Embed Size (px)
Citation preview

INTELLIGENT AUTONOMOUS SYSTEM FOR CARS
K. Hari Kishore.
08MP1A0229
Abstract—Focusing the safety and uninterrupted
traffic management, this paper presents the
planning for construction and implementation of
intelligent autonomous system in cars. The
method includes implementation of the concepts
like AICC (Autonomous Intelligent Cruise
Control system) which is used to control the
speed of the car automatically, Lane support
system which audibly warns the driver of
unintended lane departure. The lane markings
are detected by processing images from a video
camera. The collision avoidance system predicts
accurately the likelihood of an imminent
collision. If a collision is likely then the system
responds in such a way as to reduce the threat
and the response may involve the automatic
control of the vehicle or simply an appropriate
warning to the driver.
INTRODUCTION
Ideally an intelligent autonomous car would
have an automatic pilot, which can park itself and
guide the vehicle through dense traffic in towns
and at high speeds between towns. At any time the
driver would have the ability to switch between
automatic and driver control. During periods of
manual control the system would act in an
advisory capacity warning the driver of hazards
and giving information about route guidance or
traffic congestion.
Such a vehicle would retain the convenience
and fun of private transport but would take the
V.Chaitanya Prasad, (M-tech).
Assoc.Prof. EEE Dept.
drudgery out of driving during automatic
operation. Such ambitious goals are being
seriously considered by vehicle manufactures.
Fully autonomous systems will not appear for
some time although they may be introduced
sooner if the traffic environment is greatly
constrained. More viable for medium term are
semi autonomous systems where driver maintains
responsibility for the overall control of the car.
Thus they will provide platform for providing the
technology for later fully autonomous systems.
This paper focuses on some of the semi
autonomous systems that are currently being
investigated in Europe, US and Japan which
include:
Autonomous intelligent cruise control
systems.
Lane support systems.
Collision avoidance systems.
AUTONOMOUS INTELLIGENT CRUISE
CONTROL SYSTEM
Traditional cruise control systems have been
in use for many years. They maintain a constant
vehicle speed, set by the driver, thereby improving
comfort in steady traffic conditions. In congested
traffic conditions when speeds vary widely these
systems are no longer effective. The use of cruise
control would be significantly increased if the
vehicle speed could automatically adapt to the
traffic flow.

Figure 1: Architecture of Intelligent
Autonomous Cruise control system
The Autonomous Intelligent Cruise Control
(ACC) systems add $1500 to $3000 to the cost of
a car, use laser beams or radar to measure the
distance from the vehicle they are in to the car
ahead and its speed relative to theirs. If a car
crosses into the lane ahead, say, and the distance
is now less than the preset minimum (typically a
1- or 2-second interval of separation), the system
applies the brakes, slowing the car with a
maximum deceleration of 3.5 m/s2 until it is
following at the desired distance. If the leading car
speeds up or moves out of the lane, the system
opens the throttle until the trailing car has returned
to the cruise control speed set by the driver.
The addition of a radar sensor to the front of
a vehicle would provide the necessary range and
velocity information for this task. Automatic
control of brakes and throttle would allow the
longitudinal controller to maintain a constant time
interval behind the vehicle in front. Such systems
are commonly referred to as Autonomous
Intelligent Cruise Control Systems (AICC) and
aim to improve driver comfort and conveniences.
It is important to remember that these systems are
quite different from the fully autonomous car. The
driver is always responsible for driving and must
deal with emergency situations. The system is
only capable for fine longitudinal control and not
emergency braking. The system is further
enhanced by allowing operation down to zero
speed which would increase comfort during traffic
jams.
Fundamental to any AICC system is a
sensor that can reliably detect obstacles in the
traffic environment in a variety of conditions.
Microwave radar is a method for detecting the
position and velocity of a distant object. A beam
of electromagnetic radiation, with a wavelength
between 30cm and 1mm is transmitted and
reflected back to the transmitter by the object.
Velocity and Range can be derived by measuring
the Doppler frequency shift and time of flight of
the transmission. A major advantage of
microwave radar is that the performance is not
affected by the time of the day, and therefore no
driver adaptation is required for night- time
driving. The performance advantages of radar
over other sensors are enhanced during poor
weather conditions. Systems that rely on visible
light are known to suffer significantly in the very
conditions for which they are relied upon the
most. Experience of microwave radar operation
has shown that reliable results can be obtained,
even in inclement weather conditions.
The operation of microwave radar falls
broadly into two categories: Pulse and Frequency
Modulated Wave (FMCV). Pulse systems rely on

