Embed Size (px)
DESCRIPTION
rock slope risk assessment
Citation preview

Landslides (2011) 8:221–231DOI 10.1007/s10346-010-0246-4Received: 16 March 2009Accepted: 1 November 2010Published online: 2 December 2010© Springer-Verlag 2010
Anna M. Ferrero I Maria Migliazza I Riccardo Roncella I Elena Rabbi
Rock slopes risk assessment based on advancedgeostructural survey techniques
Abstract The rock mass structure determines the possibleunstable blocks that can induce rock fall phenomena. The stabilityanalyses must therefore be based on an accurate geo-structuralsurvey. In this work, the stability conditions of several steepslopes along a motorway in the Far East have been evaluatedthrough key block analysis based on traditional surveys and onlaser scanner acquisitions. Discontinuity orientations and posi-tions on the rock face are derived from the point cloud in order toperform the reconstruction of the rock mass and to identifyblocks in the slope. Results obtained from both the traditionaland the new method is in good agreement. Stability analyses havebeen performed for evaluating the kinematic feasibility of differ-ent failure mechanisms. The rock block shapes and volumes arecomputed by performing 2D and 3D analyses whereas the failuremechanisms are examined using the key block method. Para-metrical analyses have been carried on to evaluate the influenceof slope angle variation. DEM models have also been set up. Therelative hazard is determined by statistically evaluating thekinematical feasibility of different failure mechanisms. Hazardmapping has been utilized to identify the best methodology forrisk mitigation.
Keywords Rock slopes . Risk assessment . Advancedgeostructural survey techniques
IntroductionIn mountainous regions, transportation corridors are oftensusceptible to landslides and, in particular, rock falls constitutea major hazard in numerous rock cuts. This is the case illustratedin this work, which concerns a highway segment in NorthMalaysia (Fig. 1), about 5 km long, excavated through eight slopesand affected by several rock falls that produce a possible risk forhighway users.
The aim of the study was to establish the prevailing rockmass characteristics in the eight slopes for the evaluation ofinstability phenomena based on a traditional geostructural surveycoupled with Light Detection and Ranging (LIDAR) technology, inorder to assess the relative hazard for the slopes, thus providingrecommendations for remedial works.
The analyzed rock slopes have been excavated by blastingtechnique and are made up by very steep berms of 10 m heightswith global extension varying between 70 and 760 m in length and30 and 135 m in height. Protection system and consolidation workdesign needs the slope hazard evaluation in order to determineoptimal works and priority interventions.
Due to the large dimensions of the slope, traditional compasssurveys have been coupled with advanced techniques in order to obtaingeo structural information even without direct access to the rock mass.
A detailed 3D model of the rock slope topography (digital surfacemodel, DSM) has been acquired by laser scanning that allows theacquisition of a very large number of measurements points forming a“cloud of points”.
Acquired data have than been treated by applying the RANdomSample Consensus (RANSAC) algorithm (Fischler and Bolles 1981), thatallows the segmentation of the point cloud into subsets, each made ofpoints measured on a discontinuity plane of the rock face. For eachsubset, the plane’s equation coefficients are first determined by robustestimation and then refined by least-squares estimation after outlierremoval. The segmentation algorithm has been implemented insoftware specifically developed, ROCKSCAN (Ferrero et al. 2008) tofacilitate the interaction with the point cloud in the identification of thediscontinuities by a virtual projection of the three-dimensional (3D)data on a geo-referenced digital image of the slope.
In this way, selecting a rock mass portion directly on thephotographs by either a manual or an automatic system, the codesubdivides the area in point subsets belonging to single planes ofdiscontinuity. The code computes each equation orientation and otherrelevant geometrical data of the plane.
Each slope has been scanned by two different laser scanningsurveys. Thefirst onewas performed on the entire slope surface in orderto determine the global slope DSM (Fig. 2a). A second survey with highprecision (Fig. 2b), was carried out on smaller slope portions (10×10 mwindows). The number of high precision windows for each slope wasproportional to the slope dimension and to the rock mass structuralfeatures.
Data acquired with the two different approaches (compass andLIDAR) have beenmerged together in a consistent data set and are thenstatistically treated. This has led to recognition of typical discontinuitiesfor each slope describing them from a geomechanical point of view.
Once both the topography of the slope and the geo-structure weredetermined, stability analyses were performed using the key blockmethod. The different possible kinematic modes (planar and wedgesliding, toppling) were determined and factors of safety and volumes ofthe possible unstable blocks calculated. An example of the stabilityanalysis based on a complete rock mass geometrical reconstruction isalso presented.
An index of stability has then been applied in order to assess a levelof relative hazard for the different slopes. This index has been definedintroducing parameters such as geometrical characteristics of the slopesand of the berms, global stability and stability of the berms, presence ofwater, and presence of protections. On this base remedial work,typologies have also been suggested.
