Embed Size (px)
Citation preview

Recursive Bayesian Estimation of ECHO state Recurrent Neural Networks
Branimir Todorović
Faculty of Natural Sciences and Mathematics, University of Nišand
Institute NIRI Ltd.
1
12 October 2016Data Science 2016

12 October 2016Data Science 2016 2
OUTLINE
1. Recursive Bayesian Estimation1.1 State Space Model of a Dynamic Sistem1.2 Optimal Solution
2. Recurrent Neural Networks2.1 Recurrent Neural Networks of Old2.2 Reservoir Computing Neural Networks – ECHO state network2.3 Reservoir Computing Neural Networks – NARX RNN
3. State Space Models of Recurrent Neural Networks3.1 SSM of Fully Connected RNN3.2 SSM of Elman RNN3.3 SSM of NARX RNN3.4 SSM of ECHO RNN
4. Computationaly Tractable Approximate Recursive Bayesian Estimation4.1 Linear Minimum Mean Square Error Estimation4.2 Propagating Random Variable through nonlinear mapping
5. Examples

3
1. Recursive Bayesian Estimation1.1 State Space Model of a Dynamic System
Time evolution of the state – dynamic equation:
),,( 1 kkkkk duxfx
Observation of the state is obtained by observation equation:
),( kkkk vxhy
stateprocess noise
known input
observation
state
observation noise
State Space Model of a Dynamic System
Input variables : control and noise .
Output variables: variables of interest that can be either measured or calculated.
State variables: minimum set of variables, whose values completely summarize
the system’s status and which are not directly observable (measurable).
),,( kkk vdu ku ),( kk vd
12 October 2016Data Science 2016

4
12 October 2016Data Science 2016
What is known?
a) Sequences of inputs and observations: ),( :0:0 kk yu
b) Exact analytical forms of the dynamics and the observation
process: kk hf ,
c) Noise models )(),( kk vpdp
What should be estimated?
Estimate recursively probability density function (pdf) of the state :
given the input and
the observation sequence .
kx
?)( :0 kk yxp
,...}1,0,{:0 kuu kk
,...}1,0,{:0 kyy kk
1. Recursive Bayesian Estimation1.2 Optimal Solution

5
12 October 2016Data Science 2016
)()(
)()( 1:0
1:0:0
kkkk
kkkk yxp
yyp
xypyxp
Likelihood
Evidence
Prior
Posterior
Bayes theorem
)( 1:01 kk yxp
11:0111:0 )()()( kkkkkkk dxyxpxxpyxp
kkkkkkk dxyxpxypyyp )()()( 1:01:0
Propagate through the dynamic equation to obtain a prediction of the
state:
Propagate through the observation equation to obtain a prediction of
the observation:
)( 1:0 kk yxp
kkkkkkkk ddpduxfxxxp d)()),,(()( 11
kkkkkkk vvpvxhyxyp d)()),(()(
1. Recursive Bayesian Estimation1.2 Optimal Solution

12 October 2016Data Science 2016 6
OUTLINE
1. Recursive Bayesian Estimation1.1 State Space Model of a Dynamic Sistem1.2 Optimal Solution
2. Recurrent Neural Networks2.1 Recurrent Neural Networks of Old2.2 Reservoir Computing Neural Networks – ECHO state network2.3 Reservoir Computing Neural Networks – NARX RNN
3. State Space Models of Recurrent Neural Networks3.1 SSM of Fully Connected RNN3.2 SSM of Elman RNN3.3 SSM of NARX RNN3.4 SSM of ECHO RNN
4. Computationaly Tractable Approximate Recursive Bayesian Estimation4.1 Linear Minimum Mean Square Error Estimation4.2 Propagating Random Variable through nonlinear mapping
5. Examples

7
2. Recurrent Neural Networks2.1 Recurrent Neural Networks of Old
y y1,k n ,k
uk
H
H
H
H
O
O
O
O
z-1 z-1 z-1 z-1
x1, -1k
x1,k
x1, -1k
x1,k
xn , -1k
H
xn ,k
H
x
x
n , -1k
n ,k
O
O
O
12 October 2016Data Science 2016
Fully Connected RNN
x
xx
H
OO
H
H
H
H
H
x x1,k
1,k
2,k n ,k
n ,k
H
uk
z-1 z-1 z-1
x x x1,k-1 2,k-1 n ,k-1H
O
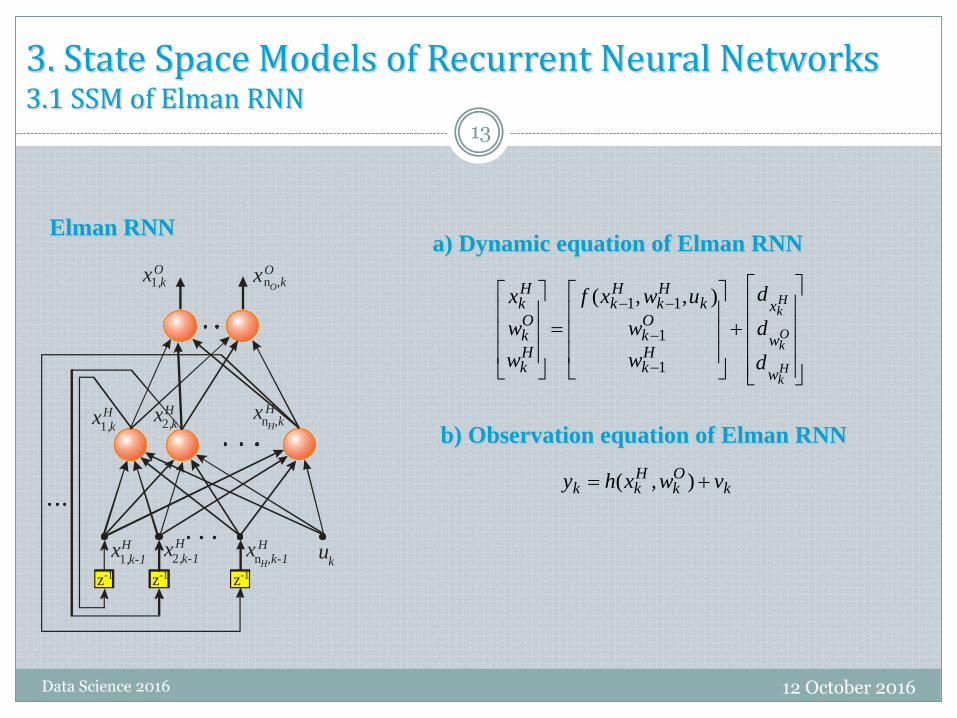
Elman RNN

