover dynamics
Wheels
Solar cells
Wheel motors
Battery
Power electronics
Heaters
Robotic arms, other peripherals
Terrain
Environment
Planetary Rovers
Rover Modeling: A Multi-disciplinary Approach
© 2012 Maplesoft, a division of Waterloo Maple Inc.
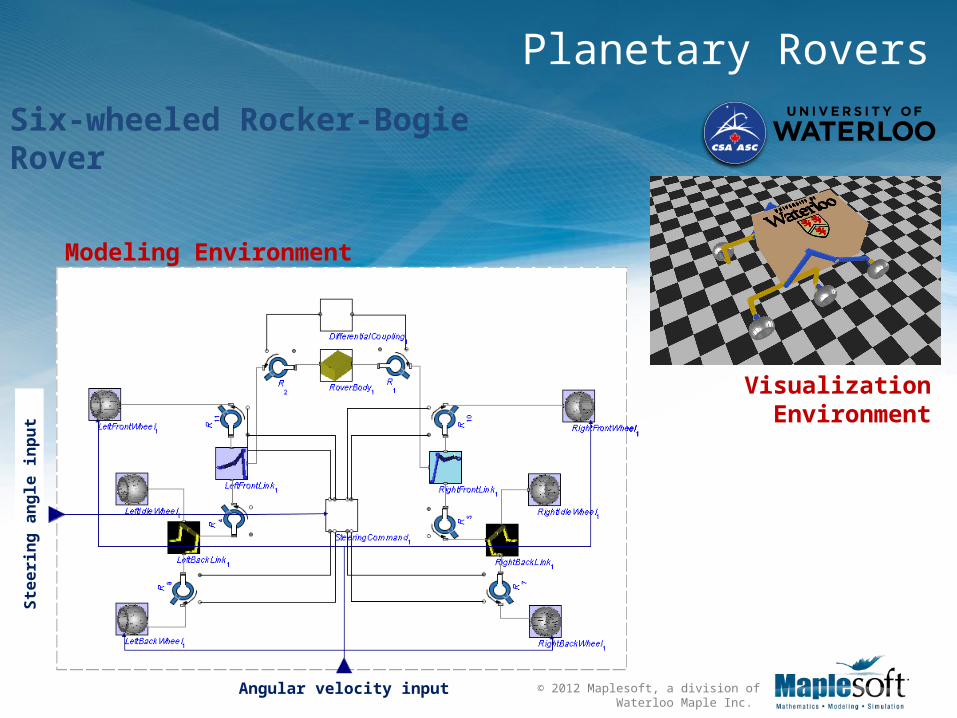
Visualization Environment
Modeling Environment
Angular velocity input
Stee
ring
angl
e in
put
Planetary Rovers
Six-wheeled Rocker-Bogie Rover
© 2012 Maplesoft, a division of Waterloo Maple Inc.
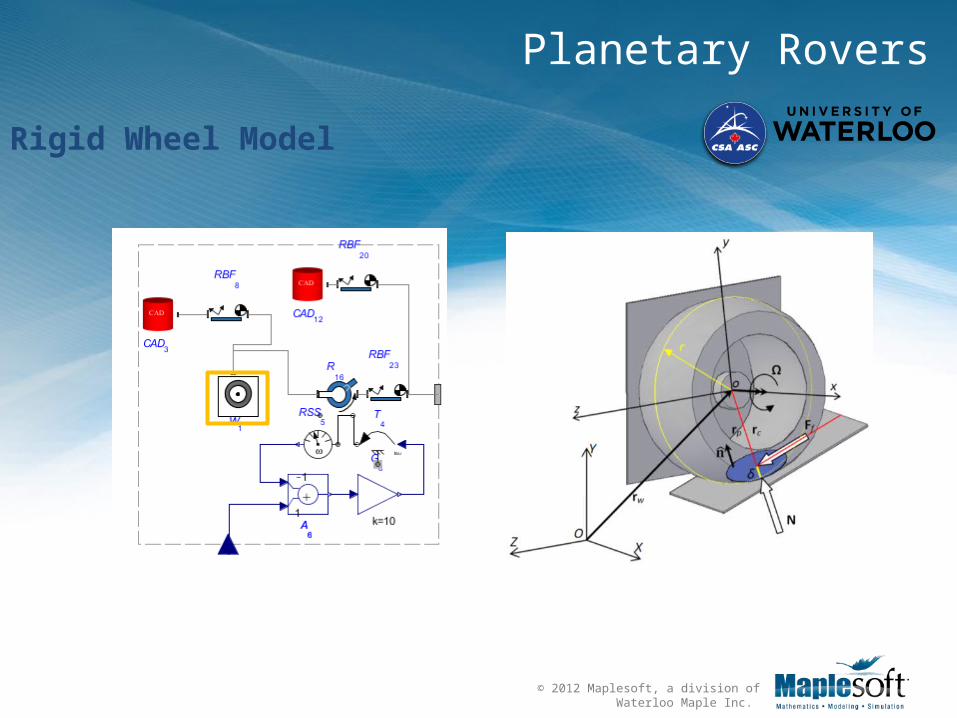
Planetary Rovers
Rigid Wheel Model
© 2012 Maplesoft, a division of Waterloo Maple Inc.
Planetary Rovers
MOVIE #3
Visualization in MapleSim
© 2012 Maplesoft, a division of Waterloo Maple Inc.