The words “joint”, “fracture”, and “discontinuity” are used in aninterchangeable way in the text.
The methodological approach followed for stability analysesdescribed in this paper is shown in Fig. 3.
Geostructural studies
Geological settingThe slopes are composed of porphyriticbiotite granite of TriassicAge belonging to the Kledang Range. Quartz veins, aplite dykes,and pegmatites of variable orientation and size are also presentwithin the granite rock.
Landslides 8 & (2011) 221
Original Paper

A variety of structural discontinuity planes cut the graniticrock; the discontinuity planes are of variable orientation, spacingand extent and they produce rock blocks of variable size andshape. The slopes belong to the same geological domain althoughthey show a different weathering degree: fresh to slightlyweathered granite rock is only exposed in the lower benches ofthe selected slope cuts, the upper benches being excavated inmoderately to completely weathered rock.
Geostructural survey
Traditional methodsGeological-geostructural mapping was carried out for the eightslopes through the definition of geostructural domains and thegeomechanical description of the rock mass (Ferrero et al. 2007).
For each slope, a preliminary geometric description was givenwith the definition of geostructural domains and principal jointsets (Fig. 4); then, a series of geostructural surveys along scanlinesof 10 m lengths were performed.
More than 50 geostructural traverses were performed with atotal of about 2,400 discontinuities collected in terms of
orientation (dip, dip direction), spacing, persistence, roughness,general condition (alteration, aperture, filling) according to ISRMsuggested method (1978).
In order to identify the predominant joint sets, all datacollected were statistically analyzed separately for each traverseand together for the eight different slopes, using a commercialcode (DIPS, Rockscience). The combined use of these toolspermitted the determination of dispersion around the meanvalue, in terms of a cone of confidence for each family of joints.
Fig. 1 Profile of one (W4) of the eight slopes present along the highwaysegment
Fig. 2 Solid model obtained by laser scanning of the slope W4: a whole slope, b high precision survey on a berm window
GPS LIDAR
Georeferenced
Points
Compass on traverse
Clouds of
Georeferenced Points
Georeferenced
Digital Image
ROCKSCAN
3D Digital Terrain
Georeferenced Model
Geological and
Geostructural Survey
Statistical Analysis
Joint sets definition
Stability Analysis Editing
protection
measures
Rock Fall Hazard Maps
Propose of typological remedial works
Fig. 3 Methodological flow chart
Original Paper
Landslides 8 & (2011)222

During the traditional survey, in situ observations of localinstabilities, water presence, and existing protective structureswere noted separately to be compared with and for integrating theresults of the surveys.
Laser scanner surveyThe DSM generation for the eight slopes has been obtained byusing the LIDAR terrestrial laser scanner technique, which utilizesa system consisting of a laser telemeter and a scanning mechanism.A pulse emitted from the laser source is reflected by the object
surface, its echo is captured by the optics: measuring the time-of-flight, the sensor-to-object distance is computed. Terrestrial lasersare equipped with two mirrors mounted on two orthogonal axes;when the instrument is leveled, the synchronized rotation providesscanning in azimuth and zenith. The polar coordinates of the targetare then converted to a local Cartesian frame with theorigin in theinstrument center, z-axis vertical and x-axis in an arbitrarydirection. Point clouds of rock faces, (operating ranges of lasersare from 100 to 800 m and more), with accuracies of the 3Dcoordinates in the range 5 10−3÷3 10−2 m and a scanning role from2,000 to 12,000 pts/s have been obtained. Angular scanningresolutions are in the order of 100 mrad and allow for a very highsampling density on the object in relatively short acquisition times,resulting in millions of points measured on the object surface.
The survey of the slopes was carried out with a Riegl LMS-Z420i with a calibrated Nikon D70 digital camera mounted on it.During the survey, many scan positions were adopted in order toavoid hidden zones. In addition, in each slope two different surveyresolutions were adopted:
for the general description of the slope, a point every 0.05×0.05 m2 was acquired, while for taking the digital images a20 mm calibrated focal lens was used;a detailed survey was carried out in zones, having a dimensionof 10×10 m (a point every centimeter, 84 mm lens).
The examined slopes have been excavated by means of blastingtechniques (Fig. 4). Therefore, the free surfaces of discontinuitiespresent very little contrast and the survey requires high point densityand digital images having a very high resolution.
Fig. 4 Principal joint sets observed on one of the eight rock slopes (W4)
Fig. 5 Positions of surveyed planes, by using RockScan program, in one of the survey window
Landslides 8 & (2011) 223

A local network has been implemented, documented, andsurveyed by means of a fast static GPS survey with a Trimble4,000 ssi double-frequency receiver and a Trimble 4,600 single-frequency receiver, in order to provide reference points togeoreference the scanning.
From these points, a topographic survey was carried out bymeans of a Leica TC 1,105 total station to connect the reflectingtargets placed on the rock slope to the reference vertices. In this way,it was possible to convert all the local measurements into a mappingsystem and reference all data to the north direction.