8
2. Recurrent Neural Networks2.1 Recurrent Neural Networks of Old
12 October 2016Data Science 2016
Training Algorithms
Backpropagation through time (BPTT) Unfolds the temporal operation of the network into a layered
feedforward network at every time step. (Rumelhart, et al., 1986)
Real Time Recurrent Learning (RTRL) Two versions (Williams and Zipser, 1989)
1) update weights after processing sequences is completed.
2) on-line: update weights while sequences are being presented

9
2. Recurrent Neural Networks2.1 Recurrent Neural Networks of Old
12 October 2016Data Science 2016
Problems
BPTT and RTRL are first order training algorithms (the magnitude of the
weight change is proportional to the magnitude of the gradient).
Exploding and vanishing gradientsIf the weights are small, the magnitude of gradients(as we
backpropagate it through many steps in time) shrink exponentially.
If the weights are big, the magnitude of gradients (as we
backpropagate it through many steps in time) grow exponentially.

10
12 October 2016Data Science 2016
ECHO state RNN
1z 1z 1z
Rkx 1,
Rkx 2,
Rnk R
x ,
Rkx 1,1
Rkx 2,1
Rnk R
x ,1
Okx
ku
2. Recurrent Neural Networks2.2 Reservoir Computing RNN
xkO
O O
z-1 z-1z-1z-1
uu
xk-1
uk-1kx
k-u
xk-
Nonlinear AutoRegressive
Exogenous (NARX) RNNReservoirs of recurrent
neurons with sparse
connectivity and random
fixed weights

12 October 2016Data Science 2016 11
OUTLINE
1. Recursive Bayesian Estimation1.1 State Space Model of a Dynamic Sistem1.2 Optimal Solution
2. Recurrent Neural Networks2.1 Recurrent Neural Networks of Old2.2 Reservoir Computing Neural Networks – ECHO state network2.3 Reservoir Computing Neural Networks – NARX RNN
3. State Space Models of Recurrent Neural Networks3.1 SSM of Fully Connected RNN3.2 SSM of Elman RNN3.3 SSM of NARX RNN3.4 SSM of ECHO RNN
4. Computationaly Tractable Approximate Recursive Bayesian Estimation4.1 Linear Minimum Mean Square Error Estimation4.2 Propagating Random Variable through nonlinear mapping
5. Examples
12
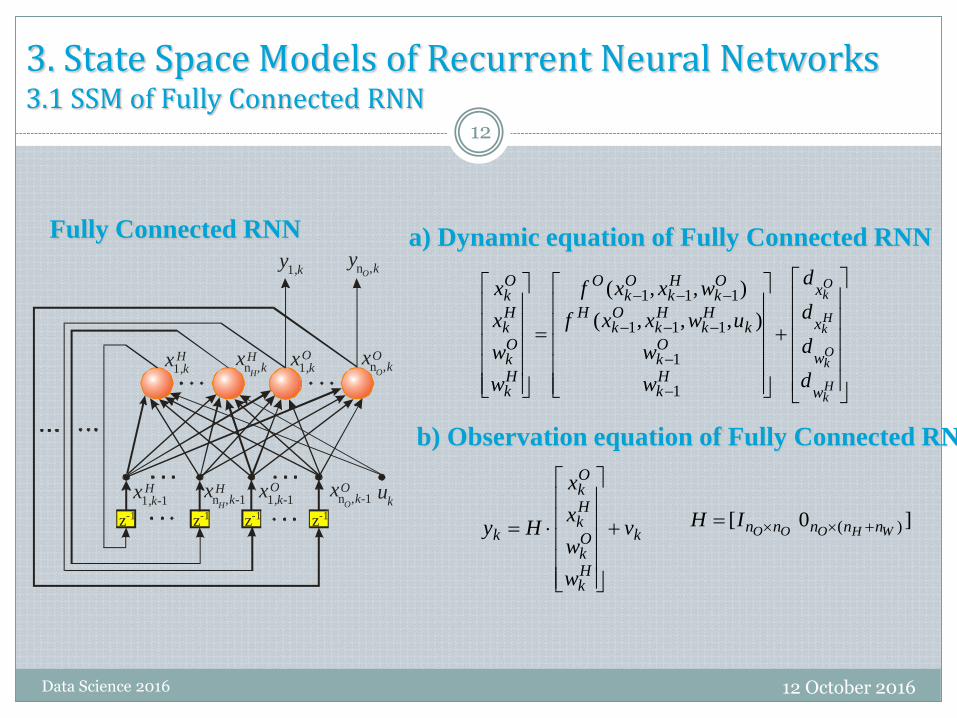
3. State Space Models of Recurrent Neural Networks3.1 SSM of Fully Connected RNN
y y1,k n ,k
uk
H
H
H
H
O
O
O
O
z-1 z-1 z-1 z-1
x1, -1k
x1,k
x1, -1k
x1,k
xn , -1k
H
xn ,k
H
x
x
n , -1k
n ,k
O
O
O
Hk
Ok
Hk
Ok
w
w
x
x
Hk
Ok
kHk
Hk
Ok
H
Ok
Hk
Ok
O
Hk
Ok
Hk
Ok
d
d
d
d
w
w
uwxxf
wxxf
w
w
x
x
1
1
111
111
),,,(
),,(
k
Hk
Ok
Hk
Ok
k v
w
w
x
x
Hy
]0[ )( WHOOO nnnnnIH
12 October 2016Data Science 2016
b) Observation equation of Fully Connected RNN
a) Dynamic equation of Fully Connected RNNFully Connected RNN
13
x
xx
H
OO
H
H
H
H
H
x x1,k
1,k
2,k n ,k
n ,k
H
uk
z-1 z-1 z-1
x x x1,k-1 2,k-1 n ,k-1H
O
Hk
Ok
Hk
w
w
x
Hk
Ok
kHk
Hk
Hk
Ok
Hk
d
d
d
w
w
uwxf
w
w
x
1
1
11 ),,(
kOk
Hkk vwxhy ),(
12 October 2016Data Science 2016
b) Observation equation of Elman RNN
a) Dynamic equation of Elman RNNElman RNN
3. State Space Models of Recurrent Neural Networks3.1 SSM of Elman RNN