Planetary Rovers
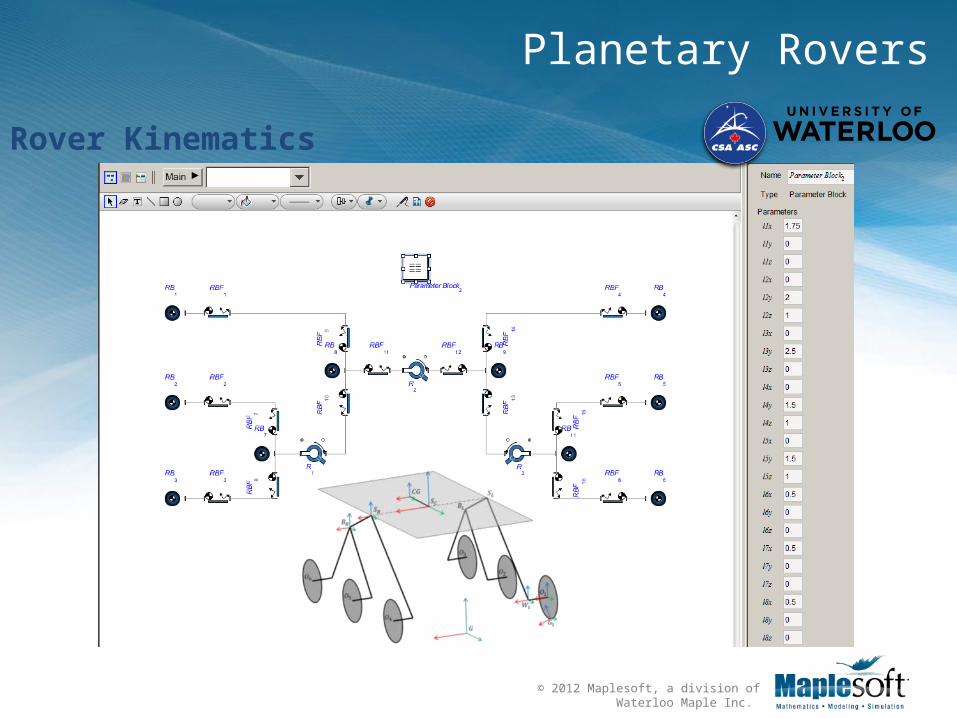
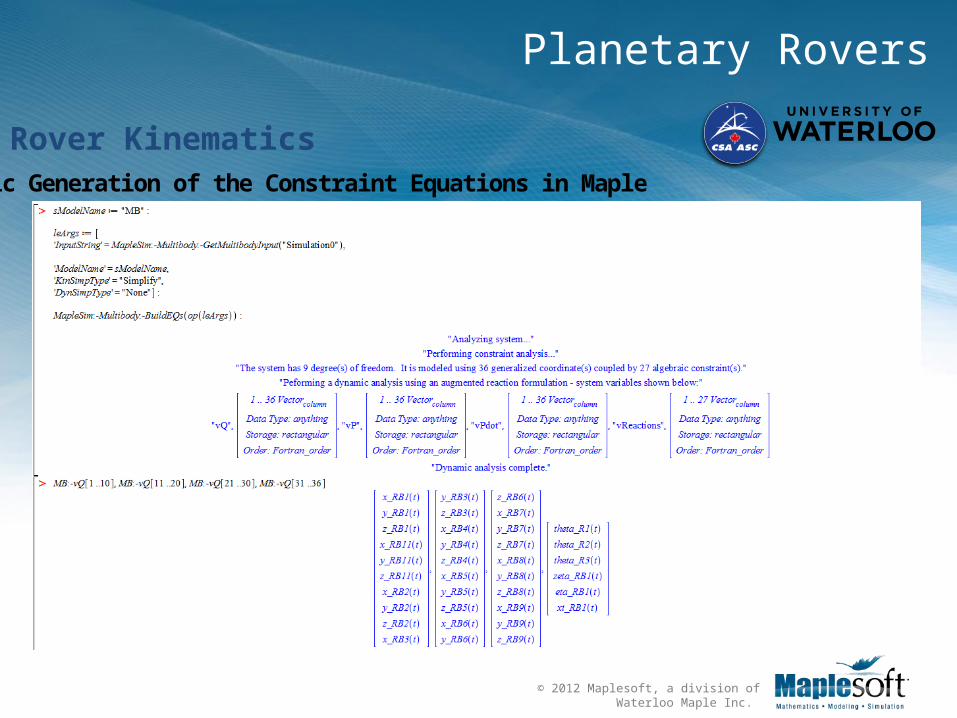
Rover Kinematics
© 2012 Maplesoft, a division of Waterloo Maple Inc.
Automatic Generation of the Constraint Equations in Maple
Planetary Rovers
Rover Kinematics
© 2012 Maplesoft, a division of Waterloo Maple Inc.
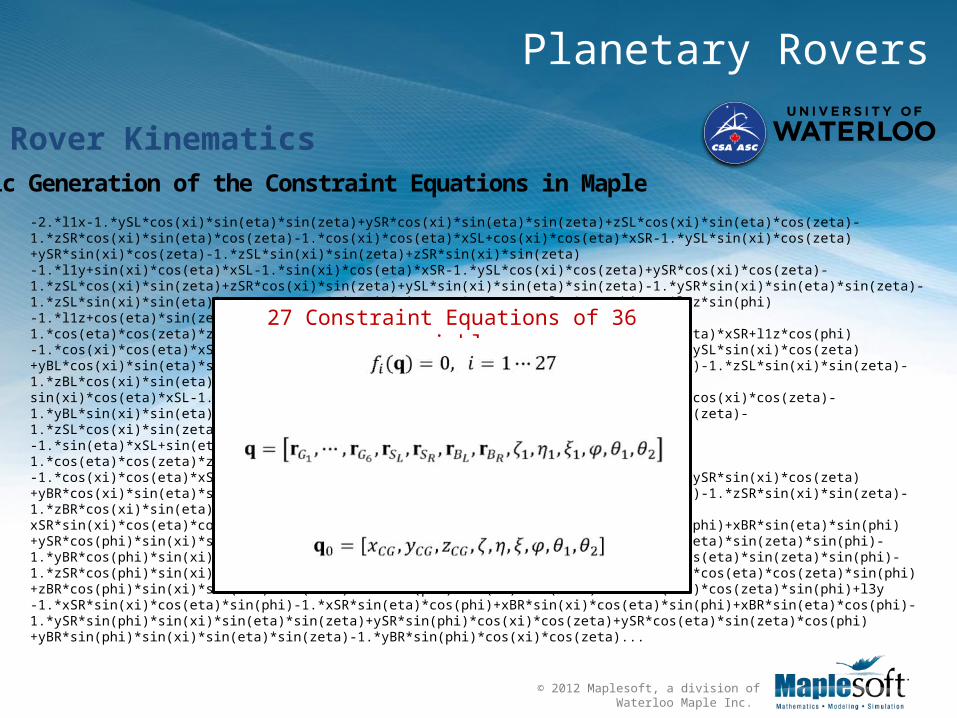
-2.*l1x-1.*ySL*cos(xi)*sin(eta)*sin(zeta)+ySR*cos(xi)*sin(eta)*sin(zeta)+zSL*cos(xi)*sin(eta)*cos(zeta)-1.*zSR*cos(xi)*sin(eta)*cos(zeta)-1.*cos(xi)*cos(eta)*xSL+cos(xi)*cos(eta)*xSR-1.*ySL*sin(xi)*cos(zeta)+ySR*sin(xi)*cos(zeta)-1.*zSL*sin(xi)*sin(zeta)+zSR*sin(xi)*sin(zeta)-1.*l1y+sin(xi)*cos(eta)*xSL-1.*sin(xi)*cos(eta)*xSR-1.*ySL*cos(xi)*cos(zeta)+ySR*cos(xi)*cos(zeta)-1.*zSL*cos(xi)*sin(zeta)+zSR*cos(xi)*sin(zeta)+ySL*sin(xi)*sin(eta)*sin(zeta)-1.*ySR*sin(xi)*sin(eta)*sin(zeta)-1.*zSL*sin(xi)*sin(eta)*cos(zeta)+zSR*sin(xi)*sin(eta)*cos(zeta)+l1y*cos(phi)-1.*l1z*sin(phi)-1.*l1z+cos(eta)*sin(zeta)*ySL-1.*cos(eta)*sin(zeta)*ySR-1.*cos(eta)*cos(zeta)*zSL+cos(eta)*cos(zeta)*zSR+l1y*sin(phi)-1.*sin(eta)*xSL+sin(eta)*xSR+l1z*cos(phi)-1.*cos(xi)*cos(eta)*xSL+cos(xi)*cos(eta)*xBL-1.*ySL*cos(xi)*sin(eta)*sin(zeta)-1.*ySL*sin(xi)*cos(zeta)+yBL*cos(xi)*sin(eta)*sin(zeta)+yBL*sin(xi)*cos(zeta)+zSL*cos(xi)*sin(eta)*cos(zeta)-1.*zSL*sin(xi)*sin(zeta)-1.*zBL*cos(xi)*sin(eta)*cos(zeta)+zBL*sin(xi)*sin(zeta)-1.*l3xsin(xi)*cos(eta)*xSL-1.*sin(xi)*cos(eta)*xBL+ySL*sin(xi)*sin(eta)*sin(zeta)-1.*ySL*cos(xi)*cos(zeta)-1.*yBL*sin(xi)*sin(eta)*sin(zeta)+yBL*cos(xi)*cos(zeta)-1.