The laser scanner supplies the coordinates of points in space.The next step to realize a geometrical model of the rock mass is thedetermination of the discontinuity planes. For this purpose, pointshave to be divided into groups belonging to a single plane. In otherwords, the point cloud has to be analyzed in order to identify thepoints belonging to each discontinuity plane existing in the slope.For this purpose, laser scanner measurements have been super-imposed onto images of the slope in order to determine both slopegeometry and identify rock discontinuities by means of a softwarecalled ROCKSCAN developed by the authors (Fig. 5). This tool isbased on a segmentation algorithm capable of identifying thenumber of planes present in a point cloud and compute theirgeometrical parameters. By knowing the plane equation, dip and dipdirection of each plane can be computed. A detailed description ofthe applied survey technique is given in Ferrero et al. (2008) where adescription of the software ROCKSCAN developed by the authors isalso given.
The accuracy (i.e., the degree of closeness of measurements of aquantity to its true value) of the dip and dip direction estimation bymean of non contact method of survey (laser scanning or photo-
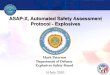
grammetry) has been analyzed with mathematical and stochasticmodels to define it as a function of the most relevantparameters: the accuracy on 3D coordinates of the pointssurveyed on the discontinuity plane, the orientation, the sizeand the shape of the plane respect to the direction of thesurvey, and the number of points measured per unit area ofthe surveyed discontinuity. In this approach, the discontinuityplane (Fig. 6) is represented by a rectangular surface havingthe base b fixed and the ratio b/h (where h is the rectangleheight) varying from 1/5 to 5 to represent elongated shapes inheight and width (as well as a square). The measurementpoints are distributed on the rectangle on a square grid with apoint density k ranging in 10–100% (the percentage is referredto the shortest rectangle side). The number of grid pointsmeasured on each rectangle is a function of grid spacing andthe point density increases with the factor k and the rectangleheight decreases (table in Fig. 6). The accuracy of dip and dipdirection, as a function of measurement accuracy, has beencomputed by variance propagation within a generalized leastsquares model:
Dy ¼ Ax þ d
with parameters x and observables y (Felus 2006).Without loss of generality, the equation of a plane through
the origin ax þ by þ cz ¼ 0 has been considered; the functionalmodel is of the form F(y, x)=0 and must be linearized with
rectangle base b = 1; grid spacing = k*min(b,h)
rectangle height h 0.2 1 5
grid spacing (k=0.1) 0.02 0.1 0.1 # pts 561 121 561grid spacing (k=0.2) 0.04 0.2 0.2 # pts 156 36 156grid spacing (k=0.5) 0.1 0.5 0.5 # pts 33 9 33grid spacing (k=1) 0.2 1 1 # pts 12 4 12
Topographical survey direction
Fig. 6 Geometrical discontinuity plane characteristic and point density valueconsidered to define the accuracy of the orientation plane definition
0
0.2
0.4
0.6
0.8
1
1.2
1.4
10 20 30 40 50 60 70 80 90
Dip
acc
ura
cy [
deg
]
DIP [deg]
12 pts33 pts156 pts561 pts
12 pts33 pts156 pts561 pts
a
0
1
2
3
4
5
6
7
10 20 30 40 50 60 70 80 90
Dip
Dir
ecti
on
acc
ura
cy [
deg
]
DIP [deg]
b
Fig. 7 Dip (a) and dip direction (b) accuracy computation for a rectangular shape(h=5 and b=1) of discontinuity plane for different value of plane inclination (dip)and point density
Original Paper
Landslides 8 & (2011)224

respect to the observables as well as with respect to theparameters. We have therefore:
D ¼ @F@y ; A ¼ � @F
@x; d ¼ �F xo; yoð Þ
where D contains the parameters of the plane and A thecoordinates of the points which define the plane, while xo, yoare respectively approximations of parameters and point coor-dinates. The stochastic model is defined by the covariance matrixof the observations CYY, which is taken as block diagonal,neglecting correlations between measurement points.
The theoretical accuracy of the parameters is given by thecovariance matrix CXX computed by covariance propagation:
CXX ¼ At DCYYDtð Þ�1A� ��1
The orientation of the plane unit normal vector (pole)pointing upwards can be expressed as a function of the plane’scoefficient as
dip ¼ arccosðcÞ dip direction ¼ k� arctan a; bð Þwhere k is 0° or 180° depending on the quadrant. The accuracy ofdip and dip direction determination can be derived by a newerror propagation, with the full covariance matrix CXX.