14
3. State Space Models of Recurrent Neural Networks3.3 SSM of NARX RNN
xkO
O O
z-1 z-1z-1z-1
uu
xk-1
uk-1kx
k-u
xk-
Hk
Ok
Ok
x
ux
x
w
w
x
Hk
Ok
Ok
Ok
kkkOk
Ok
Hk
Ok
Ok
Ok
Ok
d
d
d
w
w
x
x
wuuxxf
w
w
x
x
x
0
0
),,..,,,..,(
1
1
1
1
111
1
1
k
Hk
Ok
Ok
Ok
Ok
k v
w
w
x
x
x
Hy
x
1
1
]0[ )( WHOOO nnnnnIH
12 October 2016Data Science 2016
b) Observation equation of NARX RNN
a) Dynamic equation of NARX RNN
Nonlinear AutoRegressive
Exogenous (NARX) RNN

15
Okw
Ok
Ok dww 1
kOk
T
Rk
kOkk vw
x
uxy
1
12 October 2016Data Science 2016
b) Observation equation of ECHO state RNN
a) Dynamic equation of ECHO state RNN
ECHO state RNN
1z 1z 1z
Rkx 1,
Rkx 2,
Rnk R
x ,
Rkx 1,1
Rkx 2,1
Rnk R
x ,1
Okx
ku
k
IRRk
RRk
Rk u
WxWaxax1
tanh)1( 11
Fixed random weights
(usually sparse connectivity)
3. State Space Models of Recurrent Neural Networks3.1 SSM of ECHO state RNN

16
3. State Space Models of Recurrent Neural Networks3.3 SSM of ECHO state RNN with Teacher Leading (ECHO TL)
Hk
Ok
Ok
x
ux
w
w
x
Hk
Ok
Ok
Ok
kkkOk
Ok
d
d
d
w
w
x
x
wuuxxf
0
0
),,..,,,..,(
1
1
1
1
111
k
Hk
Ok
Ok
Ok
Ok
k v
w
w
x
x
x
Hy
x
1
1
]0[ )( WHOOO nnnnnIH
12 October 2016Data Science 2016
b) Observation equation of ECHO TL RNN
a) Dynamic equation of ECHO TL RNN
ECHO TL RNN
1z 1z 1zRkx 1,
Rkx 2,
R
nk Rx,
Rkx 1,1
Rkx 2,1
R
nk Rx,1
Okx 1,
1z
Rkx 1,1
Rkx 2,1
R
nk Rx,1
Okx 1,1
ku
Fixed random weights
(usually sparse connectivity)

12 October 2016Data Science 2016 17
OUTLINE
1. Recursive Bayesian Estimation1.1 State Space Model of a Dynamic Sistem1.2 Optimal Solution
2. Recurrent Neural Networks2.1 Recurrent Neural Networks of Old2.2 Reservoir Computing Neural Networks – ECHO state network2.3 Reservoir Computing Neural Networks – NARX RNN
3. State Space Models of Recurrent Neural Networks3.1 SSM of Fully Connected RNN3.2 SSM of Elman RNN3.3 SSM of NARX RNN3.4 SSM of ECHO RNN
4. Computationaly Tractable Approximate Recursive Bayesian Estimation4.1 Linear Minimum Mean Square Error Estimation4.2 Propagating Random Variable through nonlinear mapping
5. Examples
18
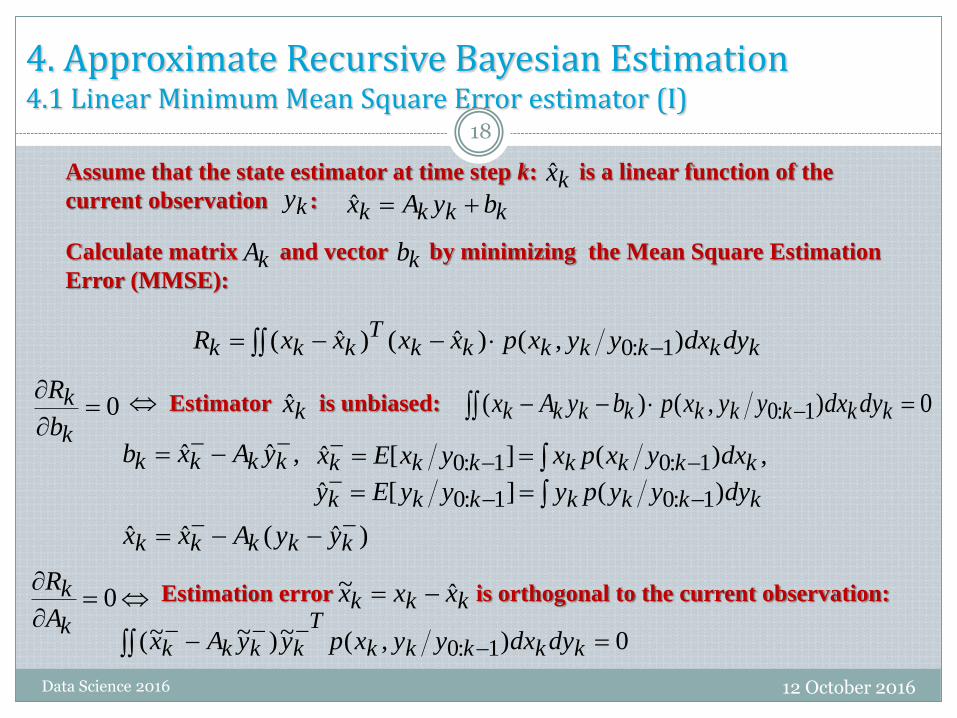
4. Approximate Recursive Bayesian Estimation4.1 Linear Minimum Mean Square Error estimator (I)
12 October 2016Data Science 2016
Assume that the state estimator at time step k: is a linear function of the
current observation :
Calculate matrix and vector by minimizing the Mean Square Estimation
Error (MMSE):
kkkk byAx ˆkx
ky
kA kb
kkkkkkkT
kkk dydxyyxpxxxxR ),()ˆ()ˆ( 1:0
0
k
k
b
R Estimator is unbiased:kx 0),()( 1:0 kkkkkkkkk dydxyyxpbyAx
0
k
k
A
R Estimation error is orthogonal to the current observation:
,ˆˆ kkkk yAxb ,)(][ˆ 1:01:0 kkkkkkk dxyxpxyxEx
kkkkkkk dyyypyyyEy )(][ˆ 1:01:0
0),(~)~~( 1:0 kkkkk
T
kkkk dydxyyxpyyAx
)ˆ(ˆˆ kkkkk yyAxx
kkk xxx ˆ~