*zSL*sin(xi)*sin(eta)*cos(zeta)-1.*zSL*cos(xi)*sin(zeta)+zBL*sin(xi)*sin(eta)*cos(zeta)+zBL*cos(xi)*sin(zeta)+l3y-1.*sin(eta)*xSL+sin(eta)*xBL+cos(eta)*sin(zeta)*ySL-1.*cos(eta)*sin(zeta)*yBL-1.*cos(eta)*cos(zeta)*zSL+cos(eta)*cos(zeta)*zBL+l3z-1.*cos(xi)*cos(eta)*xSR+cos(xi)*cos(eta)*xBR-1.*ySR*cos(xi)*sin(eta)*sin(zeta)-1.*ySR*sin(xi)*cos(zeta)+yBR*cos(xi)*sin(eta)*sin(zeta)+yBR*sin(xi)*cos(zeta)+zSR*cos(xi)*sin(eta)*cos(zeta)-1.*zSR*sin(xi)*sin(zeta)-1.*zBR*cos(xi)*sin(eta)*cos(zeta)+zBR*sin(xi)*sin(zeta)+l3xxSR*sin(xi)*cos(eta)*cos(phi)-1.*xSR*sin(eta)*sin(phi)-1.*xBR*sin(xi)*cos(eta)*cos(phi)+xBR*sin(eta)*sin(phi)+ySR*cos(phi)*sin(xi)*sin(eta)*sin(zeta)-1.*ySR*cos(phi)*cos(xi)*cos(zeta)+ySR*cos(eta)*sin(zeta)*sin(phi)-1.*yBR*cos(phi)*sin(xi)*sin(eta)*sin(zeta)+yBR*cos(phi)*cos(xi)*cos(zeta)-1.*yBR*cos(eta)*sin(zeta)*sin(phi)-1.*zSR*cos(phi)*sin(xi)*sin(eta)*cos(zeta)-1.*zSR*cos(phi)*cos(xi)*sin(zeta)-1.*zSR*cos(eta)*cos(zeta)*sin(phi)+zBR*cos(phi)*sin(xi)*sin(eta)*cos(zeta)+zBR*cos(phi)*cos(xi)*sin(zeta)+zBR*cos(eta)*cos(zeta)*sin(phi)+l3y-1.*xSR*sin(xi)*cos(eta)*sin(phi)-1.*xSR*sin(eta)*cos(phi)+xBR*sin(xi)*cos(eta)*sin(phi)+xBR*sin(eta)*cos(phi)-1.*ySR*sin(phi)*sin(xi)*sin(eta)*sin(zeta)+ySR*sin(phi)*cos(xi)*cos(zeta)+ySR*cos(eta)*sin(zeta)*cos(phi)+yBR*sin(phi)*sin(xi)*sin(eta)*sin(zeta)-1.*yBR*sin(phi)*cos(xi)*cos(zeta)...
27 Constraint Equations of 36 variables
Planetary Rovers
Automatic Generation of the Constraint Equations in Maple
Rover Kinematics
© 2012 Maplesoft, a division of Waterloo Maple Inc.