measuring the time of flight of a pulse that is
proportional to range.
Information from the sensors goes to the
Vehicle Application Controller (VAC), the
system's computing and communication center.
The VAC reads the settings the driver has selected
and figures out such things as how fast the car
should go to maintain the proper distance from
cars ahead and when the car should release the
throttle or downshift to slow down. Then it
communicates that information to devices that
control the engine and the transmission.
APPLICATIONS IN CARS
In May 1998, Toyota became the first to
introduce an AICC system on a production vehicle
when it unveiled a laser-based system for its
Progres compact luxury sedan, which it sold in
Japan. Then Nissan followed suit with a radar-
based system, in the company's Cima 41LV-2, a
luxury sedan also sold only in Japan. In
September 1999, Jaguar began offering an ACC
for its XKR coupes and convertibles sold in
Germany and Britain. Mercedes' system is an
option on its C-Class and S-Class models, which
are available in Europe; it was developed by M/A-
Com, Lowell, Mass., and uses radar made by
Filtran Microcircuits Inc., in West Caldwell, N.J.
LANE SUPPORT SYSTEM
A recent US study shows that 25% of all
accidents are caused by unintended lane
departures. Mounting evidence suggests that
drivers falling asleep, although it is difficult to
prove, as many drivers will not admit to falling
asleep, talking to a cell phone, disruption of
children etc. cause many of these accidents.
To address this, Valeo a European maker of
automotive switches and sensors and Iteris U.S.
developer of intelligent transportation system
technologies, has produced AutoVue—an
embedded camera-based lane-marking recognition
and warning system. By monitoring the visual
lane markings on the road and signaling the driver
with an audible or tactile warning, AutoVue alerts
a tired, distracted, or inattentive driver that he or
she is about to leave their lane
The lane support system audibly warns the
driver of unintended lane departure. Audio
messages are issued as the driver crosses a lane
marking without using the indicators and the
balance of the stereo sound system is controlled to
denote the direction of road departure. The lane
markings are detected by processing images from
a video camera. The current system achieves lane-
marking detection at 15 frames per second. Road
edges with no lane-markings are detected
although they are less reliable. Preliminary studies
show that it is possible for positions. The
frequency of oscillation as seen in adjoining figure
appears to be about 1/8 hertz for normal alert
drivers. This information could be used for
determining the state of driver alertness, although
further investigations are necessary before this can
be proved.
More effective than audible warnings, that
could irritate the driver, is the use of haptic
feedback in the steering wheel. The system could

provide position related assistance/resistance in
the steering wheel. The system could provide an
artificial feel of road camber on either side of the
lane. The driver is still expected to steer the
vehicle but experiences the sensation of driving
along the bottom of a bathtub. Again the system is
deactivated by either the use of the indicators or
by the driver exceeding a torque/motion input
threshold at the steering effort, improved steering
stability and safety.
The key components of the lane support
system are shown in the adjoining figure. A video
camera and processor measures the lane markings.
Another sensor measures the torque that the driver
is applying to the steering wheel. The Electronic
Control Unit (ECU) takes this measurement and
drives a motor, which in turn applies torque
through a gearbox to the steering mechanism there
by assisting the driver. The inc The key
components of the lane support system are shown
in the adjoining figure. A video camera and
processor measures the lane markings. Another
sensor measures the torque that the driver is
applying to the steering wheel. The Electronic
Control Unit (ECU) takes this measurement and
drives a motor, which in turn applies torque
through a gearbox to the steering mechanism there
by assisting the driver. The incorporation of also
improves fault tolerance.
OPERATING PRINCIPLE
When AutoVue detects an unplanned lane
departure, a sound is generated to alert the driver.
The sound can be directional so that a left-hand
departure will result in the sound being generated
in a left vehicle speaker and a right hand departure
in a right speaker.
Figure 2: Architecture of Lane Support System
A camera views the road through a "wiped"
section of the windshield, near the vehicle center
line as shown below.
The image that follows shows the outline
of the view processed in the crosshatched area
seen in the previous diagram. The system camera
is mounted on the windshield inside the cabin,
near the center line of the vehicle. The imager is
mounted high on the windshield for better
functioning of the algorithm to track lane