19
4. Approximate Recursive Bayesian Estimation4.1 Linear Minimum Mean Square Error estimator (II)
1. PredictionGiven the state estimate and associated covariance at time step k-1:
),ˆ(11 kxk Px
a) Predict new state and associated covariance:
),,( 1 kkkkk duxfx
b) Predict the expected observation and associated covariance:
),( kkkk vxhy
c) Predict the cross-correlation matrix of state and observation:
kkkkkkkkk dddxdpyxpduxfx 11:011 )()(),,(ˆ
kkkkk
Tkkkkkkkkx
dvdxdpyxp
xduxfxduxfPk
11:01
11
)()(
)ˆ),,()(ˆ),,((
kkkkkkkk dvdxvpyxpvxhy )()(),(ˆ 1:0
kkkkk
Tkkkkkky dvdxvpyxpyvxhyvxhP
k)()()ˆ),()(ˆ),(( 1:0
12 October 2016NCTA 2014
kkkkkT
kkkkkyx dvdxvpyxpyvxhxxPkk
)()()ˆ),()(ˆ( 1:0
12 October 2016Data Science 2016

20
4. Approximate Recursive Bayesian Estimation4.1 Linear Minimum Mean Square Error estimator (III)
1. PredictionGiven the state estimate and associated covariance at time step k-1:
),ˆ(11 kxk Px
a) Predict new state and associated covariance:
),,( 1 kkkkk duxfx
b) Predict the expected observation and associated covariance:
),( kkkk vxhy
c) Predict the cross-correlation matrix of state and observation:
12 October 2016NCTA 2014
),ˆ(11 kxk Px
),ˆ(11 kyk Py
2. UpdateThe state estimate and associated covariance at time step k:
)ˆ()(ˆˆ 1 kkyyxkk yyPPxxkkk
kkkkkkk xyyyxxx PPPPP 1)(
kk yxP
12 October 2016Data Science 2016

4. Approximate Recursive Bayesian Estimation4.2 Propagating random variable through nonlinear mapping
12 October 2016Data Science 2016
21
a) Linear approximation of Taylor series expansion – Extended
Kalman Filter (EKF )[Anderson, B. and J. Moore
))(()()( xxxfxfxf
b) Stirling’s interpolation formula – Divided Difference Kalman
Filter (DDKF) [Nørgaard et al., 2000]
c) Unscented transform – Unscented Kalman Filter (UKF)[Julier and
Uhlmann, 1997]
2)(!2
)())(()()( xx
xfxxxfxfxf DD
DD
)(, 00 nx
ninPnx iixi ,...,2,1,)(5.0,))((
niknPnx niixni ,...,2,1,)(5.0,))((
h
hxfhxfxfDD
)()()(
2
)(2)()()(
h
xfhxfhxfxfDD
The n-dimensional random variable is approximated
by a set of 2n+1 deterministically selected points:
),(~ xPxx

c) Noise models (UNKNOWN):
b) Exact analytical forms of the dynamics and the observation
process (UNKNOWN):
4. Approximate Recursive Bayesian Estimation of the
Recurrent Neural Network state22
12 October 2016Data Science 2016
What is known?
a) Sequences of inputs and observations: ),( :0:0 kk yu
kk hf ,
)(),( kk vpdp
What should be estimated?
Estimate recursively probability density function (pdf) of the state :
given the input and
the observation sequence .
kx
?)( :0 kk yxp
Each sample is presented to the RNN and learning algorithm
only once.
,...}1,0,{:0 kuu kk
,...}1,0,{:0 kyy kk
),( kk yu

12 October 2016Data Science 2016 23
OUTLINE
1. Recursive Bayesian Estimation1.1 State Space Model of a Dynamic Sistem1.2 Optimal Solution
2. Recurrent Neural Networks2.1 Recurrent Neural Networks of Old2.2 Reservoir Computing Neural Networks – ECHO state network2.3 Reservoir Computing Neural Networks – NARX RNN
3. State Space Models of Recurrent Neural Networks3.1 SSM of Fully Connected RNN3.2 SSM of Elman RNN3.3 SSM of NARX RNN3.4 SSM of ECHO RNN
4. Computationaly Tractable Approximate Recursive Bayesian Estimation4.1 Linear Minimum Mean Square Error Estimation4.2 Propagating Random Variable through nonlinear mapping
5. Examples

5. Examples
12 October 2016Data Science 2016
24
After sequential training on certain number of samples, recurrent neural
networks were iterated for a number of samples, by feeding back just the
predicted outputs as the new inputs of the recurrent neurons.
Time series of N iterated predictions were compared with the test parts of the
original time series by calculating the Normalized Root Mean Squared Error
(NRMSE):
σ is the standard deviation of chaotic time series;
N
kkk
NyyNRMSE
1
21 )ˆ(2
yk is the true value of sample at time step k, and is the RNN prediction.ky

5.1 Example: Hénon chaotic time series prediction
12 October 2016Data Science 2016
25
22
1 3.04.11 kkk xxx
Hénon difference equation
a) Hénon attractor b) Hénon time series