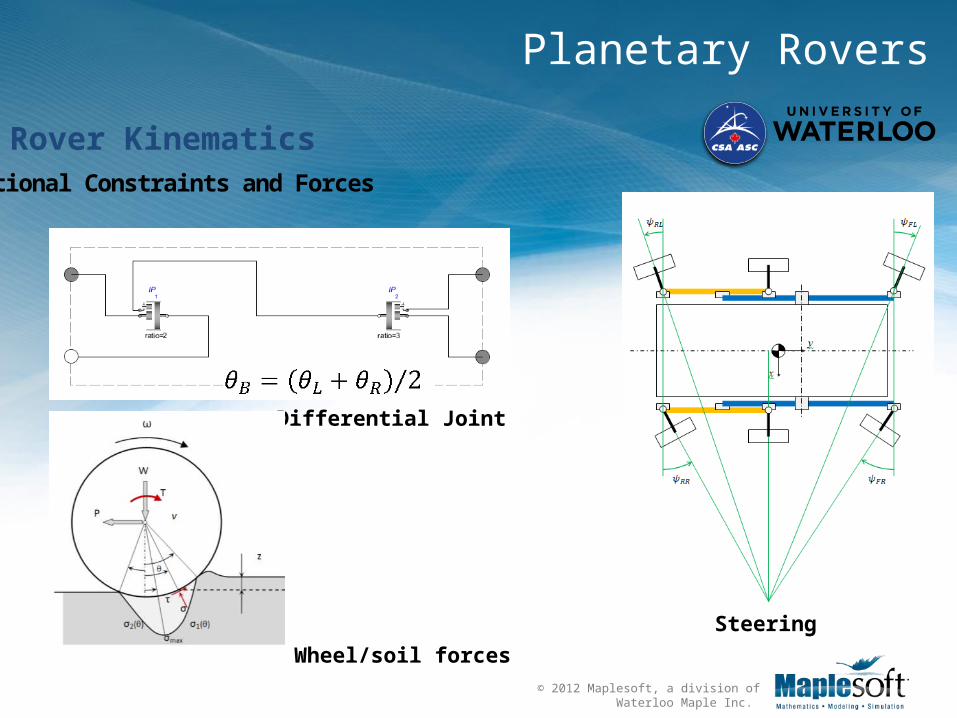
Differential Joint
SteeringWheel/soil forces
Planetary Rovers
Additional Constraints and Forces
Rover Kinematics
© 2012 Maplesoft, a division of Waterloo Maple Inc.
Planetary Rovers
MOVIE #4
Quasi-static Simulation using MATLAB®
Rover Kinematics
*Matlab is a registered trademark of The Mathworks, Inc.
© 2012 Maplesoft, a division of Waterloo Maple Inc.
Planetary Rovers
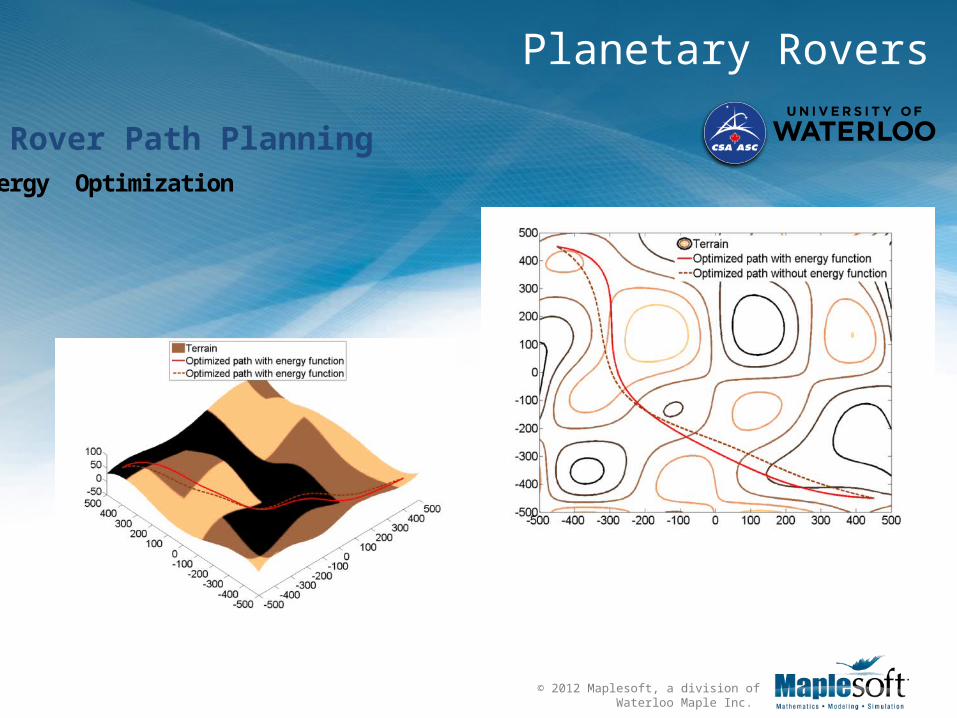
Energy Optimization
Rover Path Planning
© 2012 Maplesoft, a division of Waterloo Maple Inc.
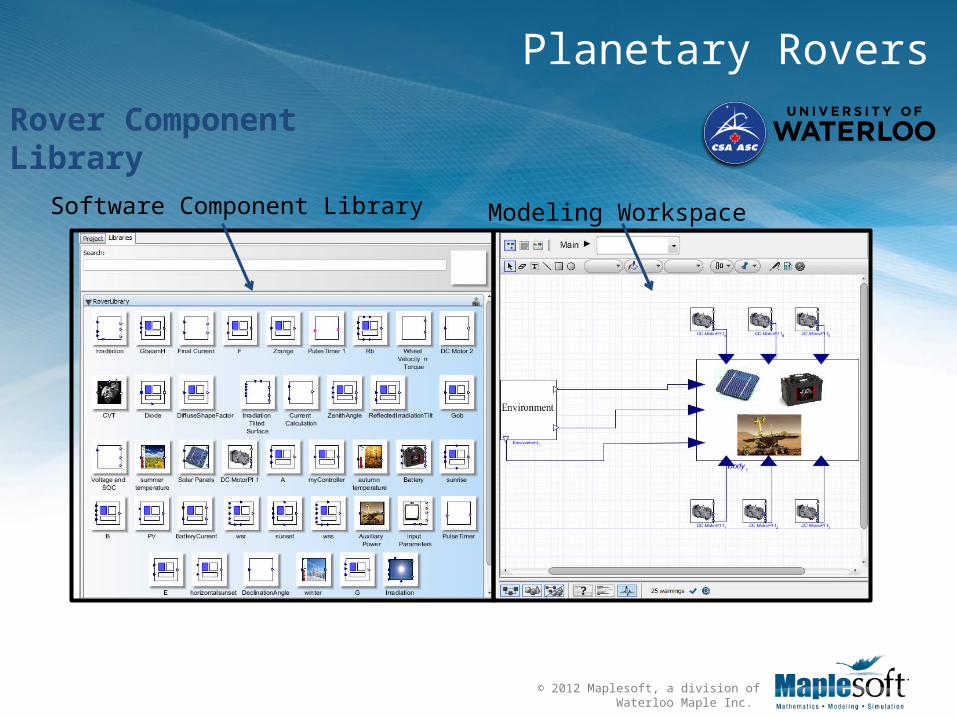
Software Component Library Modeling Workspace
Planetary Rovers
Rover Component Library
© 2012 Maplesoft, a division of Waterloo Maple Inc.
