Embed Size (px)
Citation preview

© 2008 EU-MOP Consortium
Integrated EU-MOP System Design
Madrid, Spain 24 January 2008
Yiannis Ventikos Dept. of Engineering ScienceUniversity of Oxford

© 2008 EU-MOP Consortium
Specification of the EU-MOP system
“A scalable number of autonomous vessels, operating in a coordinated manner, capable to combat a variety of oil-spills in a multitude of marine environments”

© 2008 EU-MOP Consortium
System vs. Unit Design
The EU-MOP design process has been an unusualengineering task:
We have put together a system aimed at fulfillinga pre-specified task; The units comprising the system are complex devices with specificationsthat are part of the design effort.
System Level(strategic/operational)
Unit Level(technical)

© 2008 EU-MOP Consortium
System
Unit
EU-MOP design levels
Strategic

© 2008 EU-MOP Consortium
Conceptual design approach
Input information• Oil spill characteristics
– Oil types– Age– Spill dimensions
• quantity/volume• surface area,
shape– Spill distribution
• Environmental conditions
Determine • Preliminary design
– Unit volume, weight– Main characteristics– Manufacture
materials• Power consumption
DecideMost probable operating policy
Action Time
Number of Drones
Nantes Meeting, June 2005

© 2008 EU-MOP Consortium
Catamaran integrated design

© 2008 EU-MOP Consortium
Strategic level
?
N
???
?
?Type 1 = ?Type 2 = ?Type 3 = ?Type 4 = ?
Type 1 = ?Type 2 = ?Type 3 = ?Type 4 = ? Type 1 = ?
Type 2 = ?Type 3 = ?Type 4 = ?
Type 1 = ?Type 2 = ?Type 3 = ?Type 4 = ?
Type 1 = ?Type 2 = ?Type 3 = ?Type 4 = ?
Type 1 = ?Type 2 = ?Type 3 = ?Type 4 = ?

© 2008 EU-MOP Consortium
Strategic level
Type 2:
14 units
Type 4:
2 units
Units allocation for confronting spillsin the south of Spain (Mediterranean)

© 2008 EU-MOP Consortium
System/swarm level
?
EU-MOP Artificial Intelligence needs to perform systems operations:
search-and-follow the slick decide on optimal collection strategy loading and unloading sequences, etc…

© 2008 EU-MOP Consortium
Unit levelTwo design classes: Catamaran & MonocatThree sizes: Large – Medium – Small
Large catamaran Large monocat
Small EU-MOP

© 2008 EU-MOP Consortium
Design of catamaran EU-MOP
Main features:
Autonomy 24hEnergy production Diesel GeneratorOil recovery Folding belt skimmer + oil storage tankPropulsion 2 x Azimuthing thrustersTrim adjustment No ballasts
Large EU-MOP model
Length 3.20 mBreadth 2.30 mFore hull clearance 0.95 mDraught
0.93 mDisplacement (full-load) 3563 kg
Medium EU-MOP model
Length 3.00 mBreadth 1.88 mFore hullclearance 0.68 mDraught
0.80 mDisplacement (full-load) 2582 kg

© 2008 EU-MOP Consortium
MONOCAT - Large
Principle characteristics
LOA 3.5 mLWL 3.5 mBOA 2.3 mDepth 1.3 mFore hullclearance 1 mAir draft 3.45 m
Other features:
Autonomy 24hEnergy production Diesel GeneratorOil recovery Folding belt skimmer + 2m3 oil tankPropulsion 2 x Azimuthing thrustersTrim adjustment 2x 125l water ballastsAnti capzising volume (mast)
Design of monocat EU-MOP

© 2008 EU-MOP Consortium
MONOCAT - Large
Hydrostatics & stability (preliminary)
Displ (kg) Wetted Draft (m) surf (m²)
Lightship 1735 13.2 0.4550% Load 2730 15.6 0.60100% Load 3335 17.5 0.72
Hull Design features:
- Allows for skimmer fitting and good oil canalization.- Provides enough volume for oil storage and equipment fitting.- Minimize drag.- Minimised change in draft with increasing loading. - Centre of volume located slightly aft for minimizing trim with increasing loading.
Design of monocat EU-MOP

© 2008 EU-MOP Consortium
MONOCAT - Medium
Principle characteristics
LOA 2.4 mLWL 2.4 mBOA 1.9 m Depth 1.10 mFore hull clearance 0.7 mAir draft 2.13 m
Other features:
Autonomy 24hEnergy production Diesel GeneratorOil recovery Folding belt skimmer +
1.4 m3 oil tankPropulsion 2 x Azimuthing thrustersTrim adjustment 2x 90l water ballastsAnti capzising volume (mast)
Design of monocat EU-MOP