0 500 1000 1500 2000 2500 3000-2
-1.5
-1
-0.5
0
0.5
1
1.5
Time step: k
e(k
)
3000 3002 3004 3006 3008 3010 3012 3014 3016 3018 3020-1.5
-1
-0.5
0
0.5
1
1.5
Time step: k
Chaotic time series
Prediction
Error
0 500 1000 1500 2000 2500 3000-15
-10
-5
0
5
10
15Parameter adaptation
Time step: k
-1.5 -1 -0.5 0 0.5 1 1.5-1.5
-1
-0.5
0
0.5
1
1.5
x(k-1)
x(k
)
Hénon attractor
RNN attractor
5.1 Example: Hénon chaotic time series prediction
(ELMAN, DDF, nH=4 SIG, nBS=4, nw=25)
12 October 2016Data Science 2016
26
c) Synaptic weights evolution d) Prediction error during training
a) Attractors b) Long term (iterated) prediction

a) Attractors b) Long term (iterated) prediction
0 500 1000 1500 2000 2500 3000-2
-1.5
-1
-0.5
0
0.5
1
1.5
Time step: k
e(k
)
3000 3002 3004 3006 3008 3010 3012 3014 3016 3018 3020-1.5
-1
-0.5
0
0.5
1
1.5
Time step: k
Chaotic time series
Prediction
Error
0 500 1000 1500 2000 2500 3000-15
-10
-5
0
5
10
15Parameter adaptation
Time step: k
-1.5 -1 -0.5 0 0.5 1 1.5-1.5
-1
-0.5
0
0.5
1
1.5
x(k-1)
x(k
)
Hénon attractor
RNN attractor
5.1 Example: Hénon chaotic time series prediction
(ELMAN, DDF, nH=4 SIG, nBS=4, nw=25)
12 October 2016Data Science 2016
27
c) Synaptic weights evolution d) Prediction error during training
x
xx
H
OO
H
H
H
H
H
x x1,k
1,k
2,k n ,k
n ,k
H
uk
z-1 z-1 z-1
x x x1,k-1 2,k-1 n ,k-1H
O

-1.5 -1 -0.5 0 0.5 1 1.5-1.5
-1
-0.5
0
0.5
1
1.5
x(k-1)
x(k
)
Hénon attractor
RNN attractor
3000 3002 3004 3006 3008 3010 3012 3014 3016 3018 3020-2
-1.5
-1
-0.5
0
0.5
1
1.5
Time step: k
Chaotic time series
Prediction
Error
0 500 1000 1500 2000 2500 3000-2
-1.5
-1
-0.5
0
0.5
1
1.5
Time step: k
e(k
)
0 500 1000 1500 2000 2500 3000-10
-5
0
5
10
15Parameter adaptation
Time step: k
5.1 Example: Hénon chaotic time series prediction
(ELMAN, DDF, nH=3 RBF, nBS=3, nw=22)
12 October 2016Data Science 2016
28
a) Attractors b) Long term (iterated) prediction
c) Synaptic weights evolution d) Prediction error during training

-1.5 -1 -0.5 0 0.5 1 1.5-1.5
-1
-0.5
0
0.5
1
1.5
x(k-1)
x(k
)
Hénon attractor
RNN attractor
3000 3002 3004 3006 3008 3010 3012 3014 3016 3018 3020-2
-1.5
-1
-0.5
0
0.5
1
1.5
Time step: k
Chaotic time series
Prediction
Error
0 500 1000 1500 2000 2500 3000-2
-1.5
-1
-0.5
0
0.5
1
1.5
Time step: k
e(k
)
0 500 1000 1500 2000 2500 3000-10
-5
0
5
10
15Parameter adaptation
Time step: k
12 October 2016Data Science 2016
29
a) Attractors b) Long term (iterated) prediction
c) Synaptic weights evolution d) Prediction error during training
x
xx
H
OO
H
H
H
H
H
x x1,k
1,k
2,k n ,k
n ,k
H
uk
z-1 z-1 z-1
x x x1,k-1 2,k-1 n ,k-1H
O
5.1 Example: Hénon chaotic time series prediction
(ELMAN, DDF, nH=3 RBF, nBS=3, nw=22)
3000 3002 3004 3006 3008 3010 3012 3014 3016 3018 3020-1.5
-1
-0.5
0
0.5
1
1.5
Time step: k
Chaotic time series
Prediction
Error
0 500 1000 1500 2000 2500 3000-6
-4
-2
0
2
4Parameter adaptation
Time step: k0 500 1000 1500 2000 2500 3000
-2
-1.5
-1
-0.5
0
0.5
1
1.5
Time step: k
e(k
)
-1.5 -1 -0.5 0 0.5 1 1.5-1.5
-1
-0.5
0
0.5
1
1.5
x(k-1)
x(k
)
Hénon attractor
RNN attractor
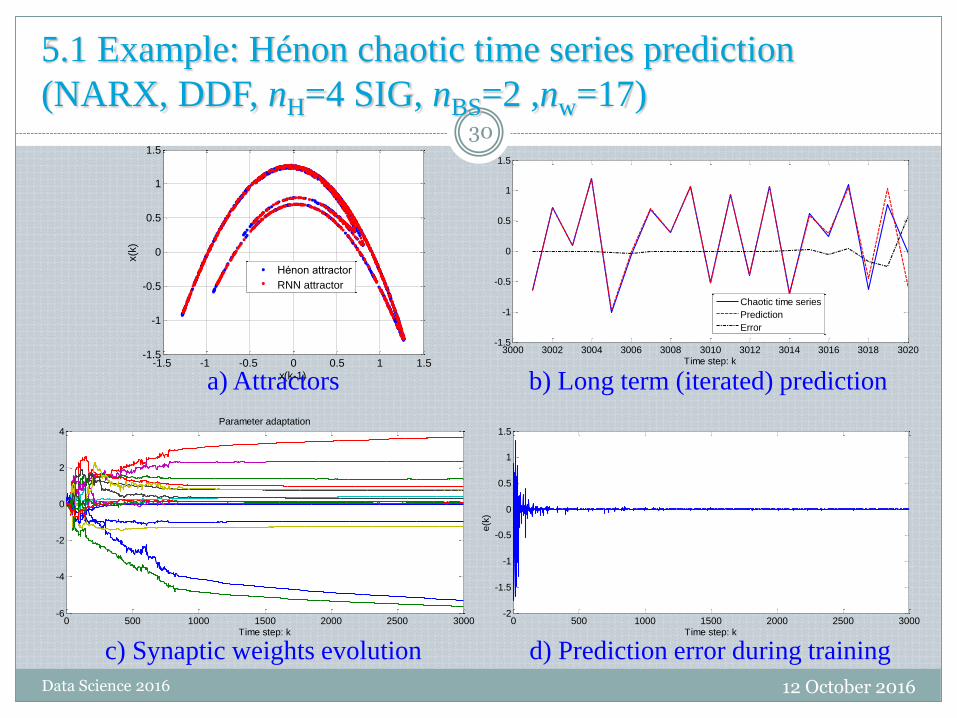
5.1 Example: Hénon chaotic time series prediction
(NARX, DDF, nH=4 SIG, nBS=2 ,nw=17)
12 October 2016Data Science 2016
30
a) Attractors b) Long term (iterated) prediction
c) Synaptic weights evolution d) Prediction error during training