Planetary Rovers
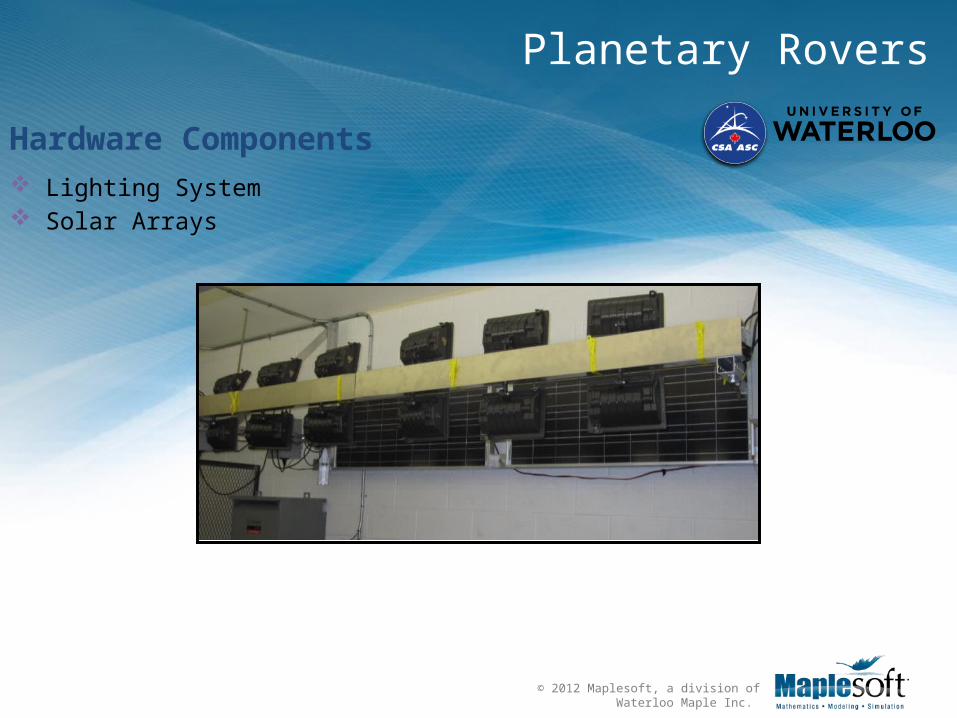
Lighting System Solar Arrays
Hardware Components
© 2012 Maplesoft, a division of Waterloo Maple Inc.
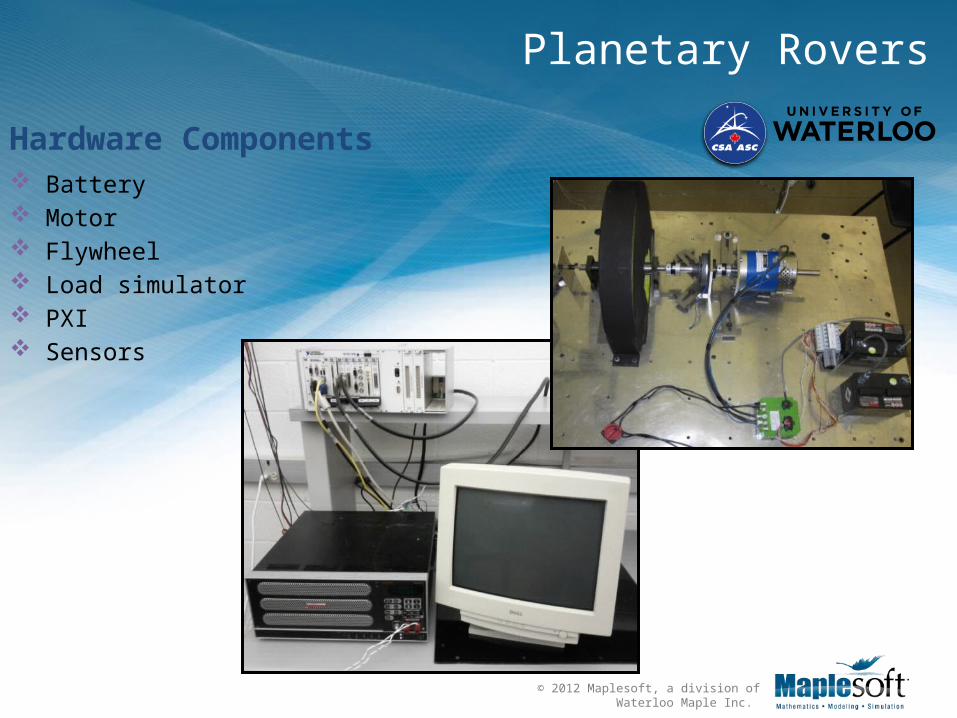
Planetary Rovers
Battery Motor Flywheel Load simulator PXI Sensors
Hardware Components
© 2012 Maplesoft, a division of Waterloo Maple Inc.