The analyses carried out have been shown as the accuracy ofdip depends only on the accuracy of the z component of thevector normal to the plane, while the accuracy of dip directiondepends on the accuracy of both the x and y components (but xand y components accuracies are strongly influenced by the zcomponent itself). Consequently, the accuracy in estimating theplane dip direction is strongly influenced by the plane dip anglefor nearly horizontal planes (below 30°) as well. To evaluate the
accuracy value obtainable for both dip and dip direction, severalsimulations have been performed, using different shapes andsize plane and density of points on the face plane. The resultsshow as the accuracy always increases with a higher pointdensity. The dip accuracy, it strongly depends on the shape ofthe plane and less from the dip value of the plane; while, the dipdirection accuracy depends on both shape and dip value of theplane. In Fig. 7, an example of the result obtained is illustrated.In this case, the results regard a rectangular shape of the planeand the dip and dip direction accuracies are referred todifferent values of plane inclination (dip) and number of pointsin the plane.
One can observe as the error in the estimation of the planeorientation decreases with plane dip. It is necessary to note thatthe values of mean square error have been obtained byconsidering an horizontal survey direction; the relation betweenthe measure error and the dip value is correlated to thedirection of the survey in relation to the slope direction (forinstance if the survey is vertical the error is higher for verticalplanes and minimal for horizontal planes).
Graphs similar to those reported in Fig. 7 have beendeveloped for planes with different shapes and orientations forthe design of a laser scanning survey with a known accuracy. Inthis way, the survey orientation with respect to the rock slopeand the point density to be measured can be defined.
For what it concerns persistence, spacing and discontinuityposition in the space, the code ROCKSCAN allows to determineall geometrical characteristics of each identified plane and trace.In particular, persistence can be computed by the code byselecting two opposite extreme points on the rock face.
Spacing can be defined in two ways: the first one simulatesthe classical compass survey along scanline by reproducing avirtual scanline on the photographs and counting the distanceof each intersected plane by an interactive tool; the second way
Compass survey LIDAR survey Major joint sets Dip Dip Direction Dip Dip Direction
J1 76 242 77 241 J2 72 006 88 195 J3 37 192 44 224
Slope 88 200 88 200
(a) (b)
Fig. 8 Joint set identification determined by the compass survey (a) and by laser scanner DTM (b) on the same zone of the slope: slope W4–traverse 3 (lowerhemisphere)
Landslides 8 & (2011) 225

is to select two discontinuities between which the codecomputes the minimum distance in mathematical way. Theplane localization is done automatically by the code knowingthe 3D coordinate of the plane centroid.
Geo-structural data analysis and comparisonOrientation data calculated from LIDAR and those measuredthrough compass have been compared to validate the system. InFig. 8, an example of the comparison of the two stereonetsobtained plotting the data resulting from the traditional compassmethod and from LIDAR data is reported. The results refer to thedata collected along a traverse (37 data plane collected) and in aLIDAR survey windows placed in the same zone (251 data planecollected). The results appear in good correspondence with thepreliminary in situ observations apart from the sub-horizontalplane that cannot be detected by laser scanner since allacquisition have been done at the same high.
Data have been analyzed after subdividing the slope intohomogeneous domains, and discontinuity data have been statisti-cally analyzed to define the joint sets and their averageorientation, spacing, and persistence (Table 1). The rock masshas shown a relatively homogeneous structure in that the mainjoint sets are present in all slopes although some of the slopeshave shown a local variation. In particular, in some slopes a jointset parallel to the rock face has been observed by the in situsurvey that cannot be identified from the LIDAR data.
Discontinuity spacing and persistence distributions havebeen computed and average values of spacing are utilized in therock slope stability evaluation. Concerning persistence, thecomputed values have been high for most joint sets (above90%) with very high dispersions and, consequently, severalvalues of persistence have been assumed, with a maximum valueof 95%.
Stability assessmentFractured rock masses are often geometrically complex and canbe regarded as an assemblage of many individual polyhedralblocks whose shape and volume are connected to number,orientation, and spacing of the discontinuity systems present inthe rock mass. When such a rock mass is subjected tomechanical disturbance, through for example the excavationof slopes, the rock blocks can displace, rotate, and detach fromthe rock mass.
To assess the slopes stability conditions, several analyseshave then been performed by applying the limit equilibriummethod (LEM). Several analyses were performed by consider-ing the statistical distribution of geometrical characteristics ofthe joint sets identified in each slope.
In order to identify shape, dimension, type of kinematismand factor of safety of the blocks that can detach from the rockmass, the commercial code Rock3D (geo&soft) has been utilized.The code allows to conduct slope stability analyses followingfour steps: cluster analysis to identify the joints sets bythehierarchic clustering procedure; kinematic analysis based onthe key block theory (Goodman and Shi 1985); geometricalreconstruction of the blocks by creating a map of the disconti-nuities on the rock face, based on the statistical distribution ofthe discontinuities measured on the slope; stability analysis byapplying the limit equilibrium method to compute the factor of
safety of each finite and removable block and, in case of unstableblocks, the stabilization forces.