3000 3002 3004 3006 3008 3010 3012 3014 3016 3018 3020-1.5
-1
-0.5
0
0.5
1
1.5
Time step: k
Chaotic time series
Prediction
Error
0 500 1000 1500 2000 2500 3000-6
-4
-2
0
2
4Parameter adaptation
Time step: k0 500 1000 1500 2000 2500 3000
-2
-1.5
-1
-0.5
0
0.5
1
1.5
Time step: k
e(k
)
-1.5 -1 -0.5 0 0.5 1 1.5-1.5
-1
-0.5
0
0.5
1
1.5
x(k-1)
x(k
)
Hénon attractor
RNN attractor
5.1 Example: Hénon chaotic time series prediction
(NARX, DDF, nH=4 SIG, nBS=2 ,nw=17)
12 October 2016Data Science 2016
31
a) Attractors b) Long term (iterated) prediction
c) Synaptic weights evolution d) Prediction error during training
xkO
O O
z-1 z-1z-1z-1
uu
xk-1
uk-1kx
k-u
xk-

0 500 1000 1500 2000 2500 3000-2
-1.5
-1
-0.5
0
0.5
1
1.5
Time step: k
e(k
)
-1.5 -1 -0.5 0 0.5 1 1.5-1.5
-1
-0.5
0
0.5
1
1.5
x(k-1)
x(k
)
Hénon attractor
RNN attractor
3000 3002 3004 3006 3008 3010 3012 3014 3016 3018 3020-1.5
-1
-0.5
0
0.5
1
1.5
Time step: k
Chaotic time series
Prediction
Error
0 500 1000 1500 2000 2500 3000-30
-20
-10
0
10
20
30Parameter adaptation
Time step: k
5.1 Example: Hénon chaotic time series prediction
(NARX, DDF, nH=3 RBF, nBS=2, nw=16)
12 October 2016Data Science 2016
32
a) Attractors b) Long term (iterated) prediction
c) Synaptic weights evolution d) Prediction error during training

0 500 1000 1500 2000 2500 3000-2
-1.5
-1
-0.5
0
0.5
1
1.5
Time step: k
e(k
)
-1.5 -1 -0.5 0 0.5 1 1.5-1.5
-1
-0.5
0
0.5
1
1.5
x(k-1)
x(k
)
Hénon attractor
RNN attractor
3000 3002 3004 3006 3008 3010 3012 3014 3016 3018 3020-1.5
-1
-0.5
0
0.5
1
1.5
Time step: k
Chaotic time series
Prediction
Error
0 500 1000 1500 2000 2500 3000-30
-20
-10
0
10
20
30Parameter adaptation
Time step: k
5.1 Example: Hénon chaotic time series prediction
(NARX, DDF, nH=3 RBF, nBS=2, nw=16)
12 October 2016Data Science 2016
33
a) Attractors b) Long term (iterated) prediction
c) Synaptic weights evolution d) Prediction error during training
xkO
O O
z-1 z-1z-1z-1
uu
xk-1
uk-1kx
k-u
xk-

34
5.1 Example: Hénon chaotic time series prediction
Hn
12 October 2016Data Science 2016
Mean Var T[s]
DDF_ELMAN_SIG 1.73e-2 6.19e-5 4 25 8.34
DDF_ELMAN_RBF 6.02e-2 3.89e-4 3 22 7.76
UKF_ELMAN_SIG 7.29e-2 9.46e-3 4 25 8.53
UKF_ELMAN_RBF 7.24e-2 1.79e-3 3 22 7.91
EKF_ELMAN_SIG 1.69e-1 5.17e-2 4 25 7.69
EKF_ELMAN_RBF 1.01e-1 7.50e-3 3 22 7.96
DDF_NARX_SIG 7.46e-3 3.39e-6 4 17 6.21
DDF_NARX_RBF 4.36e-3 4.15e-6 3 16 5.85
UKF_NARX_SIG 1.28e-2 2.68e-5 4 17 6.37
UKF_NARX_RBF 5.72e-3 7.14e-6 3 16 6.00
EKF_NARX_SIG 1.57e-2 1.65e-5 4 17 5.76
EKF_NARX_RBF 7.07e-3 1.35e-6 3 16 6.17
Wn

5.2 Example: Mackey-Glass( ) chaotic time series
long term prediction
12 October 2016Data Science 2016
35
Chaotic time series is obtained from the Mackey-Glass equation
10)(1
)()()(
tx
taxtbxtx
which exhibits chaotic behaviour for ,2.0a ,1.0b 17
Equation is integrated using fourth-order Runge-Kutta method with
an integration time step 0.01. The resulting time series is sampled at
1 Hz to obtain a sequence of 3000 training samples and 3000 test
samples for clean (1000 test samples for noisy time series).
17