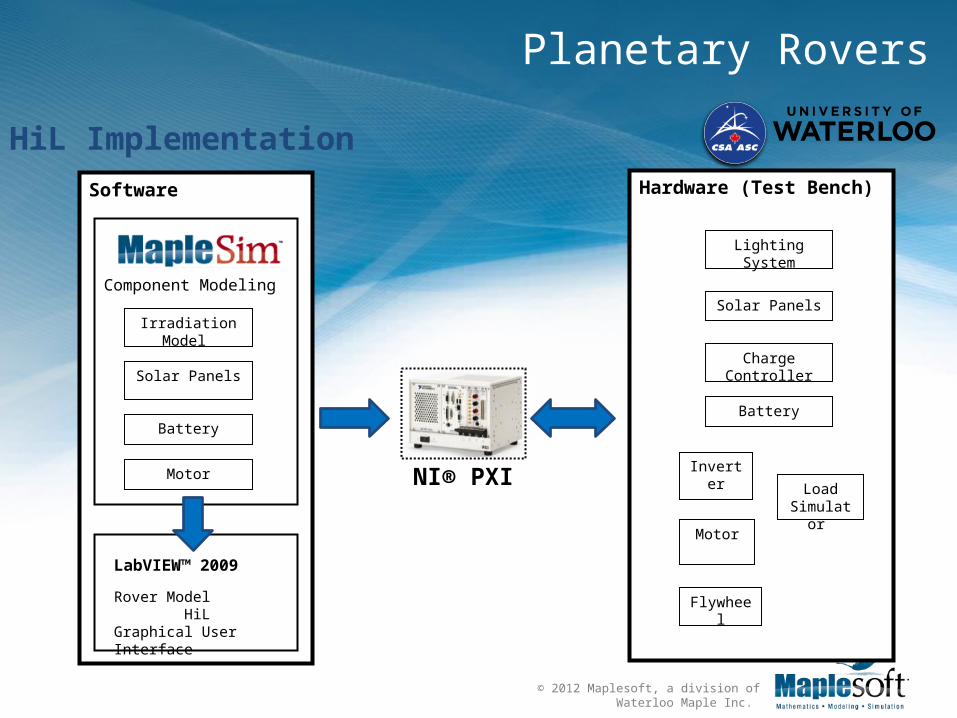
Software Hardware (Test Bench)
Lighting System
Solar Panels
Battery
Motor
Charge Controller
Inverter
Load Simulator
Flywheel
Component Modeling
Solar Panels
Battery
Motor
Irradiation Model
NI® PXI
LabVIEW™ 2009
Rover Model HiL Graphical User Interface
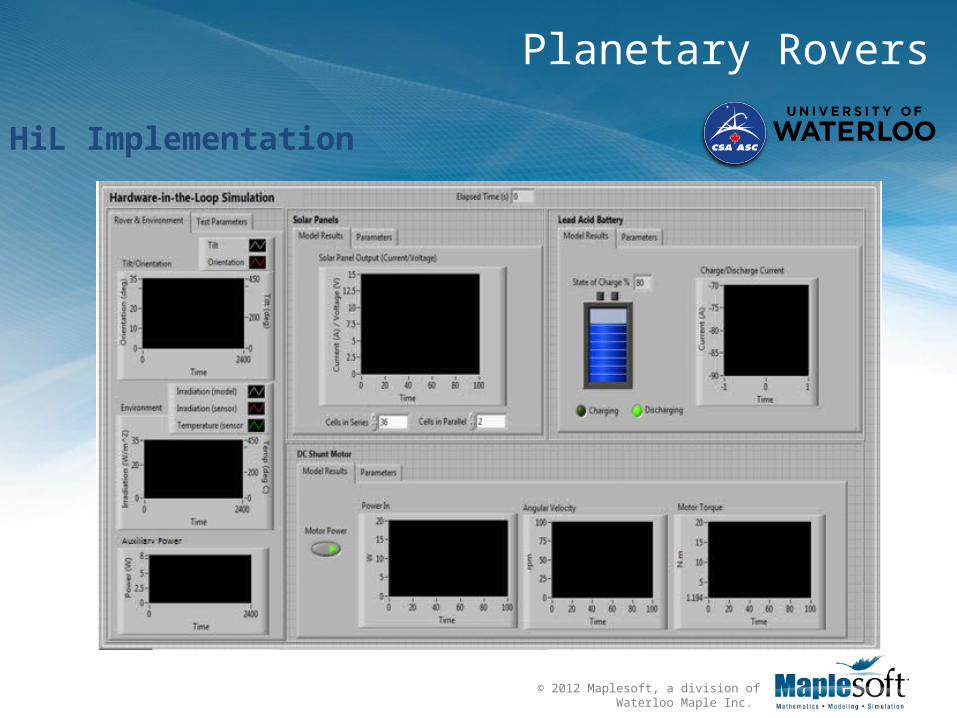
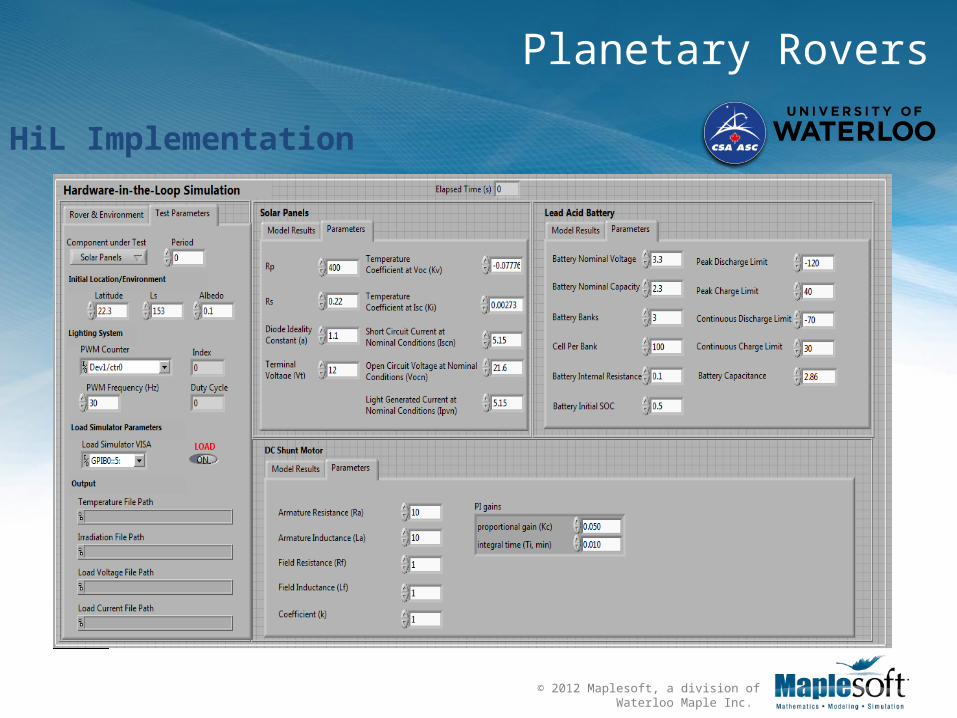
Planetary Rovers
HiL Implementation
© 2012 Maplesoft, a division of Waterloo Maple Inc.