markings and to accommodate viewing over the
hood.
Within the system is a central processor
unit running a program that performs the lane-
tracking and warning algorithm. The CPU runs
this algorithm in conjunction with other embedded
environment tasks (communications, initialization,
and general task management). The lane-tracking
algorithm accepts image input from the system
camera and examines the lane markings. It
determines whether or not a lane departure is
imminent.
Upon such determination, and if all logic
permits (for example, a turn signal is not active,
and no system errors are present), a warning will
be issued in association with the departure. If the
system is also connected to a Controller Area
Network (CAN) a message will be generated
indicating which side of the vehicle the departure
is occurring. This message can be used to create a
warning to the driver through interfaces such as
the infotainment system or steering system.
Audible warnings are designed to be loud enough
to overcome wind noise from an open window, as
well as engine, traffic, and other noises, without
being annoying.
The AutoVue module hosts a complete
lane tracking software solution including image
capture and improvement, lane tracking
algorithms and drivers for the various system
interfaces.
Lane Departure systems have received
positive feedback from commercial vehicle
operators. A driver satisfaction study of Iteris'
Lane Departure system was conducted in 2004
including responses from 140 drivers in the U.S.
and 100 in Europe that have used the Lane
Departure system. A brief summary of the U.S.
data from the study is as follows:
98% believe the system can prevent
accidents
92% believe the system is a valuable
safety feature
71% say the system has made them safer
drivers
80% normally drive with the system
enabled
97% are satisfied or very satisfied with the
system
IMPLEMENTATION IN CARS
Already, Nissan's luxury division, Infiniti, is
offering a system, developed by Iteris and
supplied by Valeo, on its 2005 FX45 sport utility
vehicle, Infiniti's second application of the Valeo
LaneVue system will be on its 2006 M
performance sedan, which goes on sale next
spring. In Europe, Valeo is also supplying the
system to the 2005 C4 and C5 sedans from

Citroen, recently introduced at the Paris auto
show.
COLLISION AVOIDANCE SYSTEM
Every year 50,000 people are killed on the
roads in the European countries. The figure for the
USA is similar. In Britain out of 240,000
accidents in a typical year there are 5,000 fatalities
and 64,000 injuries. Many safety innovations in
the areas of banking systems, airbags, body
structures, steering and suspension have already
had a beneficial effect. However, accident
frequency and severity have still remained
unacceptably high. Accident studies places most
of the blame on drivers. Automatic Collision
Avoidance Systems could have many advantages
over human drivers; they don’t get tired or
distracted, they can simultaneously monitor all
sides of the vehicle, they generally have faster
reaction times and they don’t panic. Apart from
human tragedy these systems could significantly
decrease the economic cost of road accidents and
reduce the inconvenience associated with the
resulting traffic jams.
The main requirement for a collision
avoidance system is to be able to predict
accurately the likelihood of an imminent collision.
If a collision is likely then the system should
respond in such a way as to reduce the threat. The
response could involve the automatic control of
the vehicle or simply an appropriate warning to
the driver. Crucial to the success of any avoidance
system is the ability to reliably identify and locate
different obstacles in the complex and
unconstrained traffic scene, where conditions can
vary from thick fog at night to bright glare from
the sun on a clear day.
COLLISION AVOIDANCE SENSING
Collisions can occur at any point on the car,
therefore sensor coverage should ideally extend to
360 deg. It is probable that no sensor can satisfy
these strict demands. Headway detection systems
have received most attention as they potentially
cover majority of accident situations. However
they are difficult to implement because of the
large maximum range required for driving at
speed. Many false alarms are generated by radar
systems illuminating objects on the bends that are
safely off the vehicle path. False alarm rate should
be very low in a collision avoidance system to
avoid driver irritation. If there is automatic
braking then they should be eliminated.
Calculating collision paths on long ranges and on
bends requires a detection system with wide field
view, a high angular resolution and the detection
of the road geometry.
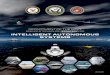
Figure 3: Architecture of Collision warning
system