Cluster analyses leads to the identification of the joints setsby hierarchic clustering procedures based on multivariate
Table 1 Joint sets orientation angles and average spacing value obtained bystatistical analysis of the data collected along each slope by traditional and LIDARsurveys
Slope Joint Dip Dip Dir SpacingSets [°] [°] [m]
1 (311 data) J1 80 309 0.5
J2 89 174 0.6
J3 72 75 0.8
J4 53 146 0.5
J5 48 83 0.7
2 (1,100 data) J1 87 42 0.7
J2 81 341 0.7
J3 51 160 0.45
J4 54 232 1.5
3 (338data) J1 33 285 1.2
J2 77 329 0.6
J3 71 248 0.5
J4 84 63 0.6
4 (376 data) J1 69 10 0.6
J2 82 239 1
J3 35 212 0.65
J4 62 136 0.7
5 (419 data) J1 79 9 0.4
J2 77 239 1.2
J3 83 132 0.8
J4 48 191 0.6
J5 26 207 1.0
6 (400 data) J1 70 264 0.5
J2 80 12 0.7
J3 49 168 1
J4 79 134 0.7
J5 76 302 1
7 (467 data) J1 82 212 0.3
J2 50 187 0.6
J3 41 288 0.7
J4 45 40 0.5
8 (515 data) J1 77 63 0.4
J2 75 215 0.43
J3 44 215 0.5
J4 70 268 0.64
J5 78 11 0.5
Original Paper
Landslides 8 & (2011)226

analysis applied to the bi-dimensional spherical space instead ofthe n-dimensional Cartesian space (Dillon and Goldstein 1984).This procedure leads to the determination of an optimal numberof joint sets and their average orientations. The stability analysisare carried out by identifying the possible kinematic mechanism(vertical fall, planar, and wedge sliding) with the key blockmethod, evaluating the rock block volume and determining itssafety factor (SF) on the base of the shear strength of thediscontinuities and by applying the LEM.
Joint shear resistance has been determined on the basis ofdiscontinuity roughness and compressive strength collected by insitu measurements. In particular, since all discontinuities constantlyshowed low roughness values and a high weathering degree aprecautionary friction value equal to 32° have been adopted for allstability analysis.
This code allows, note the rock face dimension and orientation,to determine a map of the discontinuity traces in two different ways:by introducing the orientation and position of each discontinuity onthe rock face (deterministic way) or by an automatically traces
generation based on statistical distribution of geometrical disconti-nuity characteristics (orientation, spacing, and length) measured onthe slope (random way). In this way, the survey results can beexpanded and applied to larger slope portions. Statistical analyses ofspacing and persistence are carried independently for each joint setidentified by the cluster analysis. For each kinematic analysis, theblock shape and size is defined by the joint intersection, spacing, andpersistence; so they can be characterized by simple or complex shapeand the volume of each detachable block (defined as free andremovable in the key block method) can be easily determined bysimple analytical geometric equations. The dip, dip direction, andspacing variation for each joint set was quantified and applied in theblock stability evaluation by considering a random combination ofthis variability. Several analyses for each block type were performeduntil the maximum volume for each kinematics type was deter-mined.
Stereographic projection analyses have been performed for eachslope both considering average slope dip and berm dip. Theseanalyses allow to identify toppling of free and removable blocks and
Kinematism
Joint / Intersectio
n
Block ID
Max Block
Volume [m3]
Safety Factor
SF
Wedge sliding
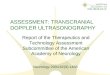
Planar sliding J3 10001 5.200 0.937 J3-J4 10011 0.008 0.900 J2-J4 10101 0.134 0.510
1011
10001100 1001
1110
0111
0110
0011
0101
0100 0001
0000
3
1010
2
4
1
slope
Fig. 9 Joint pyramids obtained for slope W4 and relative types of kinematics,maximum volume of the free and removable blocks and corresponding safetyfactor. In the lower side of the figure, a statistical reconstruction trace map and
free and removable blocks identified for three-dimensional sliding along theintersection J3–J4 (red and blue lines in Fig. 4) are reported
Table 2 Geometrical characteristics of the analyzed slopes and results obtained in terms of number of possible kinematisms, number, and volume of detachable (freeand removable) blocks
Slope Height Length Dip Number ofKinematism
Free andRemovable Blocks
Max Block Volume Average Block Volume
[m] [m] [°] # # [m3] [m3]
W1 40 180 60 4 23 1,118 0,291
W2 135 750 75 6 59 23,0 1,830
W3 30 100 75 3 15 0,556 0,107
W4 30 90 75 3 9 5,217 0,614
W5 40 50 80 6 31 5,430 0,896
W6 50 130 82 3 28 3,411 0,336
W7 50 250 85 3 38 4,342 0,588
W8 50 50 80 4 22 0,983 0,134
Landslides 8 & (2011) 227

to define their SF on the base of the block geometrical conditions(ratio between block height and width) and the base plane dip.