Planetary Rovers
HiL Implementation
© 2012 Maplesoft, a division of Waterloo Maple Inc.
Planetary Rovers
HiL Implementation
© 2012 Maplesoft, a division of Waterloo Maple Inc.
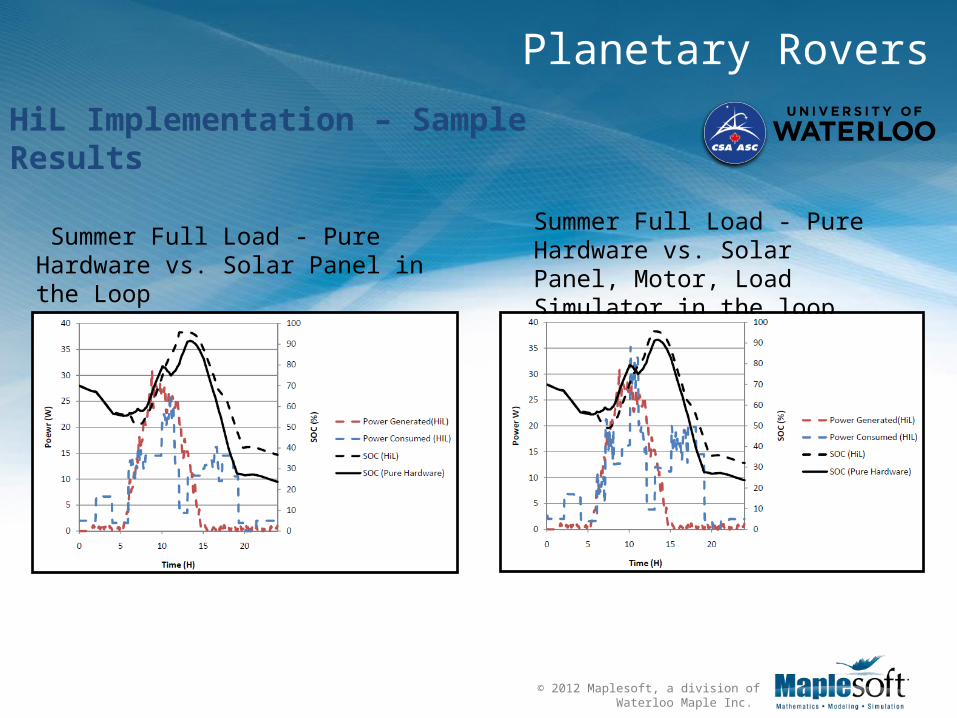
Summer Full Load - Pure Hardware vs. Solar Panel in the Loop
Summer Full Load - Pure Hardware vs. Solar Panel, Motor, Load Simulator in the loop
Planetary Rovers
HiL Implementation – Sample Results
© 2012 Maplesoft, a division of Waterloo Maple Inc.
What is MapleSim?
MapleSim is a truly unique physical modeling tool:
• Built on a foundation of symbolic computation technology
• Handles all of the complex mathematics involved in the development of engineering models
• Multi-domain systems, plant modeling, control design
• Leverages the power of Maple to take advantage of extensive analytical tools
• Reduces model development time from months to days while producing high-fidelity, high-performance models
© 2012 Maplesoft, a division of Waterloo Maple Inc.
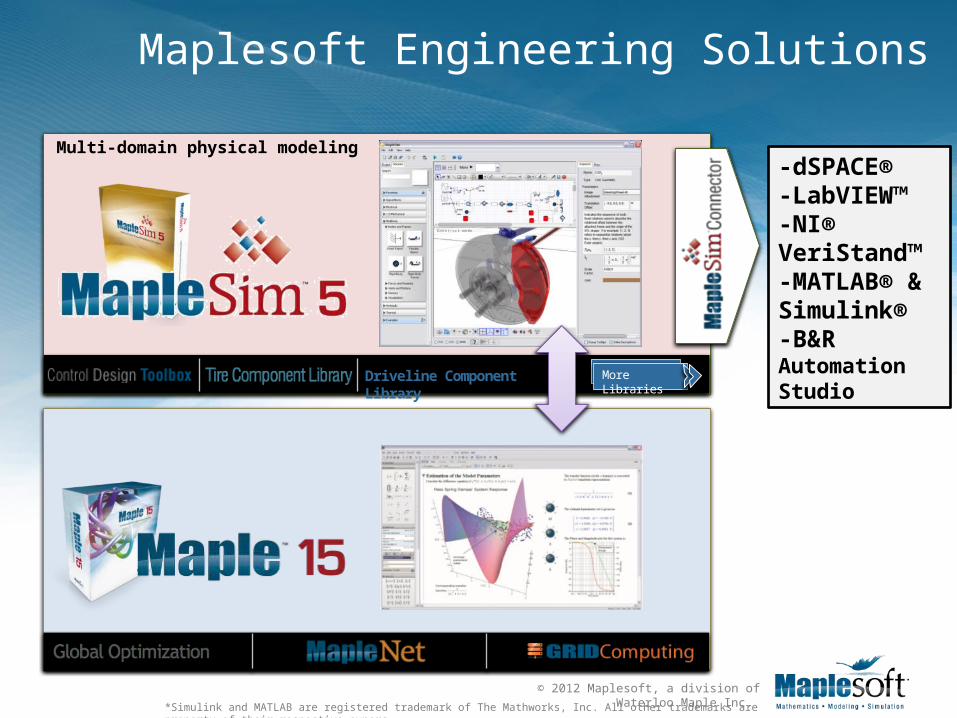
Maplesoft Engineering Solutions
Multi-domain physical modeling
Driveline Component Library
More Libraries
-dSPACE®-LabVIEW™-NI® VeriStand™-MATLAB® & Simulink®-B&R Automation Studio
*Simulink and MATLAB are registered trademark of The Mathworks, Inc. All other trademarks are property of their respective owners.