Following sensing devices are generally used:
Front sensing system (MMW Radar,
LASER Radar)
Side Sensors
Vision Sensors (CCD Video Camera)
Host Vehicle Sensors
Information from the sensing system flow
to the collision warning processor module,
eventually to the Driver Vehicle Interface (DVI),
this provides the appropriate warning cue to the
driver. Each of the sensing systems receives
information from host vehicle state which
includes:
Differential wheel speed
Vehicle speed
Steering angle
Yawing rate
The date is then send to collision warning
processing module. The data contains information
like lane path, vehicle speed, range etc, relative to
host vehicle. The Collision Warning Processing
Module will then combine data from the active
sensing systems and passive sensing systems to
accomplish object detection, target tracking, in
path target identification and Threat Assessment.
Threat Assessment falls in three categories:
Time To Collision (TTC)
Time To Avoidance (TTA)
Threat or No Threat Decision
If the identified detected target is accessed
as being a potential hazard to the host vehicle then
appropriate warning cues will be issued.
The current Collision Avoidance System
uses a headway video camera and a CCD device.
The radar system is similar to AICC radar system.
The video system detects cars and lane markings
up to a distance of 60m. The low-level image
processing acquires images from a miniature CCD
video camera situated by the rear view mirror.
Edges are extracted using a technique called
Intelligent Thresholding. The edges are then
thinned using morphological techniques. The
thinned edges in the image are then traced by
fitting straight lines to them and then turned into
line vectors, which are then categorized on the
basis of angle. The horizontal lines are used by car
detection algorithm. Range is estimated from the
road to camera geometry by assuming a flat Earth.
As, a result the range data are quite noisy due car
pitching on hilly roads and small possible
variations in the determination of the car position
in the image plane.
A very high computational rate is required
for image processing. Hence microprocessors with
high computational rate are required.
DATA FUSION
Data fusion is a collection of techniques
for combining the measurements from more than
one sensor to provide a more unified result. The
sensors used can be of the same or different type.

This has several benefits:
The overall estimates of parameters can be
more accurate than for individual sensor
estimate, as they reinforce each other.
Any parameter need not depend on one
sensor alone. This has benefits of Fault
Tolerance by allowing redundancy to be
introduced into the system. For example, if
the system had infra red and video based
sensors, it could survive the failure of
either of these and continue to function
although accuracy and performance in
certain conditions can be reduced.
In Lucas system data fusion can gives major
benefits to object detection as the two sensors
could be used to complement each other
extremely well. The video produces good lateral
image but it is not able to provide good estimates
of range. The radar conversely produces good
estimates of range and hence good relative
velocity estimates, but has poor lateral positional
accuracy. Thus by fusing data from these two
sensors the object position can be localized to a
better accuracy by considering the intersection of
the two areas of positional uncertainty generated
by each sensor.
Another possible benefit of data fusion is
that of object identification, by combining the
expected responses of an object in the sensors. For
example, the image processing may confuse a
stationery pedestrian and a traffic sign, especially
at longer ranges, as they both are tall, thin objects.
However fusing data would allow an
unambiguous decision to be reached immediately
as the two objects have radically different radar
responses.
Figure 4: Object Identification by Data Fusion
DECISION STRATEGY
Having detected a hazard the system must
respond in the most appropriate way so as to avoid
the hazard. Evidence suggests that a small
reduction in driver reaction time will dramatically
reduce the number of accidents. This can achieved
either by intervening with the controls of the
vehicle or by warning the driver. Direct
intervention will have the most significant result
but causes the greatest liability concern. In the
worse case the car would contravene the driver’s
wishes by emergency braking just as the driver
decides to brake and overtake. Driver warning is
the safer option but there are still drawbacks. In
critical situation there will be no time to warn the
driver or the warning might even distract the
driver from hazard. If there are too many
warnings, false alarms, or if the driver is already
aware of hazard then warning will be irritating.
Usually, warnings are either visual or
audible. The visual warnings must be in the
driver’s field of view at the time of warning.
Audible warnings are generally more obtrusive
and hence irritating if inappropriate. However also