This method has been applied to each analyzed slope, consid-ering all the acquired discontinuity data obtained from traditionaland laser scanner surveys. The results of the key block analysis are: amap of the discontinuities crossing the rock faces, the type ofkinematics, and the geometrical features of free and removable blocks.For each free and removable block, the SF was computed by the limitequilibrium method. Results are reported in Fig. 9 for slope W8.
In Table 2, the results obtained for all the eight slopes analyzedare summarized.
A parametrical analysis has been performed in order to evaluatethe influence of the slope orientation on the slope stability.
The slopes considered with average inclination were analyzedwith special care since it gives an important indication on the wholeslope stability conditions. In particular, a decreasing dip candetermine a decreasing number of possible kinematism types sinceit determines a decreasing of the “space pyramid”.
Average and standard deviation dip for each slope have beencomputed analytically by the developed code as the plane thatinterpolates the whole cloud points. Computed dip range has beenutilized for performing parametric analysis.
Some of the slopes did not show any major variation (slope W1,W2 zones 1 and 3, W3, W6, andW7) in the stability condition becausethe decreasing dip did not determine any variation in the blockpyramid in terms of finite and removable blocks.
Some slopes (W2 zone 2, W4, W5, and W8) show variationsindicated in Table 2.
In practice, some of kinematism are not present any more withthese slope inclination decrease. As smaller number of blocks reducesthe number of unstable blocks and, consequently, the unstable volumeper unit slope area. However, the maximum volume block did notchange with slope inclination since in all cases the kinematism thatdetermined that maximum volume is constantly the same.
In certain cases, if the slope inclination increases of few degrees(and this can happen locally for large size slopes) the kinematism canbe formed by the discontinuity intersection. For this reason, aparametrical analysis has been performed in order to evaluate whena dip variation can determine major slope stability variations too (dipmax in Table 3).
This is the case of slope W2 zone 2 where an increase of 8° (upto 67°) can determine the formation of blocks of large dimensions(up to 20 m3). For slopes W5 and W8 the slope dip variations (downto 40° and 48°, respectively) determine an increase in the slopestability conditions.
In Fig. 10, some pictures reporting the in situ sliding phenomenonare shown, these observations confirm the results obtained with keyblock methods and have been carried on for each analyzed slope.
Stability analyses based on the complete geometrical model of theslopes based on the above described survey have been done byapplying the code Resoblock (Héliot 1988a, 1988b). The analyses followthe tectonic history of the formation as a continuous medium is
Table 3 Parametric analysis results by varying the slope dip between dip value obtained by laser scanner results DTM, up to the minimum dip determining unstableblocks
Slope Laser scanner Parametric analysis NotesDip Dip direction Dip “max” Observed variation in the stability conditions with slope dip
W1 57 164 No changes
W2 59 161 67 Zone 1–3 (DD 155°). No changes
Zone 2 (DD 170°).
With dip equal 59° kinematism 1,110 (3D sliding along J1–J4) isnot more present. This kinematism is present from a slopeminimum dip equal 67°
W3 65 255 No changes
W4 54 196 65 Kinematism 1,010 (sliding along J2–J4) and 1,001 (sliding along J3–J4)are not more present with dip equal 54°
This kinematism is present from a slope minimum dip equal 65°.Kinematism with max volume (>5 m3) is always present
W5 40 190 62–51 Zone 1 (DD 220°). With dip equal 40°Kinematism 10,101 (sliding along J3–J4),10,001 (sliding along J4) and 10,011 (sliding along J2–J3). Kinematism withmax volumes (10,101: > 3.5 m3 e 10,001>2 m3) are present from aminimum slope dip equal 62°
Zone 2 (DD 180°) With dip equal 40° kinematism 11,001 (sliding along J2–J4),10,001 (sliding along J4) and 10,011 (sliding along J2–J3). Among thesekinematism with max vol. (10,001>7 m3) is present from minimumslope dip equal 51°
W6 71 178 No changes
W7 64 198 No changes
W8 49 207 52–71 Kinematism 10,001 (planar sliding along J3) e 00,111 (sliding along J1–J2)are not more present with slope dip equal 49°. Minimum dip equal forone sliding 52° and 71° for both
Original Paper
Landslides 8 & (2011)228

transformed into a block system. The joint sets have been introducedin the code in such a way that only the first one can determine planarand continuous discontinuity while the following joint set have to stopagainst existing planes. Discontinuities can be introduced in adeterministic way, as in the case of faults or singular discontinuitiesdirectly detected on site; the joint sets are automatically generated in astatistical way on the basis of surveyed discontinuities, by means ofstatistical distributions.
Figure 11 shows the Resoblock model (1,265 blocks reproducing arock mass volume of 100×40×40 m3 (X, Y, Z)) set up on this basis for
one slope and the sliding phenomena computed by the block stabilityanalysis code based on the limit equilibrium method. These analyseshave determined the same kind of kinematics obtained with theRock3D code in all examined cases.