5.2 Example: Mackey-Glass( ) chaotic time series long term
prediction: ECHO TL (500 RN-s, 2% conn.)
12 October 2016Data Science 2016
36
0 500 1000 1500 2000 2500 3000-0.6
-0.4
-0.2
0
0.2
0.4
Time steps: k
Iterated prediction of Mackey-Glass(tau = 17) time series
Original
Prediction
0 500 1000 1500 2000 2500 3000-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4Long term predicton error of Mackey-Glass(tau = 17) time series
Time steps: k
17

5.2 Example: Mackey-Glass( ) chaotic time series long term
prediction: ECHO TL (500 RN-s, 2% conn.)
12 October 2016Data Science 2016
37
0 500 1000 1500 2000 2500 3000-0.6
-0.4
-0.2
0
0.2
0.4
Time steps: k
Iterated prediction of Mackey-Glass(tau = 17) time series
Original
Prediction
0 500 1000 1500 2000 2500 3000-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4Long term predicton error of Mackey-Glass(tau = 17) time series
Time steps: k
17
1z 1z 1zRkx 1,
Rkx 2,
R
nk Rx,
Rkx 1,1
Rkx 2,1
R
nk Rx,1
Okx 1,
1z
Rkx 1,1
Rkx 2,1
R
nk Rx,1
Okx 1,1
ku
Fixed random weights
(usually sparse
connectivity)

5.2 Example: Mackey-Glass( ) chaotic time series long term
prediction: (NARX, SRKF, nH=8 SIG, nBS=5 ,nw=54)
12 October 2016Data Science 2016
38
17
500 1000 1500 2000 2500 3000-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8Long term predicton error of Mackey-Glass(tau = 17) time series
Time steps: k
0 500 1000 1500 2000 2500 30000.4
0.6
0.8
1
1.2
1.4
Time steps: k
Iterated prediction of Mackey-Glass(tau = 17) time series
Original
Prediction

5.2 Example: Mackey-Glass( ) chaotic time series long term
prediction: (NARX, SRKF, nH=8 SIG, nBS=5 ,nw=54)
12 October 2016Data Science 2016
39
17
500 1000 1500 2000 2500 3000-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8Long term predicton error of Mackey-Glass(tau = 17) time series
Time steps: k
0 500 1000 1500 2000 2500 30000.4
0.6
0.8
1
1.2
1.4
Time steps: k
Iterated prediction of Mackey-Glass(tau = 17) time series
Original
Prediction
xkO
O O
z-1 z-1z-1z-1
uu
xk-1
uk-1kx
k-u
xk-

5.3 Example: Noisy Mackey-Glass( ) chaotic time series long
term prediction: ECHO TL (500 RN-s, 2% conn.)
12 October 2016Data Science 2016
40
17
100 200 300 400 500 600 700 800 900 1000-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8Long term predicton error of Mackey-Glass(tau = 17) time series
Time steps: k
0 100 200 300 400 500 600 700 800 900 1000-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Time steps: k
Iterated prediction of Mackey-Glass(tau = 17) time series
Noisy
Original
Prediction

5.3 Example: Noisy Mackey-Glass( ) chaotic time series long
term prediction: ECHO TL (500 RN-s, 2% conn.)
12 October 2016Data Science 2016
41
17
100 200 300 400 500 600 700 800 900 1000-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8Long term predicton error of Mackey-Glass(tau = 17) time series
Time steps: k
0 100 200 300 400 500 600 700 800 900 1000-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Time steps: k
Iterated prediction of Mackey-Glass(tau = 17) time series
Noisy
Original
Prediction
1z 1z 1zRkx 1,
Rkx 2,
R
nk Rx,
Rkx 1,1
Rkx 2,1
R
nk Rx,1
Okx 1,
1z
Rkx 1,1
Rkx 2,1
R
nk Rx,1
Okx 1,1
ku
Fixed random weights
(usually sparse
connectivity)

5.2 Example: Mackey-Glass( ) chaotic time series long term
prediction: (NARX, SRKF, nH=8 SIG, nBS=5 ,nw=54)
12 October 2016Data Science 2016
42
17
0 100 200 300 400 500 600 700 800 900 10000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Time steps: k
Iterated prediction of noisy Mackey-Glass(tau = 17) time series (SNR = 1dB)
Noisy
Original
Prediction
100 200 300 400 500 600 700 800 900 1000-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4Long term predicton error of noisy Mackey-Glass(tau = 17) time series (SNR = 1dB)
Time steps: k

100 200 300 400 500 600 700 800 900 1000-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4Long term predicton error of noisy Mackey-Glass(tau = 17) time series (SNR = 1dB)
Time steps: k
5.2 Example: Mackey-Glass( ) chaotic time series long term
prediction: (NARX, SRKF, nH=8 SIG, nBS=5 ,nw=54)
12 October 2016Data Science 2016
43
17
0 100 200 300 400 500 600 700 800 900 10000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Time steps: k
Iterated prediction of noisy Mackey-Glass(tau = 17) time series (SNR = 1dB)
Noisy
Original
Prediction
xkO
O O
z-1 z-1z-1z-1
uu
xk-1
uk-1kx
k-u
xk-

44
6. Conclusions
12 October 2016Data Science 2016
HnWn
ECHO state recurrent neural network and NARX recurrent neural network
belong to the class of Reservoir Computing recurrent neural networks.
ECHO state RNN has reservoir of nonlinear recurrent neurons and linear
readout layer.
NARX RNN has reservoir of linear neurons and nonlinear readout layers.
Both networks have fast learning and superior generalization capabilities,
compared to the other RNN architectures.

Appendix: Approximate nonlinear non-Gaussian
estimation
12 October 2016Data Science 2016
45
PxxNwAyxpyAPyxp jxjkk
n
j,jkjkkk
n
jkjkkk k
kk
),ˆ;( ),(}{)( ,,111
1,11:011
1:0,11:01 1
11
QddNwdBdpBPdp ikikk
n
jk,iikk
n
jjkk
kdkd
),;( )(}{)( ,,1
,1
,
RvvNwvCvpCPvp ikikk
n
jk,iikk
n
jjkk
kvkv
),;( )(}{)( ,,1
,1
,
State pdf in k-1
Process noise pdf
Observation noise pdf
-25 -20 -15 -10 -5 0 5 10 15 20 250
0.05
0.1
0.15
0.2
0.25
Gaussian Sum filters – applying mixtures of Gaussians to approximate non-
Gaussian pdf’s.