© 2012 Maplesoft, a division of Waterloo Maple Inc.
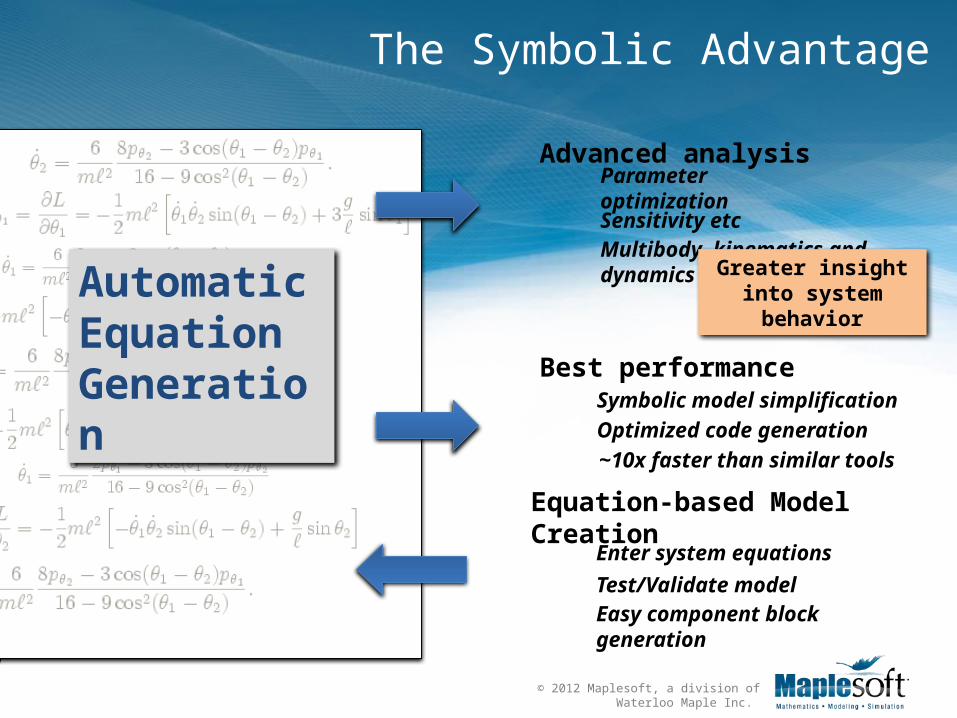
AutomaticEquationGeneration Symbolic model simplification
Optimized code generation
Best performance
~10x faster than similar tools
Advanced analysisParameter optimizationSensitivity etcMultibody kinematics and dynamics
Equation-based Model CreationEnter system equationsTest/Validate modelEasy component block generation
Greater insight into system behavior
The Symbolic Advantage
© 2012 Maplesoft, a division of Waterloo Maple Inc.
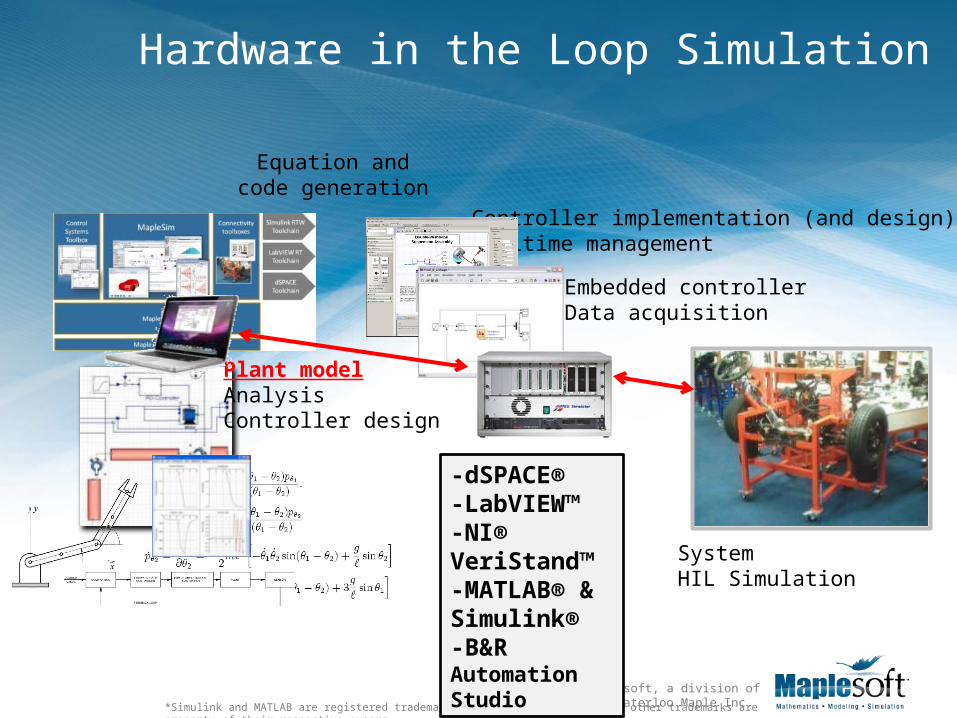
Hardware in the Loop Simulation
Plant modelAnalysisController design
Equation andcode generation
Controller implementation (and design)Realtime management
Embedded controllerData acquisition
SystemHIL Simulation
*Simulink and MATLAB are registered trademark of The Mathworks, Inc. All other trademarks are property of their respective owners.
-dSPACE®-LabVIEW™-NI® VeriStand™-MATLAB® & Simulink®-B&R Automation Studio
© 2012 Maplesoft, a division of Waterloo Maple Inc.
Key Takeaways...
• Physical modeling: increasingly important – and increasingly complex – in systems design, testing and integration.
• Symbolic technology: proven engineering technology that significantly improves model fidelity without sacrificing real-time performance.
• MapleSim: ideal tool for rapid development of high-fidelity physical models of mechatronics systems to help engineers achieve their design goals.
© 2012 Maplesoft, a division of Waterloo Maple Inc.
Thank You!
Questions?
To stay connected: www.maplesoft.com/subscribe





