Hazard assessment methodology and resultsIn order to plan and define the eventual remedial works needed toreduce the rockfall risk level, a hazard level assessment procedurebased on the use of intensity–frequency matrix diagram (OFAT,OFEE, OFEFP 1997; Interreg 2001; Costa et al. 2006; Corominas et
c) W4. intersection J2 – J4.
b) W2. along set J3(160˚/51).
d) W2. intersection system J3 – J4.
3D sliding
a) W4. along set J3 (212/35)
Planar sliding
Fig. 10 Some pictures reporting the in situ planar (a and b) and 3D (c and d) sliding phenomena
Fig. 11 Resoblock rock slope reconstruction of slope W2 and sliding blocks computed by BSA code
Landslides 8 & (2011) 229

al. 2003, Jaboyedoff et al. 2005) has been applied. For this purpose,the hazard is calculated in term of probability of occurrence of adangerous phenomenon in a given location and time period(Varnes and IAEG Commission on Landslides 1984). Consequently,hazard level derives from a cross analysis between probability ofrock failure and danger, as reported in the diagram of Fig. 12.
The eight slopes have been preliminary analyzed focusing on thecharacterization of danger (intensity or magnitude of a localizedexisting or potential phenomenon of slope instability, with specificgeometric and mechanical characteristics). The danger has been cor-related to the number and the volume of the unstable blocks. The rockblock volume has been evaluated by considering the discontinuityorientations, persistence and spacing of each characteristic joint set.
The probability of rock failure is calculated for a portion of rockmass, with a specific volume within the considered slope. For thisstudy, this item has been correlated to the SF coming from the analysisdeveloped on the slopes for the theoretical unstable blocks and to thetype and number of possible instability phenomena, as focused on thebasis of the kinematic analysis.
HAZARD LEVEL and RATING
Low to medium 0 ÷ 1
Medium to High
High to Very High
1 ÷ 5
> 5
DANGER
High to very high
Medium to high
Low to medium
High to very high
Medium to high
Low to medium
PROBABILITY OF ROCK FAILURE
Fig. 12 Danger–probability of rock failure diagram to obtain the hazard level(from OFAT, OFEE, OFEFP 1997 modified)
Table 4 Partial and total hazard rating obtained for each slope
Slope Domain Berm stability Global stability [m3/m2] Water Existing protection Total rating
W1 0.7 1 1 −1 1.7
W2 a 0.1 1.3 1 −1 1.4
b 3.5 10 1 −1 13.5
c 0.4 0 1 0 1.4
W3 0.3 0 0 0 0.3
W4 0.1 1 0 0 1.1
W5 a 0.9 2 2 0 4.9
b 0.4 2 2 0 4.4
W6 4.4 1 2 0 7.4
W7 0.1 0.3 2 0 2.4
W8 0.1 0.2 0 0 0.3
The gray hues are the same of the hazard levels reported in Fig. 12
Table 5 Typological proposed remedial works for the different slopes
Remedial work SLOPES3 8 4 2a 2c 1 7 5b 5a 6 2b
Monitoring X X X X X X X X
Real time monitoring X X X X
Scaling X X X X X X X X X X X
Bolting X X X X X X X X X
Mesh X X X X X X
Fences X X X
Re-profiling X X X X
Canopy X
Original Paper
Landslides 8 & (2011)230

The risk is defined as the product between the slope hazard andthe vulnerability. Since the slopes are all directly hanging on themotorway, they all show the same degree of vulnerability (100%) and,consequently, the risk zonation corresponds to the hazard zonation.
In order to assess the exposition to the risk associated with rockfall and to prioritize interventions, a classification scheme wasdeveloped, to identify, the most dangerous slopes among the eightslopes studied and those of them requiring more urgent remedialworks. Since all slopes are hanging on the motorway, the level ofvulnerability is constantly high for all slopes and consequently thelevel of hazard can be directly compared. The very small spacebetween the slope and the road corridor do not leave any otherpossibility.
To define the level of danger, and then the hazard level, thefollowing items and ratings have been taken in account:
– Geometrical characteristics of the berm (height, gradient,length of the road below the slopes), considered as part ofglobal stability and stability of single berm;
– Global stability of the slope expressed in terms of unstabletheoretical volumes per slope square meter (unit volume),varying from 0 to 10 m3/m2;
– Stability of the single berm expressed as unstable theoreticalvolumes per square meter of slope, on slope height (variesfrom 0 to 4.4);
– Presence of water: dry (0), damp (1), or seepage (2) aredistinguished;
– Presence of existing protection measures, ranging from 0(absence or presence of non consistent protections) to −1(existing protections).
According to the above mentioned index, a final rating wasassigned to each slope (or geo-structural homogeneous sub-domain), as reported in Table 4. Taking in account the total rate,three levels of hazard were distinguished (Fig. 12) and applied forthe various slopes and domains.