© 2008 EU-MOP Consortium
MONOCAT - Medium
Hydrostatics & stability
Displ (kg) Wetted Draft (m) surf (m²)
Lightship 1180 8.4 0.4850% Load 1750 9.8 0.65100% Load 2280 12.4 0.80
Hull Design features:
Parametric scaling from Large unit’s Hull with specific targets:-Length constrained by 40’ container size-Increased freeboard / Length ratio-Increased Breadth / Length ratio
Design of monocat EU-MOP

© 2008 EU-MOP Consortium
Design of small EU-MOP
DimensionsLOA: 1.20 m - BOA: 1.10 m - Depth: 0.7 mMax speed: 3 kts - recovery speed: 0.7 kts
Energy systemBattery pack type: LiFePO
Propulsion system2 x fthrustersTo be determined
Small Unit - presentationOil tank capacity: 0.19 m3
Skimmer typeRo Clean – DBD 5Single bank of 10 discs – 295 mm DiameterRecovery capacity (max): 5-7 tonnes / hr

© 2008 EU-MOP Consortium
Unit design: propulsion resistance
EU-MOP Novel Designs
No documented resistance correlations
Accurate estimation Towing tank model tests
Study of oil/emulsion effects CFD simulations
Speed (Knots)
Catamaran Monocat
Resistance (N) Eff power (W) Resistance (N) Eff power (W)
1 49 25 18 9
2 186 192 69 70
3 520 806 185 283
4 1138 2333 396 810
5 2217 5654 1010 2585

© 2008 EU-MOP Consortium
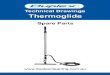
Fouling and oil-layer simulations
5 cm
Vis
cosi
ty in
crease
900%
Resistance increase 21.5%
Estimate the resistance increase when:Navigating through floating oil film of 5 cm

© 2008 EU-MOP Consortium
Unit design: energy source
EU-MOP Power (kW)
Selection
Catamaran Monocat
Large
Propulsion
- 2xSeaEye SM7
2xDSSI 2100 (SEA MAX TH-
2100)
Total - 5.0 kW 3.0 kW
Medium
Propulsion
- 1xKOHLER 8EOZD
2xDSSI 2100 (SEA MAX TH-
2100)
Total - 8 kW 1.5 kW
Small
Propulsion
1 ? ?
Total 1.87 ? ?

© 2008 EU-MOP Consortium
Unit design: propulsion & steering
Connection to Propulsion MotorConnection to Propulsion Motor
Teflon Face
Sealed Thrust Race
Grub Screw
Bearing Retention Ring
Locking Screw
Steering Drive Shaft
Needle Bearing

© 2008 EU-MOP Consortium
Unit design: large catamaran manoeuvring
Effect of SpeedEffect of Speed
Effect of Loading ConditionEffect of Loading Condition60 NDA
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
-1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5
X/L
Y/L
0.50 knots Full2.00 knots Full0.50 knots Light2.00 knots Light
Loading Condition: Unloaded + %10 Fuel
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
-1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5 4
X/L
Y/L
0.50 knots 60 NDA2.00 knots 60 NDA5.00 knots 60 NDA
Loading Condition: Fully Loaded
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
-1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5
X/L
Y/L
0.25 knots 60 NDA0.50 knots 60 NDA1.00 knots 60 NDA2.00 knots 60 NDA5.00 knots 60 NDA
NDA: Nozzle Deflection Angle (°)
Effect of Nozzle Deflection AngleEffect of Nozzle Deflection Angle
Loading Condition: Fully Loaded
0
1
2
3
4
5
6
7
-3 -2 -1 0 1 2 3 4 5
X/L
Y/L
2 knots 35 NDA2 knots 60 NDA
5 knots 35 NDA5 knots 60 NDA

© 2008 EU-MOP Consortium
Unit design: Artificial Intelligence
Controls and sensors DGPS Obstacle detection / collision avoidance system Depth sensor Compass Oil-in water sensor Level indicators for fuel & storage tanks Radio-based communication system Embedded control processor/computer

© 2008 EU-MOP Consortium
EU-MOP storage/logistics
Catamaran Monocat
Container Large Medium Large Medium
40ft 3 4 3 5
20ft 1 1 1 2

© 2008 EU-MOP Consortium
Outlook and Future Challenges
The EU-MOP system presents us with a series ofunique features in terms of versatility, scalability,efficiency and user-friendliness.
The EU-MOP project has produced a preliminarydesign that spans the system-to-unit range andsets the ground for further development of theconcept.
The ground is ripe for moving to the next stage:finalising a prototype design and runningtesting to demonstrate the advanced featuresof the EU-MOP concept.