Appendix: Approximate nonlinear non-Gaussian
estimation
12 October 2016Data Science 2016
46
PxxNwAyxpyAPyxp jxjkk
n
j,jkjkkk
n
jkjkkk k
kk
),ˆ;( ),(}{)( ,,111
1,11:011
1:0,11:01 1
11
QddNwdBdpBPdp ikikk
n
jk,iikk
n
jjkk
kdkd
),;( )(}{)( ,,1
,1
,
RvvNwvCvpCPvp ikikk
n
jk,iikk
n
jjkk
kvkv
),;( )(}{)( ,,1
,1
,
State pdf in k-1
Process noise pdf
Observation noise pdf
-25 -20 -15 -10 -5 0 5 10 15 20 250
0.05
0.1
0.15
0.2
0.25
-25 -20 -15 -10 -5 0 5 10 15 20 250
0.05
0.1
0.15
0.2
0.25
Gaussian Sum filters – applying mixtures of Gaussians to approximate non-
Gaussian pdf’s.
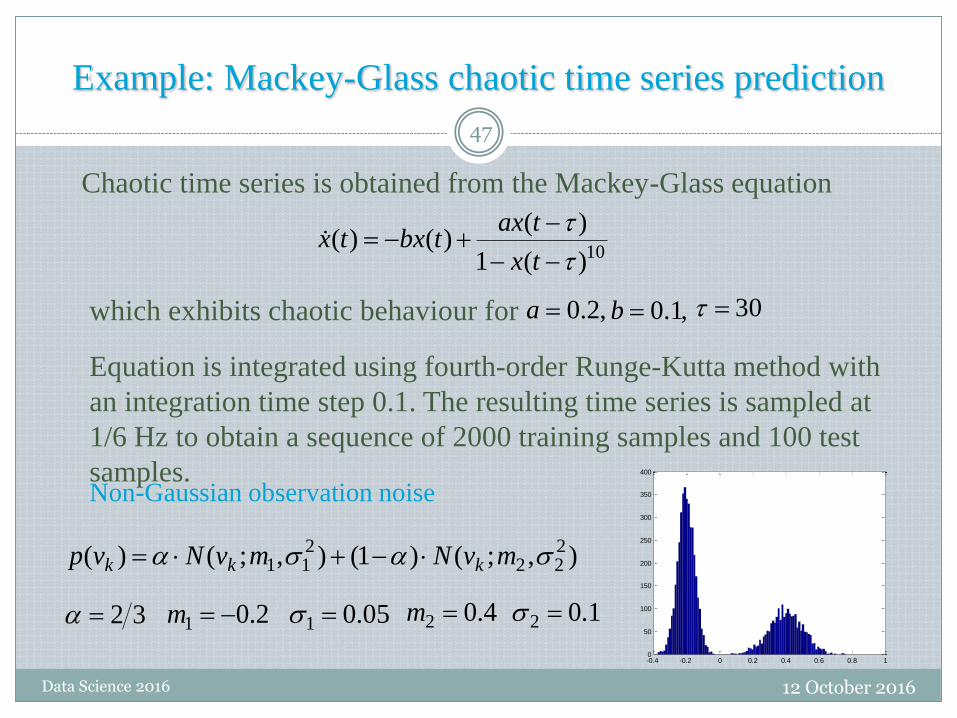
Example: Mackey-Glass chaotic time series prediction
12 October 2016Data Science 2016
47
Chaotic time series is obtained from the Mackey-Glass equation
10)(1
)()()(
tx
taxtbxtx
which exhibits chaotic behaviour for ,2.0a ,1.0b 30
Equation is integrated using fourth-order Runge-Kutta method with
an integration time step 0.1. The resulting time series is sampled at
1/6 Hz to obtain a sequence of 2000 training samples and 100 test
samples.
-0.4 -0.2 0 0.2 0.4 0.6 0.8 10
50
100
150
200
250
300
350
400
),;()1(),;()( 222
211 mvNmvNvp kkk
Non-Gaussian observation noise
32 2.01 m 05.01 4.02 m 1.02

12 October 2016Data Science 2016
48
00.5
11.5
0
0.5
1
1.50
0.5
1
1.5
x(k-1)
Mackey Glass atraktor
x(k-2)
x(k
)
00.5
11.5
2
0
1
20
0.5
1
1.5
2
x(k-1)
Noisy Mackey Glass atraktor
x(k-2)x(k
)
00.5
11.5
0
0.5
1
1.50
0.5
1
1.5
x(k-1)
Atraktor NARX RMLP mre e
x(k-2)
x(k
)
2010 2020 2030 2040 2050 2060 2070 2080 2090 2100-0.5
0
0.5
1
1.5
2
2.5NARX RMLP iterisana predikcija Mackey-Glass haoti~ne serije
Korak diskretizacije vremena: k
Haoti~na serija naru{ena {umomHaoti~na serijaPredikcijaGre{ka
0 200 400 600 800 1000 1200 1400 1600 1800 20000
0.2
0.4
0.6
0.8
1Verovatno}e komponenti sume Gausijana
Korak diskretizacije vremena: k
P(Ak,1
/y0:k
)
P(Ak,2
/y0:k
)
P(Ak,3
/y0:k
)
0 5 10 15 20 25 30 35 40 45 50-2
-1.5
-1
-0.5
0
0.5
1
1.5
2xk,1
=E[xk/y
0:k,A
k,1]
xk,2
=E[xk/y
0:k,A
k,2]
xk,3
=E[xk/y
0:k,A
k,3]
a) Mackey-Glass attractor b) Noisy attractor c) RNN reconstructed attractor
d) Long term prediction e) Component probabilities f) Final weights
Example: Mackey-Glass chaotic time series prediction - multimodal
noise case (GS_DDF, nH=5 SIG, nBS=6, nw=41, n=3 components)