The above defined hazard levels allowed for setting up a “Mapof Rock Fall Hazard”. The maps were set up by subdividing eachslope in regular mesh of 30×30 m; for each mesh cell, n hazard levelwas assigned on the bases of the above reported parameters.
According to this, some preliminary typological remedial workshave been proposed, for different levels of hazard, as shown in Table 5.
ConclusionThe paper aims to demonstrate the importance of advancedtechniques in the slope geo-structural and geometrical survey toimprove the quality of the stability analysis.
The study of the stability conditions of eight rock slopeshanging on a motorway in Far East have been carried on bymeans of the key block method based on accurate rock masssurveys. The surveys have been performed by both classicaltechniques and laser scanning acquisition; the last one hasallowed to determine the DSM and the slope point clouds thathave then been treated by a specific software developed by theUniversity of Parma for the determination of the rock discontinuitiesvisible on the rock faces bymeans of the application of a segmentationalgorithm. Discontinuity dip, dip direction, and position have alsobeen computed. Statistical data analysis at different scales supportedby in situ observation allowed the determination of the rock mass
structures in terms of joint set orientation and spacingConsequently, finite and removable rock blocks have been
determined in terms of kinematics mode andmaximum and averageunstable volumes. The acquired data will then be utilized for thedesign of stabilization works and for the slope risk assessment.
On the basis of stability computations and in situ observations,a stability index has been defined for both the global slope andsingular berm. Using this index coupled with geometrical character-istics of the slopes, derived from DSM file, a rating system has beenadopted for the hazard zonation. This procedure has also allowed toset up a quantitative way to compare the hazard among the slopesthus suggesting typological remedial and hazard mitigation works,for the various kinematisms.
References
Corominas J, Copons R, Vilaplana JM, Altimir J, Amigò J (2003) Form landslide hazardassessment to management, the Andorran experience. Int Conf on Fast SlopeMovements, Prediction and Prevention for Risk Mitigation, AGI, pp. 111–118
Costa G, Carrara A, Agliardi F, Campedel P, Frattini P (2006) Valutazione dellapericolosità da caduta massi tramite un approccio integrato statistico edeterministico. G Geol Appl 4:41–48
Dillon WR, Goldstein M (1984) Multivariate analysis methods and applications. Wiley,New York, 587pp
Felus YA (2006) On linear transformations of spatial data using the structured total leastnorm principle. Cartogr Geogr Inf Sci 33:195–205
Ferrero AM, Forlani G, Grasso PG, Migliazza M, Rabbi E, Roncella R (2007) Analysis ofstability condition of rock slope lying a far East motorway based on laser scannersurveys. 11th ISRM Congress, Lisbon
Ferrero AM, Forlani G, Roncella R, Voyat HI (2008) Advanced geo structural surveymethods applied to rock mass characterization. Rock Mec Rock Eng 4(2):631–665
Fischler M, Bolles R (1981) Random sample consensus: a paradigm for model fittingwith application to image analysis and automated cartography. In Commun AssocComp Mach 24(3):81–95
Goodman RE, Shi GH (1985) Block theory and its application to rock engineering.Prentice Hall, London, 338pp
Héliot D (1988a) Conception et Réalisation d’un Outil Intégré de Modélisation des massifsRocheux Fracturés en Blocs. Thèse, Institut National Polytechnique de Lorraine
Héliot D (1988b) Generating a blocky rock mass. Int J Rock Mech Sci Geomech Abstr 25(3):127–138
Interreg IIc (2001) Prévention des mouvements de versants et des instabilités defalaises: confrontation des méthodes d’étude d’éboulements rocheux dans l’arcAlpin, Interreg Communauté européenne
ISRM (1978) Suggested methods for the quantitative description of discontinuities inrock masses, Commission for Standardization of Laboratory and Field Test
Jaboyedoff M, Dudt JP, Labiouse V (2005) An attempt to refine rockfall hazard zoningbased on the kinetic energy, frequency and fragmentation degree. Nat Hazards EarthSyst Sci 5:621–632
OFAT, OFEE, OFEFP (1997) Recommendations. Prise en compte des dangers dus auxmouvements de terrain dans le cadre des activités de l’aménagement du territoire.Edited by OFAT/OFEE/OFEPF, Bern. Available at: http://www.planat.ch/resources/planat_product_fr_1032.pdf
Rock3D. Key block theory based three-dimensional rock block analysis. Manual. Geo&SoftVarnes DJ, IAEG Commission on Landslides and Other Mass-Movements (1984)
Landslide hazard zonation: a review of principales and practice. UNESCO, Paris
A. M. Ferrero ()) : M. Migliazza : R. RoncellaDepartment of Civil Engineering, of the Environment, of the Territory and Architecture,University of Parma,Parma, Italye-mail: [email protected]
E. RabbiGeodata,Turin, Italy
Landslides 8 & (2011) 231

Reproduced with permission of the copyright owner. Further reproduction prohibited without permission.