effective are haptic or tactile warnings. Haptic
feedback in the steering mechanism has already
been described earlier in lane support system, but
the same system can be used to increase the
steering reactance if there is an obstacle in the
driver’s blind spot during a lane change
maneuver. Kinesthetic warnings invoke a very
quick response by jerking the car or by moving
the seat. The driver rapidly decelerating the car
can quickly wake even sleeping passengers. If the
jerk situation is short then there will be little effect
on the car’s speed leaving all options open for the
driver.
Detection of hazards can be calculated by
considering the trajectories of other objects in
relation to your vehicles, its operating envelope
and the state and intentions of the driver. If the
driver is inattentive then action should be taken,
but if the driver is alert then there is no need to
take any action. Hence the decision process
should include state and intentions of the driver.
Monitoring the driver is a hard problem; it is
difficult to distinguish between a genuine lane
change and a lane drift due to drowsiness.
Progress has been made using neural networks to
learn the driver behavior. A backward error
propagation network can predict if the driver is
going to overtake or brake with a success rate of
90% when trained on only 15% of total input data.
In the situation that require direct of the
vehicle, recent work has shown the use of neural
networks for emulating driver brake and throttle
control. Such a system should be particularly
useful for AICC where drivers feel most
comfortable, when the system mimics their own
driving style.
FEATURES
Maintains safe, comfortable distance between
vehicles without driver interventions.
Maintains consistent performance in poor
visibility conditions.
Maintains continuous performance during road
turns and elevation changes.
Alerts drivers by way of automatic braking
BENEFITS
Minimizes speed differentials between
vehicles.
Reduces throttle and brake management.
To be able to adapt - therefore, learning
ability.
To be autonomous - therefore, ability to sense,
model and provide output.
The need for more safety and convenience in
the vehicle.
To overcome the loss of life and financial cost.
CONCLUSION
This paper has described a wide variety of
automotive applications for intelligent
autonomous systems. The fully autonomous car is
probably not viable in the foreseeable future.
Semiautonomous systems as discussed above are
technologically feasible but issues such as driver
acceptance, reliability, safety and product liability
have yet to be resolved. AICC and Lane Support
Systems not only reduce driver comfort but also
reduce the risk of an accident. Collision Warning

System will be useful for alerting a distracted
driver to hazard provided the time to impact is not
too critical.
When considering the benefits, cost is a
major consideration in the automotive market.
Much of the technology tends to be expensive as it
originates from low volume/high cost military
markets where volumes are high such as
microwave satellite receivers and door openers
then cost have become less and markets have been
successfully exploited. The end objective is to be
able to survive in an evolving environment and
changing circumstances, a representation - of real-
world system.
REFERENCES
1. Intelligent Autonomous systems for cars – By
R.H Tribe.
2. Autonomous Intelligent Cruise Control with
automatic braking – By Martin.p, SAE,
Detroit, February 1993.
3. http://www.bharatbook.com/general/
4. http://www.its.com
5. Automotive Design Line
6. http://www.automotivedesignline.com